1.本发明涉及航空设备技术技术领域,具体涉及一种变形翼并联导轨分布式驱动伸缩机构。
背景技术:
2.传统飞行器固定气动外形无法实现在不同速域和空域下达到最佳气动性能,制约了高速飞行器的发展。通过大范围改变翼面展长,伸缩变形翼能够满足飞行器亚声速、跨声速、超声速巡航及机动对构型的不同需求,使飞行器在飞行的各个阶段都具有良好的综合性能。
3.由于在高速飞行状态下,伸缩翼需要在较短的时间内完成变形,同时承受巨大的气动载荷。这种情况下,对伸缩翼的运动可靠性产生很大的影响。并且高速飞行器变形翼翼型的结构高度较小,现有机构设计已经无法满足高速飞行器变形翼的变形与承载要求,需要有高可靠大容差的伸缩机构实现伸缩翼的导向、承载功能。
4.综上所述,现有高速飞行器变形翼存在无法满足高速飞行器变形翼的变形与承载要求,且无法解决小翼型结构高度与高可靠大容差伸缩机构之间的矛盾的问题。
技术实现要素:
5.本发明的目的是为了解决现有高速飞行器变形翼存在无法满足高速飞行器变形翼的变形与承载要求,且无法解决小翼型结构高度与高可靠大容差伸缩机构之间的矛盾的问题,进而提供一种变形翼并联导轨分布式驱动伸缩机构。
6.本发明的技术方案是:
7.一种变形翼并联导轨分布式驱动伸缩机构,它包括固定翼内板1、固定翼支撑框架2、伸缩翼内板6、伸缩翼支撑框架9、多个双燕尾槽悬臂导轨组件4和多个驱动传动机构5,固定翼内板1内侧与飞行器机体固定连接,固定翼内板1外侧与固定翼支撑框架2固定连接,固定翼支撑框架2中间部位镂空为伸缩翼支撑框架9提供运动空间,固定翼支撑框架2远离固定翼内板1的一侧设有与内部镂空联通的开口,伸缩翼内板6外侧与伸缩翼支撑框架9固定连接,伸缩翼支撑框架9由外向内经开口插设在固定翼支撑框架2内部中间部位镂空处,多个双燕尾槽悬臂导轨组件4沿弦向由右向左依次并排设置在固定翼内板1与伸缩翼内板6之间,每个双燕尾槽悬臂导轨组件4包括双燕尾槽导轨11和两个滑块结构10,双燕尾槽导轨11前端与固定翼内板1固定连接,双燕尾槽导轨11末端悬空,双燕尾槽导轨11两侧分别沿长度方向加工有导轨滑槽,两个滑块结构10的内侧分别与双燕尾槽导轨11两侧的导轨滑槽可滚动连接,两个滑块结构10的外侧分别与固定翼支撑框架2中相对应的两个伸缩翼翼梁8可转动连接,两侧伸缩翼翼梁8将两个滑块结构10压紧于双燕尾槽导轨11上,相邻两个双燕尾槽悬臂导轨组件4之间平行设置有一个多个驱动传动机构5,驱动传动机构5前端与固定翼内板1铰连接,驱动传动机构5移动端与伸缩翼内板6固定连接,在多个驱动传动机构5的同步驱动下使得伸缩翼内板6能够沿着多个双燕尾槽悬臂导轨组件4在固定翼内板1内沿展向实
现伸缩。
8.进一步地,固定翼支撑框架2和伸缩翼支撑框架9均为直角梯形框架结构,伸缩翼支撑框架9包括纵横交错布置的多个伸缩翼翼肋7和多个伸缩翼翼梁8,多个伸缩翼翼肋7沿展向由前至后依次并排设置在伸缩翼内板6的外侧,多个伸缩翼翼梁8沿弦向由右向左依次并排设置在多个伸缩翼翼肋7之间,伸缩翼翼肋7与伸缩翼翼梁8交接处固定连接。
9.进一步地,每个驱动传动机构5包括万向节24、丝杆25、丝母26、电机和联轴器,万向节24前端与穿过固定翼内板1并通过联轴器与电机连接,万向节24后端与丝杆25固定连接,丝母26内侧螺旋安装在丝杆25上,伸缩翼内板6上加工有多个与丝母26相匹配的装配通孔,丝母26外侧插装在伸缩翼内板6的装配通孔内并与伸缩翼内板6固定连接,伸缩翼翼肋7与丝杆25对应位置加工有与丝杆25相匹配的避让通孔,伸缩翼翼肋7与双燕尾槽导轨11对应位置加工有与双燕尾槽导轨11相匹配的避让通槽。
