1.本发明属于无人机技术领域,具体地说是一种可多地形降落的无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行,回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收,可反复使用多次,广泛用于空中侦察、监视、通信、反潜、电子干扰等;
3.现有技术中也出现了一些关于无人机的技术方案,如申请公布号为cn107416177a的一项中国专利公开了一种仿生球形结构无人机,仿照瓢虫的翅翘结构对无人机的四分之一球状壳体进行优化设计,机臂壳体边缘较中间厚度较厚,在保证结构强度的基础上进行适当镂空处理,使得无人机壳体的整体重量最小化;独特的自动展开结构设计,使得无人机可以从折叠状态到展开状态迅速转换,从而保证无人机支持多种起飞方式;独特的机身外形及内部中空结构设计,除了保证无人机在折叠状态向展开状态过程中的姿态自稳,而且使得无人机可以在海面降落,并且无人机一部分处于水下状态,一部分浮在液面以上,方便无人机实现多次水面起降;无人机的旋翼采用多叶桨结构,充分利用无人机折叠状态的球形内部空间,以上发明方案中,通过改变无人机形态,实现多形态和多环境的起飞,并没有考虑多环境降落的需求,起飞、降落是无人机操作的重要步骤,技术方案不完整。
4.针对上述发明中的问题,现有的无人机在底部设置有降落支架,在降落是,支架实现对无人机的支撑,只能适配于平地使用,在降落环境复杂时,不能完成安全着陆的需求,不能使用多种复杂降落环境,就限制了无人机的使用范围场景,不利于无人机的发展。
5.为此,本发明提供一种可多地形降落的无人机,为此,我们提出一种可多地形降落的无人机。
技术实现要素:
6.为了弥补现有技术的不足,解决在降落环境复杂时,不能完成安全着陆的需求,不能使用多种复杂降落环境,就限制了无人机的使用范围场景,不利于无人机的发展的问题,本发明提出的一种可多地形降落的无人机。
7.本发明解决其技术问题所采用的技术方案是:本发明所述的一种可多地形降落的无人机,包括机身、展翼、旋转风翅和动力马达,所述机身上安装有展翼,所述展翼上安装有动力马达,所述动力马达的作用端安装有旋转风翅,所述展翼的底侧竖直固定有固定杆,所述固定杆的底端通过销轴配合安装有连接座,所述销轴上配合套装有簧片,所述连接座上固定有活动筒,所述活动筒的内部穿插有弧形支撑脚,所述弧形支撑脚的顶端固定有限位帽,所述限位帽与活动筒的顶部端口之间固接有第一弹簧,所述活动筒上固定有气囊盒,所
述气囊盒的内部填充有气囊。
8.优选的,所述气囊盒的一侧盒壁上开设有开口,所述开口处固接有磁力环,所述气囊的底部粘贴固定在气囊盒的内壁上,所述气囊上顶部粘贴有磁力塞,所述磁力塞与磁力环为异性磁力配合构件,能够在气囊没有充气时,实现对气囊的收纳。
9.优选的,所述固定杆的顶部横向固定有连接杆,所述连接杆上固定有固定盒,所述固定盒的内部设置有收卷腔和储纳腔,所述收卷腔的内部通过轴承配合安装有卷轴,所述卷轴上套设有网格卷,所述卷轴的两端套装有发条,其中所述卷轴的一端贯穿储纳腔的腔壁,所述卷轴的一端固定有绞盘,所述储纳腔内固定有第一气罐,所述第一气罐的底端固定有第一排气管,所述第一排气管的底端横向固定有阻流管,所述阻流管的内部设置有活动塞,所述活动塞与阻流管的一端内壁之间固接有第二弹簧,所述阻流管的底部固接有第二排气管。
10.优选的,所述第一排气管与第二排气管沿同一直线设置,所述第一排气管和第二排气管与阻流管连通,能够实现进气的贯通。
11.优选的,所述阻流管的另一端管壁上开设有线孔,所述线孔内穿设有弹力绳,所述弹力绳的一端固定在活动塞上,所述弹力绳的另一端绑定在绞盘上,所述固定盒的底侧扣装有防护罩,能够配合实现跌落保护动作。
12.优选的,所述机身上呈“x”型固定有四个展翼,所述展翼上均安装有固定盒,所述固定盒内分别设置有网格卷,两相邻所述展翼上的网格卷缠绕防护网。
13.优选的,所述第二排气管与气囊通过导气管连接,能够配合实现浮水保护作业。
14.优选的,所述机身的底侧固定有第二气罐,所述第二气罐的底侧中间位置固定有中转盒,所述中转盒的底端固接有连接筒,所述连接筒的底端固定有顶升罩,所述中转盒的底侧壁和顶升罩上均开设有杆孔,所述顶升杆贯穿杆孔内,所述顶升杆的顶端固定有气塞球,所述顶升杆的底端固定有浮力板。
