1.本实用新型属于无人机停机坪技术领域,尤其涉及一种无人机降落平台升降装置。
背景技术:
2.风力发电行业巡检投入无人机进行巡检,大大提高了巡检的效率,无人机停机坪用于无人机的停靠。
3.目前,无人机停机坪仅仅是提供一个平台,无人机停落在停机坪上后,因为无人机的停机位置有所偏差,因而需要从电池仓内手动拿出电池进行更换,使得停机坪的体积笨重,不便于运输。
技术实现要素:
4.本实用新型的目的在于:为了解决无人机停机坪需要手动更换电池,导致电池更换繁琐、停机坪体积大的问题,而提出的一种无人机降落平台升降装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种无人机降落平台升降装置,其包括:
6.机箱本体,其为无盖长方体箱体结构,所述机箱本体的相对两侧铰接有双开门;
7.两扇滑动门,其滑动设于所述机箱本体的顶部,两扇所述滑动门封住所述机箱本体的顶部,所述滑动门与所述机箱本体之间通过第一驱动机构连接;
8.平台本体,其位于所述机箱本体内,所述平台本体通过升降机构固定连接在所述机箱本体的内侧壁上;
9.控制柜,其固定安装于所述机箱本体内,所述控制柜位于所述平台本体的一侧,所述控制柜的侧壁上设置有电池柜;
10.电池取放夹,其通过多轴机构固定安装在所述机箱本体的内侧壁上,所述电池取放夹位于所述电池柜的一侧,且所述电池取放夹位于所述平台本体的一侧;
11.两组纠偏机构,其滑动设于所述机箱本体的顶部,所述纠偏机构位于所述滑动门的下方。
12.作为上述技术方案的进一步描述:
13.所述第一驱动机构包括第一电机、第一齿轮和第一齿条,所述第一电机固定安装在所述机箱本体上,所述第一齿轮固定在所述第一电机上,所述第一齿条固定连接于所述滑动门的底部,所述第一齿轮与所述第一齿条啮合。
14.作为上述技术方案的进一步描述:
15.所述升降机构包括第三滑台和支撑架,所述第三滑台沿垂直方向布置并固定安装在所述机箱本体上,所述支撑架的一端固定连接在所述第三滑台上,且所述支撑架的另一端固定安装在所述平台本体的底部。
16.作为上述技术方案的进一步描述:
17.所述电池柜上开设有多个电池容纳仓。
18.作为上述技术方案的进一步描述:
19.所述多轴机构与所述升降机构位于所述机箱本体内的相对两侧。
20.作为上述技术方案的进一步描述:
21.所述多轴机构包括第一滑台和第二滑台,所述第一滑台沿水平方向布置并固定安装在所述机箱本体的内侧壁上,所述第二滑台沿竖直方向布置并固定安装在所述第一滑台上,所述电池取放夹固定安装在所述第二滑台上。
22.作为上述技术方案的进一步描述:
23.所述机箱本体的顶部设置有固定框,所述固定框位于所述滑动门的下方,所述平台本体位于所述固定框内,且所述平台本体的侧壁贴合所述固定框的内侧壁。
24.作为上述技术方案的进一步描述:
25.所述机箱本体的顶部的相对两侧设置有两根导轨,所述纠偏机构包括横梁、两个驱动电机、同步带和两个纠偏辊,所述横梁通过两组第二驱动机构连接两根所述导轨,两个所述驱动电机固定安装在所述横梁的相对两端,所述驱动电机上安装有带轮,所述同步带套设于两个所述带轮上,两个所述纠偏辊固定连接在所述同步带上。
26.作为上述技术方案的进一步描述:
27.所述第二驱动机构包括第二电机、第二齿轮和第二齿条,所述第二电机固定安装在所述横梁上,所述第二齿轮固定在所述第二电机上,所述第二齿条固定连接于所述导轨的底部,所述第二齿轮与所述第二齿条啮合,所述第二齿条与所述导轨平行。
28.作为上述技术方案的进一步描述:
29.其中一个所述纠偏辊固定连接在所述同步带的上方外侧面上,另一个所述纠偏辊固定连接在所述同步带的下方内侧面上。