10.进一步地,每个滑块结构10包括两个滑块框架18、三个挡板16、多个子滑块12、多个连接柱13、多个柔性连接结构14和多个滚珠17,多个子滑块12由前至后依次布置,相邻两个子滑块12之间通过柔性连接结构14连接,多个子滑块12靠近双燕尾槽导轨11的一侧端面上沿轴向加工有两排容珠槽a,多个滚珠17分别置于容珠槽内,多个子滑块12的内部沿轴向加工有两个回珠槽15,两个滑块框架18分别安装在边部子滑块12上,且每个滑块框架18靠近子滑块12的一侧端面上加工有两个容珠槽b,两个容珠槽b分别与子滑块12的两个回珠槽15和两个容珠槽a联通,容珠槽a、容珠槽b和两侧回珠槽15之间形成一个完整的滚珠回路,所述滚珠回路内部可滚动设置有若干个滚珠17,相邻两个滚珠17之间接触设置,多个子滑块12远离双燕尾槽导轨11的一侧端面上沿轴向固定有多个连接柱13,每个滑块结构10外侧的伸缩翼翼梁8前端分别加工有多个连接柱装配孔,多个子滑块12通过多个连接柱13可转动安装在两侧伸缩翼翼梁8的多个连接柱装配孔内,双燕尾槽导轨11两侧导轨滑槽均为双燕尾槽,两排容珠槽a中的多个滚珠17分别与双燕尾槽导轨11两侧的双燕尾槽滚动连接。
11.进一步地,它还包括二级悬臂导轨组件3,二级悬臂导轨组件3设置在伸缩翼支撑框架9前缘处对应的固定翼内板1与伸缩翼内板6之间,二级悬臂导轨组件3前端与固定翼内板1固定连接,二级悬臂导轨组件3的末端与伸缩翼内板6及伸缩翼支撑框架9的伸缩翼翼肋固定连接,在多个驱动传动机构5的驱动下使得伸缩翼内板6能够沿着二级悬臂导轨组件3在固定翼内板1内沿展向实现伸缩。
12.进一步地,二级悬臂导轨组件3包括二级导轨21、二级悬臂导轨底座23、两个一级导轨19、两个一级滑块20和两个二级滑块22,二级悬臂导轨底座23前端通过螺钉固定在固定翼内板1上,并排设置的两个一级导轨19前端分别与二级悬臂导轨底座23后端固定连接,两个一级滑块20内侧分别滑动安装在两个一级导轨19上,二级导轨21前端与两个一级滑块20固定连接,两个二级滑块22内侧分别与二级导轨21后端上下两侧滑动连接,两个二级滑块22外侧分别与伸缩翼内板6和伸缩翼翼肋7固定连接。
13.进一步地,伸缩翼翼肋7上加工有若干个减重孔。
14.进一步地,固定翼支撑框架2和伸缩翼支撑框架9表面均布置有防隔热蒙皮。
15.进一步地,所述变形翼并联导轨分布式驱动伸缩机构的主体结构采用高温合金材料。
16.进一步地,双燕尾槽导轨11、一级导轨19、二级导轨21、固定翼支撑框架2和伸缩翼
支撑框架9材料均为高温合金,滚珠17为陶瓷滚珠,滑块框架18和挡板16材料为聚酰亚胺。
17.本发明与现有技术相比具有以下效果:
18.1、本发明的变形翼并联导轨分布式驱动伸缩机构采用多个双燕尾槽悬臂导轨组件并联布置并采用多个驱动传动机构分布式驱动,提高其承载能力的同时还避免可能出现的偏载问题。
19.2、提出的一种伸缩翼双燕尾槽悬臂导轨滑块机构,通过将滑块结构夹紧于双燕尾槽导轨两侧的侧向布置,在保证强度刚度的前提下减小了结构高度,结构高度小,满足翼面尺寸约束;
20.3、本发明通过柔性结构连接多个独立子滑块形成的大容差滑块结构,具有一定的自适应性,在导轨承受较大载荷而产生较大形变时可保证运动可靠性。
