1.本实用新型涉及无人机技术领域,尤其涉及一种基于图像识别的全天候无人机识别设备。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由机载计算机完全地或间歇性自主地操作。它具有体积小、造价低、使用方便的优点,被广泛运用于各种各样的生活当中。
3.无人机识别设备是一种依据图像识别来辅助无人机的常用设备,如申请号为201821944490.0的实用新型专利,通过拍摄无人机的飞行姿态以及空域内其他信息,来修整无人机的飞行。
4.现在随着无人机发展出全天候的工作能力,安装于户外的识别设备也相应的也要适应全天候的工作条件。当遇到雷暴、冰雹等极端天气,或是大风卷起石块,都有可能击破用于保护摄像模组的外镜片,使得摄像模组的镜头直面砂石雨水,造成昂贵的摄像模组损坏。
技术实现要素:
5.有鉴于此,有必要提供一种基于图像识别的全天候无人机识别设备,用以解决现有技术中外镜片损坏后,摄像模组失去保护,容易损坏的技术问题。
6.本实用新型提供一种基于图像识别的全天候无人机识别设备,该基于图像识别的全天候无人机识别设备包括:保护壳、外镜片、震动传感器、转动装置以及摄像模组,保护壳内部形成有容纳腔,保护壳上表面形成连通容纳腔的上开口,外镜片与上开口固定密封连接供以封闭上开口,震动传感器与外镜片连接供以检测外镜片的震动幅度,转动装置与摄像模组传动连接并且共同内置于容纳腔内;震动传感器设定有一阈值,当外镜片震动幅度达到阈值时,转动装置驱动摄像模组从朝向外镜片的第一位置转动至第二位置。
7.进一步的,转动装置包括保护套筒以及与保护套筒传动连接的转动机构,保护套筒一端开口且另一端封闭,其内部形成保护腔,摄像模组内置于保护腔内且朝向保护套筒的开口端。
8.进一步的,转动装置还包括一端与保护套筒固定连接,另一端与保护壳转动连接的转轴,转动机构与转轴传动连接,通过转轴带动保护套筒以及摄像模组转动。
9.进一步的,转动机构包括伺服电机以及皮带,皮带套设于伺服电机的旋转轴以及转轴上并张紧,旋转轴通过皮带带动转轴旋转。
10.进一步的,基于图像识别的全天候无人机识别设备还包括内置于保护腔内并与摄像模组传动连接的升降装置。
11.进一步的,升降装置为电动推杆。
12.进一步的,基于图像识别的全天候无人机识别设备还包括插杆,插杆上端与保护
壳固定连接。
13.进一步的,保护壳底部开设有连通容纳腔底部的排水孔。
14.进一步的,第二位置与第一位置的夹角为120
°‑
240
°
。
15.进一步的,当摄像模组位于第二位置时,摄像模组背向外镜片。
16.与现有技术相比,本基于图像识别的全天候无人机识别设备在外镜片上设置有震动传感器,当飞石、冰雹等物体击中外镜片并且冲击力足以损坏外镜片时,就会在外镜片上产生达到阈值的震动并被震动传感器检测到,然后转动装置会转动摄像模组使得摄像模组的镜头远离上开口,避免被砂石雨水损坏。
17.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以本实用新型的较佳实施例并配合附图详细说明如下。本实用新型的具体实施方式由以下实施例及其附图详细给出。
附图说明
18.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
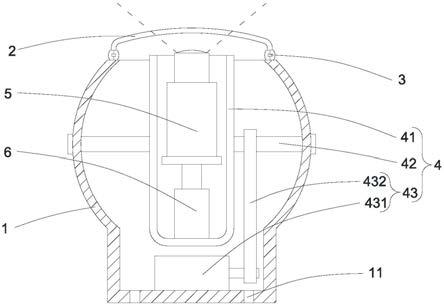
19.图1为本实用新型提供的基于图像识别的全天候无人机识别设备的结构示意图;
20.图2为摄像模组处于第一位置时保护壳内部的结构示意图;
21.图3为摄像模组处于第二位置时保护壳内部的结构示意图。
具体实施方式
22.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本技术一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
