1.本实用新型属于机器人技术领域,尤其涉及一种多用途移动装置。
背景技术:
2.机器人作为当今社会重要的工具,在工业生产、科研实验、教学展示当中起到了很多重要的作用。
3.我国已有的轮式行星巡视器,如玉兔号/玉兔2号,以及天问1号携带的中国火星车,均有许多特色功能,然而,目前机器人在不同行星的地表环境中,会面临各种各样的障碍物、复杂的地表情况以及多样的任务场景,而现有的移动机器人有如下缺点:
4.1)移动系统采用常规布局,无法跨越大于轮胎直径的障碍物;
5.2)整机耦合程度高,后续升级和替换功能部件困难,一旦定型难以实现功能的变更。
6.3)现有技术还存在着扩展性能弱,可变性能局限,结构功能简单,往往只能实现一种结构和功能,使用局限。
技术实现要素:
7.本实用新型为解决上述技术问题,提供了一种多用途移动装置。
8.为解决上述问题,本实用新型的技术方案为:
9.一种多用途移动装置,包括:中桥、前悬臂、后悬臂、轮胎组件、转向电机;
10.中桥的两端均连接有前悬臂、后悬臂,前悬臂的一端与中桥连接,前悬臂的另一端经一转向电机与轮胎组件连接,后悬臂的一端与中桥连接,后悬臂的另一端经一转向电机与一轮胎组件连接;
11.轮胎组件包括轮胎本体、用于独立驱动轮胎本体的驱动电机、以及通用支架,其中,通用支架设有转动固定部、直接固定部,转动固定部用于与转向电机连接,直接固定部用于与前悬臂或后悬臂连接。
12.根据本实用新型一实施例,转向电机上设有外接支架,转向电机固定于外接支架上,外接支架的一端与前悬臂或后悬臂连接,外接支架的另一端设有用于结构功能扩展的第一外接连接件。
13.根据本实用新型一实施例,还包括后摇臂,后悬臂的另一端与后摇臂的一端连接,后摇臂的另一端设有一轮胎组件,其中,后摇臂的另一端与通用支架的直接固定部连接。
14.根据本实用新型一实施例,通用支架呈c型结构,c型结构具有相互平行的顶面与底面、以及与顶面垂直的侧面,驱动电机固定于c型结构的底面,转动固定部设于c型结构的顶面,直接固定部设于c型结构的侧面。
15.根据本实用新型一实施例,中桥设有差速器模组,其中,差速器模组为高扭矩型差速器或带阻尼型差速器或带电机主动型差速器或带差速锁型差速器或带角度传感器型差速器。
16.根据本实用新型一实施例,还包括智能搭载平台,中桥设于智能搭载平台上,其中,智能搭载平台包括可编程控制器、可拆卸安装区,可编程控制器分别与驱动电机、转向电机电连接,可拆卸安装区设有可拆卸连接件。
17.根据本实用新型一实施例,可拆卸连接件为销块或孔槽,其中,孔槽用于销孔连接和/或螺丝连接。
18.根据本实用新型一实施例,智能搭载平台上还设有二轴桅杆模块,其中,二轴桅杆模块包括桅杆本体、二轴旋转组件,桅杆本体的一端与二轴旋转组件传动连接,桅杆本体的一端设有用于结构功能扩展的第三外接连接件,二轴旋转组件用于驱动桅杆本体二轴旋转。
19.根据本实用新型一实施例,中桥、前悬臂、后悬臂、轮胎组件、转向电机之间的连接均为可拆卸连接。
20.本实用新型与现有技术相比具有以下的优点和积极效果:
21.本实用新型可通过更换移动装置不同的结构配置成4轮、6轮和8轮等结构,可作为月球车、火星车等适合不同行星表面特征的巡视器的移动装置,以模块化可编程6轮月球车形态为例,具有六轮独立驱动,四轮独立转向,通过差速器模组可以实现左右悬架差动,通过起伏地形时,能有效抑制车身俯仰角度,通过增加后摇臂可以实现摇臂悬架式结构特征,通过可拆卸连接方式以及通用式设计,结构上可以灵活多变,结构组装简单,通过更换不同的差速器模组,可供多种工况下使用,大大增加移动装置的通用性、可扩展性、功能性,使得其不在局限于一种结构与功能,使用更加方便、效果更加卓越。