21.4、本发明的滑块结构与双燕尾槽导轨之间设置滚珠,且滑块结构内部设置有回珠槽15,使导轨滑块机构原有的滑动摩擦形式变为滚动摩擦形式,有效地减小了运动时的摩擦力;
22.5、本发明通过应用耐高温材料,如双燕尾槽导轨、一级导轨、二级导轨、固定翼支撑框架和伸缩翼支撑框架材料均为高温合金,滚珠为陶瓷滚珠,滑块框架和挡板材料为聚酰亚胺,使得变形翼并联导轨分布式驱动伸缩机构可承受较高的环境温度。
附图说明
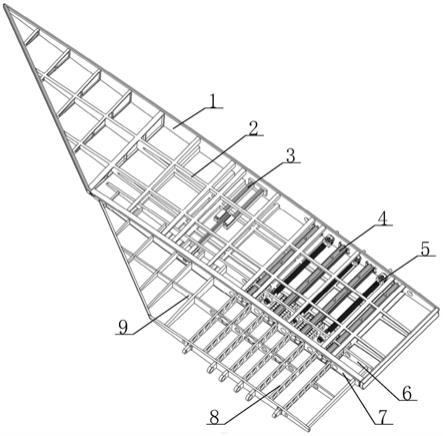
23.图1是本发明一种变形翼并联导轨分布式驱动伸缩机构的结构示意图;
24.图2是本发明双燕尾槽悬臂导轨组件的装配结构示意图;
25.图3是本发明滑块结构的结构示意图;
26.图4是本发明二级悬臂导轨组件的结构示意图;
27.图5是本发明驱动传动机构的结构示意图。
28.图中:1
‑
固定翼内板;2
‑
固定翼支撑框架;3
‑
二级悬臂导轨组件;4
‑
双燕尾槽悬臂导轨组件;5
‑
驱动传动机构;6
‑
伸缩翼内板;7
‑
伸缩翼翼肋;8
‑
伸缩翼翼梁;9
‑
伸缩翼支撑框架;10
‑
两个滑块结构;11
‑
双燕尾槽导轨;12
‑
子滑块;13
‑
连接柱;14
‑
柔性连接结构;15
‑
回珠槽;16
‑
三个挡板;17
‑
滚珠;18
‑
滑块框架;19
‑
一级导轨;20
‑
一级滑块;21
‑
二级导轨;22
‑
二级滑块;23
‑
二级悬臂导轨底座;24
‑
万向节;25
‑
丝杆;26丝母。
具体实施方式
29.具体实施方式一:结合图1至图5说明本实施方式,本实施方式的一种变形翼并联导轨分布式驱动伸缩机构,它包括固定翼内板1、固定翼支撑框架2、伸缩翼内板6、伸缩翼支撑框架9、多个双燕尾槽悬臂导轨组件4和多个驱动传动机构5,固定翼内板1内侧与飞行器机体固定连接,固定翼内板1外侧与固定翼支撑框架2固定连接,固定翼支撑框架2中间部位镂空为伸缩翼支撑框架9提供运动空间,固定翼支撑框架2远离固定翼内板1的一侧设有与内部镂空联通的开口,伸缩翼内板6外侧与伸缩翼支撑框架9固定连接,伸缩翼支撑框架9由外向内经开口插设在固定翼支撑框架2内部中间部位镂空处,多个双燕尾槽悬臂导轨组件4沿弦向由右向左依次并排设置在固定翼内板1与伸缩翼内板6之间,每个双燕尾槽悬臂导轨组件4包括双燕尾槽导轨11和两个滑块结构10,双燕尾槽导轨11前端与固定翼内板1固定连
接,双燕尾槽导轨11末端悬空,双燕尾槽导轨11两侧分别沿长度方向加工有导轨滑槽,两个滑块结构10的内侧分别与双燕尾槽导轨11两侧的导轨滑槽可滚动连接,两个滑块结构10的外侧分别与固定翼支撑框架2中相对应的两个伸缩翼翼梁8可转动连接,两侧伸缩翼翼梁8将两个滑块结构10压紧于双燕尾槽导轨11上,两个滑块结构10置于双燕尾槽导轨11两侧,并可延其长边方向移动,相邻两个双燕尾槽悬臂导轨组件4之间平行设置有一个多个驱动传动机构5,驱动传动机构5前端与固定翼内板1铰连接,驱动传动机构5移动端与伸缩翼内板6固定连接,在多个驱动传动机构5的同步驱动下使得伸缩翼内板6能够沿着多个双燕尾槽悬臂导轨组件4在固定翼内板1内沿展向实现伸缩。
30.具体实施方式二:结合图1和图2说明本实施方式,本实施方式的固定翼支撑框架2和伸缩翼支撑框架9均为直角梯形框架结构,伸缩翼支撑框架9包括纵横交错布置的多个伸缩翼翼肋7和多个伸缩翼翼梁8,多个伸缩翼翼肋7沿展向由前至后依次并排设置在伸缩翼内板6的外侧,多个伸缩翼翼梁8沿弦向由右向左依次并排设置在多个伸缩翼翼肋7之间,伸缩翼翼肋7与伸缩翼翼梁8交接处固定连接。如此设置,伸缩翼内板6、伸缩翼翼肋7和伸缩翼翼梁8可作为整体,相对于固定翼延展向做直线运动。其它组成和连接关系与具体实施方式一相同。
