1.本发明涉及防爆设备技术领域,具体涉及一种煤矿下防爆无人机及引线方法。
背景技术:
2.中国的煤矿资源十分丰富,同时也是中国主要的消耗能源。煤矿的大量开采也带来了大量的煤矿安全问题。为了保证矿山的生产安全和高效运行,工人们每日需要对井下巷道井下安全巡视检查,及时发现事故隐患和险情,该项工作劳动强度大且危险。结合机器人逐步替代矿工完成高危作业任务,可极大程度地降低煤矿安全事故的发生率,同时也可进一步提高生产效率。而无人机具有灵活多变、巡检速度快及监测范围等优点。在无人机平台上搭载高清摄像装置及多种传感器,可以执行诸多井下任务巡检任务,如巷道变形监测、渗水漏水检测、环境参数监测以及煤矿发生事故后的快速应急救援监测等。目前,矿井巡检无人机等安控类机器人的研究还处于起步阶段。
3.煤矿井下环境复杂,有易燃易爆气体,因此在煤矿井下工作的设备都要满足防爆要求。现有的煤矿井下防爆设备体积重量都比较大,而无人机负载有限同时又要满足续航的要求,因此其设计思路无法应用于防爆设计。在无人机的防爆设计中电缆的排布对防爆结构影响很大,而防爆结构又决定着无人机整体的重量。因此无人机的防爆引线方式设计在无人机整体的防爆设计占有重要的地位。
4.由此可见,现急需提供一种新的防爆引线方法来提高无人机的安全性为本领域需解决的问题。
技术实现要素:
5.针对于现有防爆无人机存在安全性低的技术问题,本方案的目的在于提供一种煤矿下防爆无人机的引线方法,其通过将动力源的电缆引出至控制器中,对控制器进行供电;控制器中的若干信号线缆进行转换后分别引出给外部的传感器,外部的传感器分别通过信号线缆与控制器进行信号交互;同时控制器中的电缆引出给驱动件,驱动件驱动无人机的旋翼进行旋转;此引线方式可以增加设备运行的安全性,在此基础上,为配合此引线方式,本方案还给出了无人机设备的结构方案,很好地克服了现有技术所存在的问题。
6.为了达到上述目的,本发明提供的一种煤矿下防爆无人机,包括若干第一腔体,若干第二腔体,若干第三腔体和第四腔体;所述若干第一腔体,若干第二腔体,若干第三腔体以第四腔体为中心对称设置;所述防爆无人机还包括设置于第一腔体内部的动力元件,设置于第二腔体与第四腔体内的引出元件,设置于第四腔体内部的控制元件,设置于第四腔体外部的传感元件以及设置于第三腔体内部的驱动元件;所述动力元件与控制元件通过设置于第二腔体内的引出元件进行连接,为控制元件提供电源;所述控制元件分别通过设置于第四腔体内的引出元件与传感元件连接,与传感元件进行数据交互;所述控制元件与驱动元件通过设置于第二腔体内的引出元件进行驱动连接,使驱动元件输出旋转动力;所述驱动元件与无人机上的旋翼连接,驱动旋翼进行旋转。
7.进一步地,所述传感元件包括气体传感器,激光雷达以及天线;所述气体传感器,激光雷达以及天线设置于第四腔体的外部并分别与第四腔体内部的控制元件进行连接。
8.进一步地,所述控制元件包括控制器和转换元件;所述控制器与转换元件进行连接。
9.进一步地,所述转换元件包括本安电源,隔离安全栅和隔离电容;所述控制器上通过电缆与本安电源连接并引出至激光雷达,为激光雷达进行供电;所述控制器通过两条信号电缆与隔离安全栅进行连接并分别引出至激光雷达与气体传感器,与激光雷达和气体传感器进行信号传输;所述控制器通过信号线缆与隔离电容连接并引出至天线,与天线进行信号传输。
10.进一步地,所述第二腔体与第四腔体内设有引出元件;所述引出元件包括第一接线端子,第二接线端子,第三接线端子,第四接线端子,第五接线端子和接线排;所述第一接线端子,第二接线端子,第三接线端子分别位于第一腔体,第四腔体和第三腔体的端口处并设置于第二腔体内部;所述接线排设置于第二腔体内部;所述第四接线端子,第五接线端子对称设置于第四腔体的端口处。
11.进一步地,所述第一腔体内动力元件依次通过设置于第二腔体内的第一接线端子,接线排,第二接线端子引线至第四腔体中的控制器;控制器的引线因此通过第四接线端子,第五接线端子引出至传感元件;控制器通过设置于第二腔体内的第二接线端子,接线排和第三接线端子引线至第三腔体内的驱动元件。
12.为了达到上述目的,本发明提供的一种煤矿下防爆无人机的引线方法,包括:
13.无人机中放置提供能源器件的腔体引线至放置连接器件的腔体后直接引入至放置控制器件的腔体,对其进行供电;