23.请参见图1至图3,本基于图像识别的全天候无人机识别设备包括保护壳1、外镜片2、震动传感器3、转动装置4以及摄像模组5。
24.保护壳1内部形成有容纳腔,保护壳1上表面形成连通容纳腔的上开口,外镜片2与上开口固定密封连接供以封闭上开口。转动装置4与摄像模组5内置于容纳腔内,外镜片2用于保护摄像模组5。在本实施例中,外镜片2通常采用钢化玻璃制作,摄像模组5透过外镜片2进行拍摄,利用图像识别得到的信息指导修整无人机的飞行状态。震动传感器3 与外镜片2连接供以检测外镜片2的震动幅度,震动传感器3设定有一阈值,当达到该阈值时,就表明外镜片2存在被损坏的风险。
25.转动装置4与摄像模组5传动连接并且共同内置于容纳腔内,当外镜片2震动幅度达到阈值时,转动装置4驱动摄像模组5从朝向外镜片2 的第一位置转动至第二位置。第二位置通常指的是将摄像模组5的镜头朝下,即从第一位置旋转120
°‑
240
°
得到第二位置,使得雨水砂石不能直接接触到摄像模组5的镜头,以保护昂贵且脆弱的镜头。优选地,可以将第二位置设置为背向外镜片2的方向,即从第一位置旋转180
°
得到第二位置。
26.外镜片2上可以均匀分布多个震动传感器3,当其中一个震动传感器 3达到阈值时就控制转动装置4带动摄像模组5旋转。这样可以避免撞击点距离震动传感器3较远,导致测
量数值偏低的问题。
27.为了更好地保护摄像模组5,在本实施例中优选地,转动装置4包括保护套筒41、转轴42以及转动机构43。保护套筒41一端开口且另一端封闭,内部形成保护腔,摄像模组5内置于保护腔内且朝向保护套筒的开口端。转轴42一端与保护套筒41固定连接,另一端与保护壳1转动连接,转动机构43与转轴42传动连接,通过转轴42带动保护套筒41 以及摄像模组5转动。
28.当转动到第二位置时,如图3所示,外镜片2破损处正对保护套筒 41,从破损处进入的雨水砂石撞击在保护套筒41上,保护套筒41保护了内部的摄像模组5。
29.在本实施例中,转动机构43包括伺服电机431以及皮带432,皮带 432套设于伺服电机431的旋转轴以及转轴42上并张紧,旋转轴通过皮带432带动转轴42旋转。在其他实施例中,转动机构也可以采用链条
‑ꢀ
链轮的传动形式,即电机带动链轮旋转,转轴42上也套设有链轮,两个链轮通过链条传动。
30.为了进一步保护摄像模组5,还可以在保护腔内部设置与摄像模组5 传动连接的升降装置6,当从第一位置转动至第二位置时,升降装置6可以带动摄像模组5缩回到保护腔内。
31.并且为了简化本设备的结构,升降装置6最好也采用电控形式,以便于与伺服电机431一并进行控制和供能。因此升降装置6优选采用电动推杆,就能与伺服电机431一同接受外部供电或蓄电池供电。
32.本设备一般是用于在野外,因此可以设置一个插杆7以便于在野外部署。插杆7上端固定连接保护壳1,插杆7下端尖锐,插入到泥土中就能够将本识别设备固定安装好。
33.此外,当外镜片2破损之后,雨水会进入到容纳腔内,容纳腔内的雨水越积越多,还是可能会损坏摄像模组5。因此优选地,在保护壳1底部开设有连通容纳腔底部的排水孔11,以便于及时排出雨水,避免雨水积蓄损坏摄像模组5。
34.本装置安装在户外使用时,当遇到恶劣天气,无人机自动或受控返回,而本装置不便于人员进行回收时。冰雹或石块击中外镜片2,当冲击力足以损坏外镜片2时,产生的震动达到震动传感器3的阈值,伺服电机431带动保护套筒41旋转,同时升降装置6带动摄像模组5缩回到保护腔内,以保护摄像模组5。待天气好转后再由技术人员回收并维修。
35.实施本实用新型实施例,具有如下有益效果:本基于图像识别的全天候无人机识别设备在外镜片上设置有震动传感器,当飞石、冰雹等物体击中外镜片并且冲击力足以损坏外镜片时,就会在外镜片上产生达到阈值的震动并被震动传感器检测到,然后转动装置会转动摄像模组使得摄像模组的镜头远离上开口,避免被砂石雨水损坏。
36.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。