1.本发明涉及一种数据采集保护装置技术领域,具体是一种实时数据采集系统。
背景技术:
2.微型旋翼无人机针对地面控制系统和机载测控通信系统,地面控制系统是能够对无人机的飞行姿态进行监测和指令控制,机载测控通信系统主要是在无人机飞行状态下对惯性传感器、超声波测距仪等进行数据采集,并把这些数据传送给地面控制系统。
3.目前有的无人机在一些狭小巷道环境下使用,有的虽然能够在无人机外侧设置防护机构,保障无人机稳定进行数据采集工作,但是该层防护机构只是起到缓冲的作用,对无人机保护的效果较低。
技术实现要素:
4.本发明的目的在于提供一种实时数据采集系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种实时数据采集系统,包括机体,所述机体外侧设有四个飞行桨机构,四个所述飞行桨机构外侧均设有防护圈,所述防护圈与所述机体固定连接,所述机体内侧设有控制模块,所述控制模块与所述飞行桨机构信号连接,所述防护圈外侧设有自主防护组件,所述自主防护组件包括外保护圈、冲击板、两个固定套和两个电机,两个所述固定套内均滑动连接有连杆,用于实现定位的目的,两个所述电机输出端均固定连接有限位杆,所述限位杆插接在所述冲击板内,用于实现限位的目的;所述冲击板外侧设有感应圈,所述外保护圈内固定连接有与所述感应圈相对应的接近传感器,用于检测所述外保护圈是否出现碰撞的目的;所述控制模块与所述接近传感器、所述电机信号连接。
6.作为本发明再进一步的方案:所述机体内侧设有数据采集模块、信息传输模块、第一储存模块和第二储存模块,所述数据采集模块与所述控制模块信号连接,所述信息传输模块与所述第一储存模块、第二储存模块信号连接。
7.作为本发明再进一步的方案:所述外保护圈为聚氨酯材质,且所述外保护圈开设有与所述冲击板相配合的脱出槽。
8.作为本发明再进一步的方案:两个所述固定套均固定在所述外保护圈内,且所述连杆固定在所述冲击板上,所述连杆一端固定连接有限位板,所述限位板滑动在所述固定套内。
9.作为本发明再进一步的方案:所述固定套内侧设有弹簧,所述弹簧一端固定在所述固定套内,所述弹簧另一端固定在所述限位板上。
10.作为本发明再进一步的方案:两个所述电机分别分布在两个所述固定套外侧,且所述电机固定在所述外保护圈内。
11.作为本发明再进一步的方案:所述冲击板开设有两个限位槽,两个所述限位杆分
别位于两个所述限位槽内,且所述限位槽开设有两个横槽,两个所述横槽分别与两个所述限位槽连通。
12.作为本发明再进一步的方案:所述接近传感器的数量为十二个,每个所述外保护圈内均设有三个所述接近传感器,三个所述接近传感器均匀分布在所述外保护圈内,且所述感应圈与所述外保护圈固定连接。
13.作为本发明再进一步的方案,一种实时数据采集系统,所述使用步骤如下:a:首先机体受到飞行桨机构的作用起飞,并由数据采集模块进行数据采集,通过第一储存模块和第二储存模块保存数据采集模块收集的数据,最后可以通过信息传输模块将采集的数据信息进行传输。
14.b:在机体起飞进行数据采集的过程中,若出现碰撞的现象,则撞击物会对外保护圈施加作用力,此时外保护圈挤压,使感应圈的位置改变,接触到接近传感器,接近传感器收到信号并将信号传递给电机,电机启动,使限位杆旋转,解除对冲击板的限制,使冲击板能够从脱出槽脱出,作用在撞击物上,使冲击板能够施加一个反作用力给撞击物,降低了机体受到的损失。
15.与现有技术相比,本发明的有益效果是:1、通过设置的自主防护组件包括外保护圈、冲击板、两个固定套和两个电机,在机体起飞进行数据采集的过程中,若出现碰撞的现象,则撞击物会对外保护圈施加作用力,此时外保护圈挤压,外保护圈进行一次缓冲,使感应圈的位置改变,接触到接近传感器,接近传感器收到信号并将信号传递给电机,电机启动,使限位杆旋转,解除对冲击板的限制,使冲击板能够从脱出槽脱出,作用在撞击物上,使冲击板能够施加一个反作用力给撞击物,同时弹簧进行缓冲,降低了机体受到的损失,进行二次保护,使机体防护效果好,保障无人机稳定进行数据采集工作。