14.放置控制器件的腔体引线至放置连接器件的腔体后直接引入至执行工作的腔体内,控制其进行工作。
15.进一步地,所述连接器件为引出器件。
16.本发明提供的煤矿下防爆无人机及引线方法,其通过将动力源的电缆引出至控制器中,对控制器进行供电;控制器中的若干信号线缆进行转换后分别引出给外部的传感器,外部的传感器分别通过信号线缆与控制器进行信号交互;同时控制器中的电缆引出给驱动件,驱动件驱动无人机的旋翼进行旋转;此引线方式可以大大增加设备运行的安全性。
附图说明
17.以下结合附图和具体实施方式来进一步说明本发明。
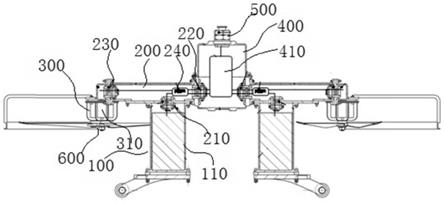
18.图1为本无人机整体结构剖视图;
19.图2为本无人机整体结构立体图;
20.图3为本无人机整体结构的侧面剖视图。
21.图4为本无人机放置电机腔体剖视图;
22.图5为本无人机放置电机腔体的局部剖视图;
23.下面为附图中的部件标注:
24.100.第一腔体200.第二腔体300.第三腔体400.第四腔体500.传感元件600.旋翼110.动力元件210.第一接线端子220.第二接线端子230.第三接线端子240.接线排250.第
四接线端子260.第五接线端子270.端口310.驱动元件410.控制元件411.控制器412.本安电源413.隔离安全栅414.隔离电容510.激光雷达520.气体传感器530天线
具体实施方式
25.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
26.针对于现有无人机内部的防爆结构存在安全性低的技术问题,本方案的目的在于提供一种煤矿下防爆无人机及引线方法,其将动力元件通过引出元件引出电缆至控制元件,为控制元件提供电源,再将控制元件通过引出元件引出线缆至驱动元件,控制驱动元件驱动无人机进行工作;同时控制元件经转换元件和引出元件与传感元件进行连接,进行数据交互;采用这样的引线方式可以增加设备运行安全性。
27.具体的,参见图1
‑
图2,无人机包括两个第一腔体100,两个第二腔体200,两个第三腔体300和一个第四腔体400;其中,两个第一腔体100,两个第二腔体200,两个第三腔体300以第四腔体400为中心对称设置。
28.进一步地,两个第一腔体100分别设置于两个第二腔体200的下方,并与第二腔体200联通;两个第二腔体200分别放置于第四腔体400的两端,其中每个第二腔体200的一端与第四腔体400联通,另一端分别与第三腔体300联通;两个第三腔体300中每个腔体的两端分别设有旋翼600。
29.综上所述,由两个第一腔体100,两个第二腔体200,两个第三腔体300,四个旋翼600以和第四腔体400为中心相互配合连接构成中心对称结构,中心对称结构可以增加设备在工作时的平稳性。
30.这里,两个第一腔体100,两个第二腔体200,两个第三腔体300为对称结构,因此其内部结构的组成均相同,举其中一侧进行具体说明。
31.无人机内部还设有引出元件,动力元件110,控制元件410,驱动元件310和传感元件500。
32.其中,引出元件包括若干接线端子和若干接线排。
33.进一步地,其中,每个第二腔体200内设有三个接线端子和一个接线排,为别为第一接线端子210,第二接线端子220和第三接线端子230;其中第一接线端子210位于第一腔100体的端口处;第二接线端子220位于第四腔体400的端口处;第三接线端子230位于第三腔体300的端口处。
34.第一腔体100内部的电缆依次从第二腔体200内部的第一接线端子210,接线排240引出至第四腔体400内部;第四腔体400内部的电缆依次从第二腔体200内部的第二接线端子220,接线排240,第三接线端子230引出至第三腔体300内部。
35.在第四腔体400的顶部对称设有第四接线端子250和第五接线端子260,通过第四接线端子250和第五接线端子260将第四腔体400内部的线缆引出至外部的传感元件500内。
36.其中,采用引出元件能够较为简便地对各个腔体输入输出的线缆进行接线;另外多个引出元件集中放置于一个腔体内,可以减少接线腔体的数量,节省成本,减轻重量。
