1.本实用新型属于无人机技术领域,具体为可折叠的无人机用机翼。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收。可反复使用多次。广泛用于空中侦察、监视、通信、反潜、电子干扰等。
3.现有的无人机由于结构精密,在不使用时需要小心安放,但是由于无人机的体积过大,十分占用空间,而且在没有防护的环境中无人机十分容易被外物损坏。因此需要对无人机机翼的结构加以改进,同时提出可折叠的无人机用机翼,便于更好的解决上述提出的问题。
技术实现要素:
4.本实用新型的目的在于:为了解决上述提出的问题,提供可折叠的无人机用机翼。
5.本实用新型采用的技术方案如下:
6.可折叠的无人机用机翼,包括无人机动力舱,所述无人机动力舱的四角均为弯角设计,且无人机动力舱的四壁固定连接有相对应设置的固定臂,所述固定臂远离无人机动力舱的一端连接有折叠机翼,所述折叠机翼远离固定臂的一端开设有折叠槽,所述折叠槽远离固定臂的一端为开口,且折叠槽靠近固定臂的一侧通过轴承活动安装有转动轴,所述转动轴上固定连接有动力臂,且动力臂的顶部通过轴承活动安装有螺旋桨,所述螺旋桨的长度超出折叠槽的长度,所述动力臂靠近折叠槽开口的一侧铰接有支撑杆,且支撑杆的另一端与折叠槽的内壁相铰接,所述支撑杆的底部铰接有电动伸缩杆,且电动伸缩杆位于底部的一端与折叠槽的内壁固定连接。
7.在一优选的实施方式中,所述固定臂的内部为空腔,且固定臂靠近无人机动力舱一侧的内壁通过连接件固定连接有直流电机,所述直流电机的顶部固定连接有第一转动杆,且第一转动杆的顶部通过轴承与固定臂的内壁活动安装。
8.在一优选的实施方式中,所述第一转动杆上固定连接有主动齿轮,所述固定臂的上下两侧内壁靠近折叠机翼的一侧通过轴承活动安装有第二转动杆,且第二转动杆上固定连接有从动齿轮,所述从动齿轮与主动齿轮相啮合。
9.在一优选的实施方式中,所述主动齿轮的上顶面固定连接有固定栓,且固定栓上套接有第一联动杆,所述第一联动杆相对于固定栓的位置开设有长条形空槽,且固定栓位于长条形空槽内,且固定栓的顶部面积大于长条形空槽。
10.在一优选的实施方式中,所述从动齿轮的上顶面固定连接有轴承杆,且第一联动杆远离固定栓的一端与轴承杆相铰接,所述轴承杆上铰接有第二联动杆,且第二联动杆远
离轴承杆的一端开设有长条形空槽。
11.在一优选的实施方式中,所述固定臂相对于折叠机翼的一端开设有收纳槽,且折叠机翼插接在收纳槽内,所述折叠机翼靠近固定臂的一端固定连接有收纳杆,且收纳杆远离折叠机翼的一端顶面固定连接有固定杆,所述固定杆位于第二联动杆的长条形空槽内,且固定杆的顶部面积大于长条形空槽,所述折叠机翼位于固定臂内部的一端两侧壁固定连接有相对应设置的定位板,所述固定臂的内壁开设有与定位板相适配的定位槽,且定位板与定位槽滑动连接。
12.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
13.1、本实用新型中,可以通过启动固定臂内的直流电机使得第一转动杆带动主动齿轮转动,进而使得主动齿轮带动从动齿轮转动,此时主动齿轮与从动齿轮上的第一联动杆与第二联动杆在力的带动下也会进行转动,又因为固定杆位于第二联动杆的长条形空槽内,且固定杆的顶部面积大于长条形空槽,从而使得固定杆在长条形空槽内晃动的同时带动折叠机翼进行收回,使得本装置更加便于收纳。
14.2、本实用新型中,可以通过启动电动伸缩杆控制支撑杆进行支撑或是下降,从而控制螺旋桨的回收,而且螺旋桨的长度超出折叠槽的长度,进而使得螺旋桨刚好露在折叠槽的外侧,可以大大的压缩本装置的体型,从而减小本装置的占地面积,且折叠机翼收纳进入固定臂内部还可以防止外物损坏,起到有效的保护作用。
附图说明
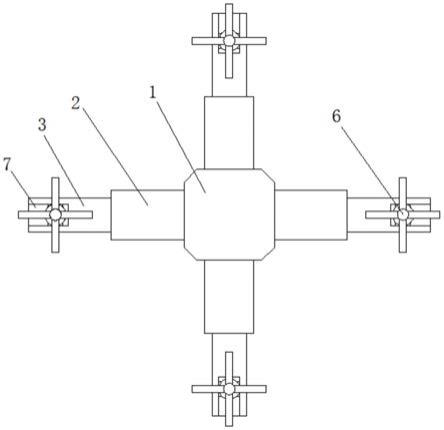
15.图1为本实用新型的结构示意图;
16.图2为本实用新型折叠槽的剖视图;
17.图3为本实用新型中固定臂的剖视图。