31.具体实施方式三:结合图1和图5说明本实施方式,本实施方式的每个驱动传动机构5包括万向节24、丝杆25、丝母26、电机和联轴器,万向节24前端与穿过固定翼内板1并通过联轴器与电机连接,万向节24后端与丝杆25固定连接,丝母26内侧螺旋安装在丝杆25上,伸缩翼内板6上加工有多个与丝母26相匹配的装配通孔,丝母26外侧插装在伸缩翼内板6的装配通孔内并与伸缩翼内板6固定连接,伸缩翼翼肋7与丝杆25对应位置加工有与丝杆25相匹配的避让通孔,伸缩翼翼肋7与双燕尾槽导轨11对应位置加工有与双燕尾槽导轨11相匹配的避让通槽。如此设置,分布式电机提供旋转驱动输入,丝母26内侧与丝杆25螺旋连接,将其旋转运动转化成自身直线运动,进而带动伸缩翼实现伸缩运动;同时与伸缩翼内板6固定连接的多个双燕尾槽悬臂导轨组件4进行随动运动,在实现伸缩变形功能的同时提供支撑与承载能力。其它组成和连接关系与具体实施方式一或二相同。
32.具体实施方式四:结合图1至图3说明本实施方式,本实施方式的每个滑块结构10包括两个滑块框架18、三个挡板16、多个子滑块12、多个连接柱13、多个柔性连接结构14和多个滚珠17,多个子滑块12由前至后依次布置,相邻两个子滑块12之间通过柔性连接结构14连接,多个子滑块12靠近双燕尾槽导轨11的一侧端面上沿轴向加工有两排容珠槽a,多个滚珠17分别置于容珠槽内,多个子滑块12的内部沿轴向加工有两个回珠槽15,两个滑块框架18分别安装在边部子滑块12上,且每个滑块框架18靠近子滑块12的一侧端面上加工有两个容珠槽b,两个容珠槽b分别与子滑块12的两个回珠槽15和两个容珠槽a联通,容珠槽a、容珠槽b和两侧回珠槽15之间形成一个完整的滚珠回路,所述滚珠回路内部可滚动设置有若干个滚珠17,相邻两个滚珠17之间接触设置,多个子滑块12远离双燕尾槽导轨11的一侧端面上沿轴向固定有多个连接柱13,每个滑块结构10外侧的伸缩翼翼梁8前端分别加工有多个连接柱装配孔,多个子滑块12通过多个连接柱13可转动安装在两侧伸缩翼翼梁8的多个连接柱装配孔内,双燕尾槽导轨11两侧导轨滑槽均为双燕尾槽,两排容珠槽a中的多个滚珠17分别与双燕尾槽导轨11两侧的双燕尾槽滚动连接。如此设置,双燕尾槽导轨11侧面的双燕尾槽与对应滑块结构10内的滚珠17接触。采用挡板16将滚珠17约束在子滑块12内侧容珠
槽a内,挡板16约束内侧滚珠17的运动方向,两个滑块框架18内侧容珠槽b分别与容珠槽a和子滑块12内部回珠槽15联通,使得滚珠17可实现循环滚动。各子滑块与连接柱13固定连接,各连接柱13与伸缩翼翼梁8上的连接柱装配孔转动连接,二者具有一定的旋转自由度,子滑块可以绕连接柱13小幅度转动。悬臂导轨滑块机构实现大容差、大承载的直线运动导向功能,进而实现伸缩翼的变展长功能。其它组成和连接关系与具体实施方式一、二或三相同。