16.2、通过设置的固定套和连杆,在冲击板运动时,能够连杆在固定套内滑动,能够定位着冲击板运动的位置,并且冲击板在不使用时,可以在弹簧的作用下压缩在外保护圈内,不影响机体的体积,使装置使用的效果好。
17.3、通过在每个外保护圈内均设有三个接近传感器,三个接近传感器均匀分布在外保护圈内,使接近传感器分布在外保护圈每个均匀的位置点处,若外保护圈受力,易使接近传感器接收信号,控制电机启动,实现自主防护的目的。
附图说明
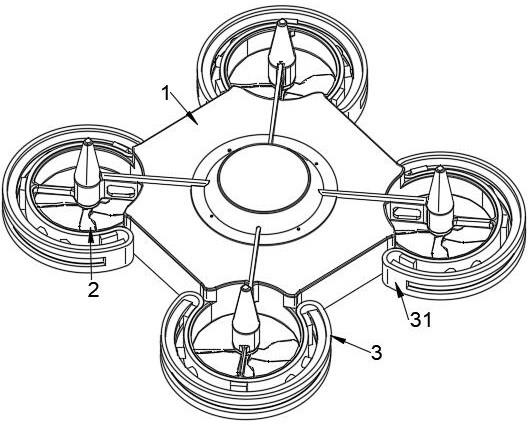
18.图1为一种实时数据采集系统的结构示意图;图2为一种实时数据采集系统中机体内部的结构示意图;图3为一种实时数据采集系统中的系统图;图4为一种实时数据采集系统中自主防护组件的结构示意图;图5为一种实时数据采集系统中外保护圈的结构示意图;图6为一种实时数据采集系统中限位杆的结构示意图;图7为一种实时数据采集系统中固定套内部的结构示意图。
19.图中:1、机体;11、控制模块;12、数据采集模块;13、信息传输模块;14、第一储存模块;15、第二储存模块;2、飞行桨机构;21、防护圈;3、自主防护组件;31、外保护圈;311、脱出
槽;32、冲击板;321、限位槽;322、横槽;33、固定套;34、连杆;341、限位板;35、弹簧;4、感应圈;5、接近传感器;6、电机;61、限位杆。
具体实施方式
20.请参阅图1~7,本发明实施例中,一种实时数据采集系统,包括机体1,机体1外侧设有四个飞行桨机构2,四个飞行桨机构2外侧均设有防护圈21,防护圈21与机体1固定连接,机体1内侧设有控制模块11,控制模块11与飞行桨机构2信号连接,防护圈21外侧设有自主防护组件3,自主防护组件3包括外保护圈31、冲击板32、两个固定套33和两个电机6,两个固定套33内均滑动连接有连杆34,用于实现定位的目的,两个电机6输出端均固定连接有限位杆61,限位杆61插接在冲击板32内,用于实现限位的目的;冲击板32外侧设有感应圈4,外保护圈31内固定连接有与感应圈4相对应的接近传感器5,用于检测外保护圈31是否出现碰撞的目的;控制模块11与接近传感器5、电机6信号连接。
21.在图2和图3中:机体1内侧设有控制模块11,控制模块11与飞行桨机构2信号连接,通过开启和关闭飞行桨机构2,分别用来控制机体1的飞行和降落,控制模块11与接近传感器5、电机6信号连接,机体1内侧设有数据采集模块12、信息传输模块13、第一储存模块14和第二储存模块15,数据采集模块12与控制模块11信号连接,信息传输模块13与第一储存模块14、第二储存模块15信号连接,机体1受到飞行桨机构2的作用起飞,并由数据采集模块12进行数据采集,通过第一储存模块14和第二储存模块15保存数据采集模块12收集的数据,最后可以通过信息传输模块13将采集的数据信息进行传输,第一储存模块14和第二储存模块15均能够储存收集的数据信息,储存量大,可以提高机体1使用的效果,信息传输模块13能够把这些数据传送给地面控制系统。
22.在图1、图4、图5、图6和图7中:四个飞行桨机构2外侧均设有防护圈21,防护圈21与机体1固定连接,防护圈21对飞行桨机构2进行保护,防护圈21外侧设有自主防护组件3,自主防护组件3包括外保护圈31、冲击板32、两个固定套33和两个电机6,外保护圈31为聚氨酯材质,且外保护圈31开设有与冲击板32相配合的脱出槽311,若机体1在使用时,出现碰撞的现象,外保护圈31能够进行一次缓冲,冲击板32从脱出槽311脱出,进行第二次缓冲,两个固定套33内均滑动连接有连杆34,用于实现定位的目的,两个固定套33均固定在外保护圈31内,且连杆34固定在冲击板32上,连杆34一端固定连接有限位板341,限位板341滑动在固定套33内,固定套33内侧设有弹簧35,弹簧35一端固定在固定套33内,弹簧35另一端固定在限位板341上,当冲击板32脱出时,连杆34能够在固定套33内运动,限位板341限制着连杆34运动的位置,连杆34在固定套33内滑动,能够定位着冲击板32运动的位置,使机体1稳定使用,弹簧35复位的同时,冲击板32运动,即对机体1实现二次保护的目的,并且冲击板32在不使