37.这里需要说明的是,本方案中的接线端子优选采用隔爆型接线端子,其端口270为喇叭口;同时接线排240优选采用防爆接线排;采用隔爆型接线端子和防爆接线排符合防爆
要求且增加了设备在工作时的安全性。
38.其中,第一腔体100内部设有动力元件110;其中,动力元件110设置于第一腔体100内部,并将动力元件110的线缆依次通过第一接线端子210,接线排240,第二接线端子220引出至第四腔体400中。
39.具体的,动力元件110为电池,用于为设备提供能源动力。
40.这里的电池可以为一次电池或二次电池等;本方案中优选为二次电池,其为可充电电池,可以循环使用,对其循环充电对设备提供能量。
41.参见图3,第四腔体400外部设有传感元件500,用于感知外部信息,以便于对无人机工作状态进行调整。
42.传感元件500包括气体传感器520,激光雷达510和天线530。
43.其中,气体传感器520设置于第四腔体400外部的一侧,用于实施检测煤矿井下气体的浓度,以便能够及时探测到易燃易爆气体。
44.激光雷达510设置于第四腔体400外部的另一侧,通过发射和接收信号来进行导航定位。
45.天线530设置于第四腔体400外部的顶端,用于能够将无人机的信号从井下传输至地面上,与操作端进行通讯,使操作无人机的人员能够及时得知无人机和井下的状况。
46.第四腔体400内部设有控制元件410,控制元件410对动力元件110所提供的电流进行调节分配;其中控制元件410包括控制器411和转换元件。控制器通过转换元件与外部传感元件500连接,将电流分配到传感元件500上对其进行供电;通过将控制器411所引出的线缆通过转换器转换后再引出至传感元件中,如此增加了设备运行时的安全性。
47.进一步地,转换元件包括本安电源412,隔离安全栅413和隔离电容414;控制器411分别通过本安电源412,隔离安全栅413,隔离电容414与外部传感元件500连接。
48.当动力元件110的供电线缆引出至第四腔体400后与控制元件410中的控制器411连接。
49.控制器411中的供电线缆经过本安电源412转换后并通过第四接线端子250引出至第四腔体400外部的激光雷达510,为激光雷达510进行供电。
50.控制器411中的另外两条信号线缆分别经过隔离安全栅413隔离后,通过第四接线端子250引出至第四腔体400的外部,分别与激光雷达510和气体传感器520相连接;激光雷达510与气体传感器520通过信号线缆可以与控制器411进行信号传输。
51.控制器411中的天线信号线缆经隔离电容隔离414,通过第五接线端子260引出至第四腔体400外部,与天线530连接;天线530通过信号线缆可与控制器411之间进行信号传输。
52.控制器411中的另一条供电线缆通过第二接线端子220,接线排240,第三接线端子230引出至第三腔体300内部。
53.参见图4
‑
图5,第三腔体300内部设有两个驱动元件310,两个驱动元件310分别设置于第三腔体300的两端;将控制器411的电缆引出至驱动元件310内,可以使驱动元件310输出旋转运动状态,并于下方的旋翼600连接驱动旋翼600进行旋转。
54.这里驱动元件310优选采用无刷电机,无刷电机效率更高,能耗更低且设备在工作时的运行时间更长。
55.以下举例说明一下本方案在使用时的工作过程;这里需要说明下述内容只是本方案的一种具体应用示例,并不对本方案构成限定。
56.本方案中的防爆排线设计为将动力元件110中的电缆通过接线端子,接线排引出至控制器411中,为控制器411进行供电。
57.控制器411通过转换元件将电流进行调节分配,分别通过接线端子传输至外部的传感元件500上,传感元件500对外部的环境,状况的信息进行采集后通过信号线缆与控制器411进行信息传输。
58.同时,控制器411另外引出一条线缆通过接线端子和接线排240引出至驱动元件310中,为驱动元件310提供动力,驱动下方的旋翼600进行旋转,带动整体无人机进行飞行。
59.综上所述,由上述方案构成的一种煤矿下防爆无人机及引线方法,其防爆排线的方式大大提高了设备运行的安全性,且在布局方面减少腔体的数量,从而节省了制造成本,减轻重量,使无人机续航时长增加。
60.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。