33.具体实施方式五:结合图1和图4说明本实施方式,本实施方式还包括二级悬臂导轨组件3,二级悬臂导轨组件3设置在伸缩翼支撑框架9前缘处对应的固定翼内板1与伸缩翼内板6之间,二级悬臂导轨组件3前端与固定翼内板1固定连接,二级悬臂导轨组件3的末端与伸缩翼内板6及伸缩翼支撑框架9的伸缩翼翼肋固定连接,在多个驱动传动机构5的驱动下使得伸缩翼内板6能够沿着二级悬臂导轨组件3在固定翼内板1内沿展向实现伸缩。如此设置,由于伸缩翼支撑框架9前缘展向较短,无法容纳双燕尾槽悬臂导轨组件4,所以伸缩翼支撑框架9前缘处采用二级悬臂导轨组件3;分布式电机提供旋转驱动输入,丝母26内侧与丝杆25螺旋连接,将其旋转运动转化成自身直线运动,进而带动伸缩翼实现伸缩运动;同时与伸缩翼内板6固定连接的二级悬臂导轨组件3进行随动运动,在实现伸缩变形功能的同时提供支撑与承载能力。其它组成和连接关系与具体实施方式一、二、三或四相同。
34.具体实施方式六:结合图1和图4说明本实施方式,本实施方式的二级悬臂导轨组件3包括二级导轨21、二级悬臂导轨底座23、两个一级导轨19、两个一级滑块20和两个二级滑块22,二级悬臂导轨底座23前端通过螺钉固定在固定翼内板1上,并排设置的两个一级导轨19前端分别与二级悬臂导轨底座23后端固定连接,两个一级滑块20内侧分别滑动安装在两个一级导轨19上,二级导轨21前端与两个一级滑块20固定连接,两个二级滑块22内侧分别与二级导轨21后端上下两侧滑动连接,两个二级滑块22外侧分别与伸缩翼内板6和伸缩翼翼肋7固定连接。如此设置,一级滑块20可沿一级导轨19长边方向移动,二级滑块22可沿二级导轨21长边方向移动。其它组成和连接关系与具体实施方式一、二、三、四或五相同。
35.具体实施方式七:结合图1和图2说明本实施方式,本实施方式的伸缩翼翼肋7上加工有若干个减重孔。如此设置,在伸缩翼翼肋7上加工减重孔的目的是为了减轻伸缩翼支撑框架9的重量,实现伸缩翼轻量化。其它组成和连接关系与具体实施方式一、二、三、四、五或六相同。
36.具体实施方式八:结合图1说明本实施方式,本实施方式的固定翼支撑框架2和伸缩翼支撑框架9表面均布置有防隔热蒙皮。如此设置,在固定翼支撑框架2和伸缩翼支撑框架9表面布置防隔热蒙皮的目的是为了克服极端条件对变形翼带来的影响,可承受较高的环境温度。其它组成和连接关系与具体实施方式一、二、三、四、五、六或七相同。
37.具体实施方式九:结合图1说明本实施方式,本实施方式的所述变形翼并联导轨分布式驱动伸缩机构的主体结构采用高温合金材料。如此设置,使得变形翼并联导轨分布式驱动伸缩机构可承受较高的环境温度。其它组成和连接关系与具体实施方式一、二、三、四、五、六、七或八相同。
38.具体实施方式十:结合图1至图4说明本实施方式,本实施方式的双燕尾槽导轨11、一级导轨19、二级导轨21、固定翼支撑框架2和伸缩翼支撑框架9材料均为高温合金,滚珠17为陶瓷滚珠,滑块框架18和挡板16材料为聚酰亚胺。如此设置,使得变形翼并联导轨分布式驱动伸缩机构可承受较高的环境温度。其它组成和连接关系与具体实施方式的一、二、三、
四、五、六、七、八或九相同。
39.工作原理
40.结合图1至图5说明本发明的变形翼并联导轨分布式驱动伸缩机构的工作原理:工作时,分布式电机对驱动传动机构5提供旋转驱动输入,丝母26内侧与丝杆25螺旋连接,将其旋转运动转化成自身直线运动,进而带动伸缩翼实现伸缩运动;与此同时,一方面,与伸缩翼内板6固定连接的多个双燕尾槽悬臂导轨组件4进行随动运动;另一方面,与伸缩翼内板6固定连接的二级悬臂导轨组件3进行随动运动,在实现伸缩变形功能的同时提供支撑与承载能力。
41.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。