用时,可以在弹簧35的作用下压缩在外保护圈31内,不影响机体1的体积,使装置使用的效果好,接近传感器5的数量为十二个,每个外保护圈31内均设有三个接近传感器5,三个接近传感器5均匀分布在外保护圈31内,且感应圈4与外保护圈31固定连接,冲击板32外侧设有感应圈4,感应圈4是为具有弹性的材质,外保护圈31内固定连接有与感应圈4相对应的接近传感器5,用于检测外保护圈31是否出现碰撞的目的;控制模块11与接近传感器5、电机6信号连接,接近传感器5用于接收信号,并将信号反馈给电机6,使在电机6需要使用的时候启动,通过在每个外保护圈31内均设有三个接近传感器5,三个接近传感器5均匀分布在外保
护圈31内,使接近传感器5分布在外保护圈31每个均匀的位置点处,若外保护圈31受力,易使接近传感器5接收信号,控制电机6启动,实现自主防护的目的,两个电机6输出端均固定连接有限位杆61,限位杆61插接在冲击板32内,用于实现限位的目的,两个电机6分别分布在两个固定套33外侧,且电机6固定在外保护圈31内,冲击板32开设有两个限位槽321,两个限位杆61分别位于两个限位槽321内,且限位槽321开设有两个横槽322,两个横槽322分别与两个限位槽321连通,当电机6启动,使限位杆61能够旋转运动出限位槽321,连杆34与横槽322对应时,限位杆61解除对冲击板32的限制,使冲击板32能够从脱出槽311脱出,作用在撞击物上,使冲击板32能够施加一个反作用力给撞击物,同时弹簧35进行缓冲,降低了机体1受到的损失,进行二次保护,使机体1防护效果好,保障无人机稳定进行数据采集工作,当冲击板32回缩时,将限位杆61旋转至限位槽321内,限制着冲击板32的位置,同时在弹簧35的作用下,能够使冲击板32稳定的位于外保护圈31内,使冲击板32隐藏在外保护圈31内,不影响机体1的体积,便于机体1的运输和携带。
23.如图1
‑
图7所示,本发明还提供一种实时数据采集系统的使用方法,所示具体步骤如下:a:首先机体1受到飞行桨机构2的作用起飞,并由数据采集模块12进行数据采集,通过第一储存模块14和第二储存模块15保存数据采集模块12收集的数据,最后可以通过信息传输模块13将采集的数据信息进行传输。
24.b:在机体1起飞进行数据采集的过程中,若出现碰撞的现象,则撞击物会对外保护圈31施加作用力,此时外保护圈31挤压,使感应圈4的位置改变,接触到接近传感器5,接近传感器5收到信号并将信号传递给电机6,电机6启动,使限位杆61旋转,解除对冲击板32的限制,使冲击板32能够从脱出槽311脱出,作用在撞击物上,使冲击板32能够施加一个反作用力给撞击物,降低了机体1受到的损失。
25.本发明的工作原理是:使用时,机体1外部设有遥控器,通过遥控器开启飞行桨机构2,机体1受到飞行桨机构2的作用起飞,并由数据采集模块12进行实时数据采集,通过第一储存模块14和第二储存模块15保存数据采集模块12收集的数据,第一储存模块14和第二储存模块15均能够储存收集的数据信息,储存量大,便于对信息进行处理,最后可以通过信息传输模块13将采集的数据信息进行传输,把这些数据传送给地面控制系统,在机体1起飞进行数据采集的过程中,若出现碰撞的现象,则撞击物会对外保护圈31施加作用力,此时外保护圈31挤压,外保护圈31进行一次缓冲,使感应圈4的位置改变,接触到接近传感器5,接近传感器5收到信号并将信号传递给电机6,电机6启动,带动限位杆61旋转,使限位杆61能够旋转运动出限位槽321,连杆34与横槽322对应时,限位杆61解除对冲击板32的限制,使冲击板32能够在弹簧35的作用下从脱出槽311脱出,作用在撞击物上,使冲击板32能够施加一个反作用力给撞击物,同时弹簧35进行缓冲,降低了机体1受到的损失,进行二次保护,使机体1防护效果好,当冲击板32回缩时,将限位杆61旋转至限位槽321内,限制着冲击板32的位置,同时在弹簧35的作用下,能够使冲击板32稳定的位于外保护圈31内,能够不影响机体1的体积。
26.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。