30.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
31.1、本实用新型中,通过第一驱动机构带动滑动门向两侧滑动打开,在机箱本体上留出提供无人机停靠的平台本体,升降机构带动平台本体升降,将停靠的无人机收纳到机箱本体的内部,从而实现无人机的升降式停靠,大大节省了机箱本体的空间。
32.2、本实用新型中,通过第二驱动机构带动横梁沿着导轨滑动,从而将停靠在停机坪上的无人机进行一个方向的位置调整,并通过纠偏机构带动纠偏辊移动,从而对无人机进行另一个方向的位置调整,便于无人机进入机箱本体内的位置统一,在通过多轴机构带动电池取放夹取出电池柜内不同电池容纳仓内的电池,有利于电池的定向更换。
附图说明
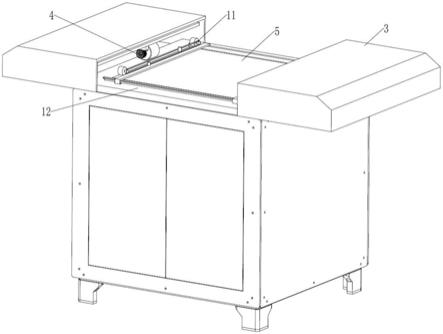
33.图1为一种无人机降落平台升降装置的整体结构示意图。
34.图2为一种无人机降落平台升降装置的内部结构示意图一。
35.图3为一种无人机降落平台升降装置的内部结构示意图二。
36.图4为一种无人机降落平台升降装置的内部结构示意图三。
37.图5为图4中a部分的局部放大图。
38.图6为图4中b部分的局部放大图。
39.图7为一种无人机降落平台升降装置的使用状态参考图。
40.图例说明:
41.1、机箱本体;2、双开门;3、滑动门;4、第一驱动机构;41、第一电机; 42、第一齿轮;43、第一齿条;5、平台本体;6、升降机构;61、第三滑台;62、支撑架;7、控制柜;8、电池柜;9、电池取放夹;10、多轴机构;101、第一滑台;102、第二滑台;11、纠偏机构;111、横梁;112、驱动电机;113、同步带; 114、纠偏辊;12、固定框;13、导轨;14、第二驱动机构;141、第二电机;142、第二齿轮;143、第二齿条;15、带轮;16、电池容纳仓。
具体实施方式
42.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
43.请参阅图1
‑
7,本实用新型提供一种技术方案:一种无人机降落平台升降装置,包括:
44.机箱本体1,其为无盖长方体箱体结构,所述机箱本体1的相对两侧铰接有双开门2;
45.两扇滑动门3,其滑动设于所述机箱本体1的顶部,两扇所述滑动门3封住所述机箱本体1的顶部,所述滑动门3与所述机箱本体1之间通过第一驱动机构 4连接;
46.平台本体5,其位于所述机箱本体1内,所述平台本体5通过升降机构6固定连接在所述机箱本体1的内侧壁上;
47.控制柜7,其固定安装于所述机箱本体1内,所述控制柜7位于所述平台本体5的一侧,所述控制柜7的侧壁上设置有电池柜8;
48.电池取放夹9,其通过多轴机构10固定安装在所述机箱本体1的内侧壁上,所述电池取放夹9位于所述电池柜8的一侧,且所述电池取放夹9位于所述平台本体5的一侧;
49.两组纠偏机构11,其滑动设于所述机箱本体1的顶部,所述纠偏机构11位于所述滑动门3的下方;
50.所述第一驱动机构4包括第一电机41、第一齿轮42和第一齿条43,所述第一电机41固定安装在所述机箱本体1上,所述第一齿轮42固定在所述第一电机41上,所述第一齿条43固定连接于所述滑动门3的底部,所述第一齿轮42与所述第一齿条43啮合,第一电机41转动带动第一齿轮42转动,第一齿轮42驱动第一齿条43平移,从而驱动滑动门3的开关;