18.图中标记:1-无人机动力舱、2-固定臂、3-折叠机翼、4-转动轴、5-动力臂、6-螺旋桨、7-折叠槽、8-支撑杆、9-电动伸缩杆、10-直流电机、11-第一转动杆、12-主动齿轮、13-第二转动杆、14-从动齿轮、15-固定栓、16-第一联动杆、17-轴承杆、18-第二联动杆、19-收纳杆、20-固定杆、21-定位板。
具体实施方式
19.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
20.参照图1-3,可折叠的无人机用机翼,包括无人机动力舱1,无人机动力舱1的四角均为弯角设计,且无人机动力舱1的四壁固定连接有相对应设置的固定臂2,固定臂2远离无人机动力舱1的一端连接有折叠机翼3,固定臂2的内部为空腔,且固定臂2靠近无人机动力舱1一侧的内壁通过连接件固定连接有直流电机10,直流电机10的顶部固定连接有第一转动杆11,且第一转动杆11的顶部通过轴承与固定臂2的内壁活动安装,第一转动杆11上固定连接有主动齿轮12,固定臂2的上下两侧内壁靠近折叠机翼3的一侧通过轴承活动安装有第二转动杆13,且第二转动杆13上固定连接有从动齿轮14,从动齿轮14与主动齿轮13相啮合,主动齿轮13的上顶面固定连接有固定栓15,且固定栓15上套接有第一联动杆16,第一联动
杆16相对于固定栓15的位置开设有长条形空槽,且固定栓15位于长条形空槽内,且固定栓15的顶部面积大于长条形空槽,从动齿轮14的上顶面固定连接有轴承杆17,且第一联动杆16远离固定栓15的一端与轴承杆17相铰接,轴承杆17上铰接有第二联动杆18,且第二联动杆18远离轴承杆17的一端开设有长条形空槽,固定臂2相对于折叠机翼3的一端开设有收纳槽,且折叠机翼3插接在收纳槽内,折叠机翼3靠近固定臂2的一端固定连接有收纳杆19,且收纳杆19远离折叠机翼3的一端顶面固定连接有固定杆20,固定杆20位于第二联动杆18的长条形空槽内,且固定杆20的顶部面积大于长条形空槽,折叠机翼3位于固定臂2内部的一端两侧壁固定连接有相对应设置的定位板21,固定臂2的内壁开设有与定位板21相适配的定位槽,且定位板21与定位槽滑动连接,方便对折叠机翼3进行定位,使其在收回放出时不会出现抖动或是错位情况,启动直流电机10使得第一转动杆11带动主动齿轮12转动,进而使得主动齿轮12带动从动齿轮14转动,此时主动齿轮12与从动齿轮14上的第一联动杆16与第二联动杆18在力的带动下也会进行转动,又因为固定杆20位于第二联动杆18的长条形空槽内,且固定杆20的顶部面积大于长条形空槽,从而使得固定杆20在长条形空槽内晃动的同时带动折叠机翼3进行收回,折叠机翼3远离固定臂2的一端开设有折叠槽7,折叠槽7远离固定臂2的一端为开口,且折叠槽7靠近固定臂2的一侧通过轴承活动安装有转动轴4,转动轴4上固定连接有动力臂5,且动力臂5的顶部通过轴承活动安装有螺旋桨6,螺旋桨6的长度超出折叠槽7的长度,使得螺旋桨6刚好露在折叠槽7的外侧,动力臂5靠近折叠槽7开口的一侧铰接有支撑杆8,且支撑杆8的另一端与折叠槽7的内壁相铰接,支撑杆8的底部铰接有电动伸缩杆9,且电动伸缩杆9位于底部的一端与折叠槽7的内壁固定连接,可以通过启动电动伸缩杆9控制支撑杆8进行支撑或是下降,从而控制螺旋桨6的回收。
21.工作原理:本技术中,在需要放置回收无人机时,启动电动伸缩杆9,带动支撑杆8下降,从而使得动力臂5在转动轴4的作用下往侧边瘫倒,而且螺旋桨6的长度超出折叠槽7的长度,进而使得螺旋桨6刚好露在折叠槽7的外侧,随后启动固定臂2内的直流电机10使得第一转动杆11带动主动齿轮12转动,进而使得主动齿轮12带动从动齿轮14转动,此时主动齿轮12与从动齿轮14上的第一联动杆16与第二联动杆18在力的带动下也会进行转动,又因为固定杆20位于第二联动杆18的长条形空槽内,且固定杆20的顶部面积大于长条形空槽,从而使得固定杆20在长条形空槽内晃动的同时带动折叠机翼3进行收回。
22.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。