附图说明
22.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。
23.图1为本实用新型的一种多用途移动装置的扩展结构图;
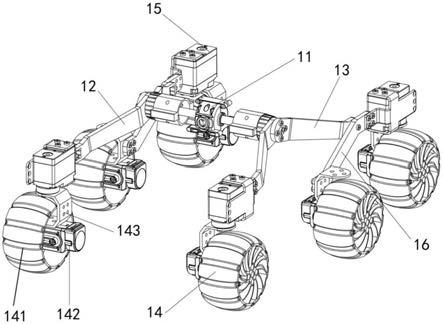
24.图2为本实用新型的一种多用途移动装置的原始结构图;
25.图3a~d为本实用新型的一种多用途移动装置的扩展结构三维图;
26.图4a~d为本实用新型的一种多用途移动装置的原始结构三维图;
27.图5a~e为本实用新型的一种多用途移动装置的桅杆模块运动示意图;
28.图6a~e为本实用新型的一种多用途移动装置的车身俯仰幅度示意图;
29.图7a~e为本实用新型的一种多用途移动装置的四轮独立转向示意图。
30.附图标记说明:
[0031]1‑
移动装置;11
‑
中桥;12
‑
前悬臂;13
‑
后悬臂;14
‑
轮胎组件;141
‑
轮胎本体;142
‑
驱动电机;143
‑
通用支架;15
‑
转向电机;16
‑
后摇臂;2
‑
智能搭载平台;31
‑
执行器套件;32
‑
二轴桅杆模块;33
‑
太阳能电池模块;34
‑
综合交互套件;35
‑
测距模块;36
‑
相机模块;37
‑
外壳套件。
具体实施方式
[0032]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对照附图
说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
[0033]
为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
[0034]
以下结合附图和具体实施例对本实用新型提出的一种多用途移动装置作进一步详细说明。
[0035]
参看图2和图4a~d,本技术提供了一种多用途移动装置,包括:中桥11、前悬臂12、后悬臂13、轮胎组件14、转向电机15;
[0036]
中桥11的两端均连接有前悬臂12、后悬臂13,前悬臂12的一端与中桥 11连接,前悬臂12的另一端经一转向电机15与轮胎组件14连接,后悬臂 13的一端与中桥11连接,后悬臂13的另一端经一转向电机15与一轮胎组件14连接;
[0037]
轮胎组件14包括轮胎本体141、用于独立驱动轮胎本体141的驱动电机 142、以及通用支架143,其中,通用支架143设有转动固定部、直接固定部,转动固定部用于与转向电机15连接,直接固定部用于与前悬臂12或后悬臂 13连接。
[0038]
现对本实施例进行详细说明,但不仅限于此。
[0039]
本实施例的移动装置不仅作为工业生产、科研实验当中相关机器人的移动装置,而且特别适用于作为一可供单人放置桌面操作的、用于模拟如月球车、火星车系统结构的桌面级电动教学具的移动装置,其具有差动摇臂悬架移动系统的独立驱动、独立转向,左右悬架差动和摇臂悬架式结构特征,其中,本实施例特别适用于各种不同模型的教学,具有通用性强、扩展性强的特点,可供多种教学情况下使用。
[0040]