51.所述升降机构6包括第三滑台61和支撑架62,所述第三滑台61沿垂直方向布置并固定安装在所述机箱本体1上,所述支撑架62的一端固定连接在所述第三滑台61上,且所述支撑架62的另一端固定安装在所述平台本体5的底部,第三滑台61升降带动平台本体5升降;
52.所述电池柜8上开设有多个电池容纳仓16;
53.所述多轴机构10与所述升降机构6位于所述机箱本体1内的相对两侧,保证升降机构6驱动平台本体5升降的同时,与多轴机构10互不干涉;
54.所述多轴机构10包括第一滑台101和第二滑台102,所述第一滑台101沿水平方向布置并固定安装在所述机箱本体1的内侧壁上,所述第二滑台102沿竖直方向布置并固定安
装在所述第一滑台101上,所述电池取放夹9固定安装在所述第二滑台102上,第一滑台101带动电池取放夹9沿水平方向移动,第二滑台102 带动电池取放夹9沿垂直方向移动,从而使得电池取放夹9可以移动到电池柜8 上不同的电池容纳仓16内,取出电池可供更换;
55.所述机箱本体1的顶部设置有固定框12,所述固定框12位于所述滑动门3 的下方,所述平台本体5位于所述固定框12内,且所述平台本体5的侧壁贴合所述固定框12的内侧壁;
56.所述机箱本体1的顶部的相对两侧设置有两根导轨13,所述纠偏机构11包括横梁111、两个驱动电机112、同步带113和两个纠偏辊114,所述横梁111 通过两组第二驱动机构14连接两根所述导轨13,两个所述驱动电机112固定安装在所述横梁111的相对两端,所述驱动电机112上安装有带轮15,所述同步带113套设于两个所述带轮15上,两个所述纠偏辊114固定连接在所述同步带113 上,驱动电机112带动带轮15转动,带轮15驱动同步带113转动,同步的转动带动两个纠偏辊114位移,纠偏辊114推动无人机在平台本体5上的位置;
57.所述第二驱动机构14包括第二电机141、第二齿轮142和第二齿条143,所述第二电机141固定安装在所述横梁111上,所述第二齿轮142固定在所述第二电机141上,所述第二齿条143固定连接于所述导轨13的底部,所述第二齿轮 142与所述第二齿条143啮合,所述第二齿条143与所述导轨13平行,第二电机 141转动带动第二齿轮142转动,第二齿轮142与第二齿条143相互作用,使得横梁111沿着导轨13滑动,从而使得横梁111推动无人机在平台本体5上的位置;
58.其中一个所述纠偏辊114固定连接在所述同步带113的上方外侧面上,另一个所述纠偏辊114固定连接在所述同步带113的下方内侧面上,使得同步带113 在转动时,两个纠偏辊114同向或异向滑动。
59.工作原理:首先,第一电机41转动带动第一齿轮42转动,第一齿轮42驱动第一齿条43平移,从而驱动滑动门3的打开,无人机停靠在平台本体5上,其次,驱动电机112带动带轮15转动,带轮15驱动同步带113转动,同步的转动带动两个纠偏辊114位移,纠偏辊114推动无人机在平台本体5上的位置,第二电机141转动带动第二齿轮142转动,第二齿轮142与第二齿条143相互作用,使得横梁111沿着导轨13滑动,从而使得横梁111推动无人机在平台本体5上的位置,接着,待无人机的位置调整完成后,第三滑台61升降带动平台本体5 升降,无人机进入机箱本体1内部,此时,第一电机41转动带动第一齿轮42转动,第一齿轮42驱动第一齿条43平移,从而驱动滑动门3的关闭,最后,第一滑台101带动电池取放夹9沿水平方向移动,第二滑台102带动电池取放夹9沿垂直方向移动,从而使得电池取放夹9可以移动到电池柜8上不同的电池容纳仓 16内,取出电池可供更换。
60.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。