15.优选的,所述气塞球设置在中转盒内,所述中转盒的侧壁上安装有导流管,所述导流管的端口与气塞球的表面相切,所述导流管与气囊通过导管连通。
16.与现有技术相比,本发明的有益效果如下:
17.本发明所述的一种可多地形降落的无人机,活动筒的内部穿插有弧形支撑脚,弧形支撑脚的顶端固定有限位帽,限位帽与活动筒的顶部端口之间固接有第一弹簧,在无人机降落时,弧形支撑脚的底端首先接触地面,在第一弹簧的配合下,能够实现对降落的冲击力进行缓冲,将弧形支撑脚的底部设置为锥形,能够在降落后,提高抓地力,避免侧滑翻转,在降落过程中,连接座为活动结构,能够更好地适配各种角度的降落,同时达到缓冲的效果,能够更好地适配各种降落地形;
18.两相邻展翼上的网格卷缠绕防护网,第二排气管与气囊通过导气管连接,在降落后发生侧倾,在跌落过程中,地面杂物首先与防护网接触,在防护网的保护下,能够实现对机身的保护,保证重要部件不受损,在防护网在挤压拉伸时,网格卷旋转,带动卷轴旋转,实现对防护网的释放,在卷轴旋转时,打动绞盘旋转,实现对弹性绳的收卷,在弹力绳收紧后自动绷断,释放活动塞,第一排气管和第二排气管通过阻流管连接贯通,第一气罐的气体瞬间冲入气囊内,实现气囊内的膨胀,能够在无人机跌落过程中,配合实现对无人机的保护,能够减缓冲击,增加体积结构,能够减缓翻转,降低对无人机的损坏;
19.在掉落在水面时,浮力板受到浮力作业,能够在顶升杆的配合下实现对气塞球的顶升,在顶升后,导流管与气塞球之间产生缝隙,第二气罐的气体通过导流管和导气管输入气囊,气囊膨胀,能够实现对无人机的托举,达到保护目的,能够实现多区域的降落需求。
附图说明
20.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
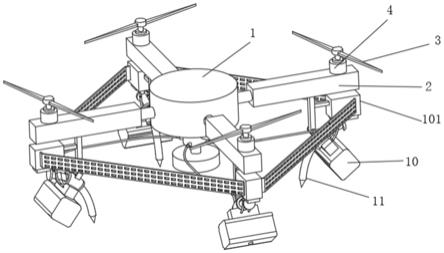
21.图1是本发明的整体俯视立体图;
22.图2是本发明的整体正视立体图;
23.图3是本发明的整体仰视立体图;
24.图4是本发明的整体主视剖视图;
25.图5是本发明中图4中的a区域结构图;
26.图6是本发明中图4中的b区域结构图;
27.图7是本发明中图4中的c区域结构图;
28.图中:1、机身;2、展翼;3、旋转风翅;4、动力马达;5、固定杆;6、连接杆;7、限位帽;8、第一弹簧;9、磁力塞;10、气囊;11、弧形支撑脚;12、活动筒;13、簧片;14、气囊盒;15、磁力环;101、固定盒;102、第一气罐;103、第一排气管;104、第二弹簧;105、活动塞;106、第二排气管;107、防护罩;108、绞盘;109、网格卷;110、卷轴;111、发条;201、第二气罐;202、中转盒;203、导流管;204、连接筒;205、浮力板;206、顶升杆;207、顶升罩;208、气塞球。
具体实施方式
29.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
30.如图1至图7所示,本发明所述的一种可多地形降落的无人机,包括机身1、展翼2、旋转风翅3和动力马达4,机身1上安装有展翼2,展翼2上安装有动力马达4,动力马达4的作用端安装有旋转风翅3,展翼2的底侧竖直固定有固定杆5,固定杆5的底端通过销轴配合安装有连接座,销轴上配合套装有簧片13,连接座上固定有活动筒12,活动筒12的内部穿插有弧形支撑脚11,弧形支撑脚11的顶端固定有限位帽7,限位帽7与活动筒12的顶部端口之间固接有第一弹簧8,活动筒12上固定有气囊盒14,气囊盒14的内部填充有气囊10,气囊盒14的一侧盒壁上开设有开口,开口处固接有磁力环15,气囊10的底部粘贴固定在气囊盒14的内壁上,气囊10上顶部粘贴有磁力塞9,磁力塞9与磁力环15为异型磁力配合构件,在无人机降落时,弧形支撑脚11的底端首先接触地面,在第一弹簧8的配合下,能够实现对降落的冲击力进行缓冲,将弧形支撑脚11的底部设置为锥形,能够在降落后,提高抓地力,避免侧滑翻转,在降落过程中,连接座为活动结构,能够更好地适配各种角度的降落,同时达到缓冲的效果,能够更好地适配各种降落地形。
31.固定杆5的顶部横向固定有连接杆6,连接杆6上固定有固定盒101,固定盒101的内部设置有收卷腔和储纳腔,收卷腔的内部通过轴承配合安装有卷轴110,卷轴110上套设有网格卷109,卷轴110的两端套装有发条111,其中卷轴110的一端贯穿储纳腔的腔壁,卷轴110的一端固定有绞盘108,储纳腔内固定有第一气罐102,第一气罐102的底端固定有第一排气管103,第一排气管103的底端横向固定有阻流管,阻流管的内部设置有活动塞105,活