具体地,参看图2和图4a~d,本实施例的移动装置1包括中桥11、前悬臂12、后悬臂13、轮胎组件14、转向电机15。本实施例以四轮驱动结构为例,中桥11的两端均连接有前悬臂12、后悬臂13,前悬臂12的一端与中桥 11连接,前悬臂12的另一端经一转向电机15与轮胎组件14连接,后悬臂 13的一端与中桥11连接,后悬臂13的另一端经一转向电机15与一轮胎组件14连接,转向电机15可以驱动整个轮胎组件14绕驱动轴转动,以实现轮胎组件14的独立转向。进一步地,若需扩展得到六轮驱动结构,移动装置1 需增加一对后摇臂16和一对轮胎组件14,将后悬臂13的另一端与后摇臂16 的一端连接,后摇臂16的另一端设有一轮胎组件14,如此便组装成六轮独立驱动、四轮独立转向的驱动结构,如图7a~e所示,本实施例将左前、右前、左后、右后四个轮子各自额外带有一个转向电机15,以此实现该四个轮胎组件14的分别独立转向。同理,还可以增加一对前摇臂和一对轮胎组件14,形成需要的八轮驱动结构。
[0041]
其中,参看图2和图6a~e,本实施例的中桥11设有差速器模组,可以实现差动结构,以使得通过崎岖地貌时减少车身俯仰的幅度,从而相对保持车身的平稳、以及整体的重心稳定,提高巡视器的运动稳定性。优选地,中桥11、前悬臂12、后悬臂13、轮胎组件14、转向电机15之间的连接均为可拆卸连接。优选地,差速器模组为高扭矩型差速器或带阻尼型差速器或带电机主动型差速器或带差速锁型差速器或带角度传感器型差速器,通过更换不同
的差速器模组,可供多种工况下使用,大大增加移动装置的通用性。
[0042]
优选地,参看图2,转向电机15上设有外接支架,转向电机15固定于外接支架上,外接支架的一端与前悬臂12或后悬臂13或后摇臂16连接,外接支架的另一端设有用于结构功能扩展的第一外接连接件。
[0043]
参看图2,本实施例的轮胎组件14包括轮胎本体141、用于独立驱动轮胎本体141的驱动电机142、以及通用支架143,其中,通用支架143设有转动固定部、直接固定部,通用支架143设有转动固定部、直接固定部,转动固定部用于与转向电机15连接,直接固定部用于与前悬臂12或后悬臂13 连接。具体地,本实施例的通用支架143采用c型支架,c型支架的底部用于固定驱动电机142,c型支架的中部设置直接固定部,悬臂或摇臂可直接与其固定,以实现整个轮胎组件14的固定连接,c性支架的顶部设置旋转固定部,悬臂或摇臂可以经一转动驱动器与其固定,使得转动驱动器可控制整个轮胎组件14水平转动。其中,本实施例的直接固定部、转动固定部采用开孔的形式,该孔不仅可以作为销孔连接,也可以作为螺丝固定的孔。
[0044]
本实施例可通过更换移动装置不同的结构配置成4轮、6轮和8轮等结构,以模块化可编程6轮月球车形态为例,具有六轮独立驱动,四轮独立转向,通过差速器模组可以实现左右悬架差动,通过增加后摇臂可以实现摇臂悬架式结构特征,结构上可以灵活多变,结构变化简单,通过更换不同的差速器模组,可供多种工况下使用,大大增加移动装置的通用性、可扩展性、功能性,使得其不在局限于一种结构与功能,使用更加方便、效果更加卓越。
[0045]
较优地,参看图1,本实施例还包括智能搭载平台2,中桥11设于智能搭载平台2上,其中,智能搭载平台2包括可编程控制器、可拆卸安装区,可编程控制器分别与驱动电机142、转向电机15电连接,可拆卸安装区设有可拆卸连接件。其中,本实施例的可编程控制器可以进行控制逻辑编程,以实现对移动装置的运动逻辑控制。
[0046]
具体地,参看图1和图3a~3d,本实施例的智能搭载平台2设有机头与机身,可拆卸安装区可以分为固定安装区和通用安装区,机头与机身分别设有固定安装区与通用安装区。固定安装区设有用于可拆卸安装模块化载荷的固定连接件,通用安装区设有用于结构功能扩展的通用连接件。本实施例的固定安装区是为模块化载荷设定的固定安装位置,即图1中各个模块载荷的固定位置,参看图3d,通用安装区是为一些通用性配件设定的固定安装位置。具体地,固定安装区设有用于可拆卸安装模块化载荷的固定连接件,通用安装区设有用于结构功能扩展的通用连接件,优选地,固定连接件、通用连接件可以为销块或孔槽,其中,孔槽用于销孔连接和/或螺丝连接(参看图3d),例如兼容积木规格的安装孔位。同理,本实施例中的第一外接连接件同样可以采用上述结构。
[0047]
参看图1,本实施例可以设有多样化的模块化载荷,包括执行器套件31、环境感知套件、太阳能电池模块33、综合交互套件34,其中,执行器套件可以包括机械臂、照明灯、牵引绞盘、样本钻取器、云台相机、种植机构,其中,机械臂的末端设有用于结构功能扩展的第二外接连接件;环境感知套件可以包括相机模块36、测距模块35、扫描模块、雷达模块、声呐模块、定位模块;综合交互套件可以包括触摸屏模块、盲文模块、语音模块、投影模块。
[0048]
较优地,参看图1和图5a~e,智能搭载平台上还设有二轴桅杆模块32,其中,二轴桅杆模块包括桅杆本体、二轴旋转组件,桅杆本体的一端与二轴旋转组件传动连接,桅杆本体的一端设有用于结构功能扩展的第三外接连接件,二轴旋转组件用于驱动桅杆本体二轴
旋转。本实施例的二轴桅杆模块32 采用二轴设计,在可编程控制器控制下可以实现自身展开、收拢、转动,其顶部可以搭载相机模块36。
[0049]
本实施例的执行器模块、综合交互模块安装于机头上的固定安装区,环境感知套件安装于固定安装区和/或通用安装区和/或移动装置上和/或二轴桅杆模块上。具体地,参看图1,本实施例的执行器模块采用通用机械臂模块,机械臂末端通过第二外接连接件安装夹持、采样、视频传输等设备,具体将执行器套件31安装于智能搭载平台2的前部,机械臂可以采用三轴设计,在可编程控制器控制下可以执行各种操作。本实施例的太阳能电池模块33安装于智能搭载平台2的顶部,可以为机器人提供一部分电能。本实施例的综合交互套件34安装于智能待在平台的前部斜面,以便于显示指示。本实施例环境感知套件中采用了相机模块36和测距模块35,测距模块35设置于安装于智能搭载平台2的前部执行器套件31的两侧和/或转向电机15靠外的一侧,在可编程控制器控制下可以实现小车避障、线路追踪等等。
[0050]
较优地,参看图1,本实施例还包括与智能搭载平台可拆卸连接的积木组件、外壳套件37,积木组件、外壳套件37安装于通用安装区,积木组件为与通用连接件可拆卸连接的配件,其可以设有例如销孔连接的销或孔,其形状结构可以各式各样,通过积木组件可以在智能搭载平台2上搭建出各种各样的结构。
[0051]
参看图1,本实施例智能搭载平台上可通过更换不同的模块化载荷,如,执行器套件、环境感知套件、太阳能电池模块、综合交互套件等,实现月球车、火星车等适合不同行星表面特征的机器人,其中,模块化的设计可以方便自由组装,可编程控制器可以重复编程使用,固定连接件可以指示性安装载荷,简单直接,通用连接件可以自由安装载荷,灵活多变,提高了机器人整体的可扩展性、功能性,使得机器人不在局限于一种结构与功能,使用更加方便、效果更加卓越。
[0052]
上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式。即使对本实用新型作出各种变化,倘若这些变化属于本实用新型权利要求及其等同技术的范围之内,则仍落入在本实用新型的保护范围之中。