动塞105与阻流管的一端内壁之间固接有第二弹簧104,阻流管的底部固接有第二排气管106,第一排气管103与第二排气管106沿同一直线设置,第一排气管103和第二排气管106与阻流管连通,阻流管的另一端管壁上开设有线孔,线孔内穿设有弹力绳,弹力绳的一端固定在活动塞105上,弹力绳的另一端绑定在绞盘108上,固定盒101的底侧扣装有防护罩107,机身1上呈“x”型固定有四个展翼2,展翼2上均安装有固定盒101,固定盒101内分别设置有网格卷109,两相邻展翼2上的网格卷109缠绕防护网,第二排气管106与气囊10通过导气管连接,作业时,在降落后发生侧倾,在跌落过程中,地面杂物首先与防护网接触,在防护网的保护下,能够实现对机身1的保护,保证重要部件不受损,在防护网在挤压拉伸时,网格卷109旋转,带动卷轴110旋转,实现对防护网的释放,在卷轴110旋转时,打动绞盘108旋转,实现对弹性绳的收卷,在弹力绳收紧后自动绷断,释放活动塞105,第一排气管103和第二排气管106通过阻流管连接贯通,第一气罐102的气体瞬间冲入气囊10内,实现气囊10内的膨胀,能够在无人机跌落过程中,配合实现对无人机的保护,能够减缓冲击,增加体积结构,能够减缓翻转,降低对无人机的损坏。
32.机身1的底侧固定有第二气罐201,第二气罐201的底侧中间位置固定有中转盒202,中转盒202的底端固接有连接筒204,连接筒204的底端固定有顶升罩207,中转盒202的底侧壁和顶升罩207上均开设有杆孔,顶升杆206贯穿杆孔内,顶升杆206的顶端固定有气塞球208,顶升杆206的底端固定有浮力板205,气塞球208设置在中转盒202内,中转盒202的侧壁上安装有导流管203,导流管203的端口与气塞球208的表面相切,导流管203与气囊10通过导管连通,作业时,浮力板205受到浮力作业,能够在顶升杆206的配合下实现对气塞球208的顶升,在顶升后,导流管203与气塞球208之间产生缝隙,第二气罐201的气体通过导流管203和导气管输入气囊10,气囊10膨胀,能够实现对无人机的托举,达到保护目的,能够实现多区域的降落需求。
33.工作时,展翼2的底侧竖直固定有固定杆5,固定杆5的底端通过销轴配合安装有连接座,销轴上配合套装有簧片13,连接座上固定有活动筒12,活动筒12的内部穿插有弧形支撑脚11,弧形支撑脚11的顶端固定有限位帽7,限位帽7与活动筒12的顶部端口之间固接有第一弹簧8,在无人机降落时,弧形支撑脚11的底端首先接触地面,在第一弹簧8的配合下,能够实现对降落的冲击力进行缓冲,将弧形支撑脚11的底部设置为锥形,能够在降落后,提高抓地力,避免侧滑翻转,在降落过程中,连接座为活动结构,能够更好地适配各种角度的降落,同时达到缓冲的效果,能够更好地适配各种降落地形;
34.在使用时,在机身1上呈“x”型固定有四个展翼2,展翼2上均安装有固定盒101,固定盒101内分别设置有网格卷109,两相邻展翼2上的网格卷109缠绕防护网,第二排气管106与气囊10通过导气管连接,在降落后发生侧倾,在跌落过程中,地面杂物首先与防护网接触,在防护网的保护下,能够实现对机身1的保护,保证重要部件不受损,在防护网在挤压拉伸时,网格卷109旋转,带动卷轴110旋转,实现对防护网的释放,在卷轴110旋转时,打动绞盘108旋转,实现对弹性绳的收卷,在弹力绳收紧后自动绷断,释放活动塞105,第一排气管103和第二排气管106通过阻流管连接贯通,第一气罐102的气体瞬间冲入气囊10内,实现气囊10内的膨胀,能够在无人机跌落过程中,配合实现对无人机的保护,能够减缓冲击,增加体积结构,能够减缓翻转,降低对无人机的损坏;
35.在掉落在水面时,浮力板205受到浮力作业,能够在顶升杆206的配合下实现对气
塞球208的顶升,在顶升后,导流管203与气塞球208之间产生缝隙,第二气罐201的气体通过导流管203和导气管输入气囊10,气囊10膨胀,能够实现对无人机的托举,达到保护目的,能够实现多区域的降落需求。
36.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
37.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。