1.本实用新型涉及无人机技术领域,具体为一种精准投料无人机。
背景技术:
2.随着社会的发展,科技的进步。无人机的应用领域正在不断被拓宽,尤其是基于无人机进行的二次开发,使无人机可以广泛地应用在实际生活中。现在的无人机的应用开发多停留在农业领域,如中国专利文献cn213756384u公开的一种用于农药喷洒的无人机,或中国专利文献cn 110447584 a公开的一种用于水产养殖投料的无人机。现有技术中精准投料无人机均需人工操作。
技术实现要素:
3.本实用新型的目的是克服现有技术的不足,提供一种精准投料的无人机,无需人工操纵实现两地之间的货物转运。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种精准投料无人机,包括机架机构、动力机构、储物机构、监测机构、控制机构,机架机构包括机架本体和围绕机架本体均匀设置的动力载架,动力机构固定于动力载架上,动力机构包括螺旋桨、无刷电机、电源,储物机构为物料槽,所述监测机构包括用于寻迹的红外模块、用于避障的超声模块、用于摄取参考图片的摄像模块;控制机构包括飞行路线预设模块、飞行状态控制模块、目的地判断模块、物料槽控制模块,飞行状态控制模块用于根据红外模块、超声模块得到的实时数据对无刷电机的参数进行调整,目的地判断模块用于通过对摄像模块摄取的实时图片与预存的特征图片进行比对并判断是否到达目的地,物料槽控制模块用于控制物料槽的卸料作业。
6.本实用新型的发明构思在于:在目的地设立可用于目的地识别的标志标识,并通过飞行路线预设模块预设飞行路线,比如拟将堆积于厂房的一楼的货物运送至二楼的特定区域,则可以在目的地竖立设立一细杆,并将细杆的照片预存于控制机构内,无人机可根据预设路线飞行,并最终需要照片比对确认实际的目的位置。红外模块用于寻迹,飞行状态控制模块用于根据红外模块、超声模块得到的实时数据对无刷电机的参数进行调整,实现对无人机速度和方向的调整,最后由物料槽控制模块实现精准投料。投料完成后,无人机根据预设路线返回出发点。
7.作为改进,所述机架机构包括支撑脚,每个动力载架的下方均设有支撑脚。
8.作为改进,所述动力机构的外侧设有机翼保护罩,使螺旋桨在飞行过程或停止时别外物碰伤。
9.作为进一步改进,所述机翼保护罩包括扇形底面和位于扇形底面弧形边缘的护栏,所述螺旋桨位于扇形底面的上方。
10.作为进一步改进,所述机翼保护罩的护栏高于螺旋桨的顶部。
11.作为改进,所述物料槽在底部开设有由转向杆控制的活动门,用于驱动转向杆的
舵机由物料槽控制模块控制。
12.作为进一步改进,所述红外模块共有2个,布置于机架机构的相邻两侧。
13.作为再进一步改进,所述控制机构包括无线遥控模块以实现人工控制,需要手动操作飞行时,可以通过无线遥控模块实现对无人机的手工操纵。
14.综上所述,本实用新型具有结构合理、功能实用的特点,可操作性强、投料精准,并可选择操控模式。
附图说明
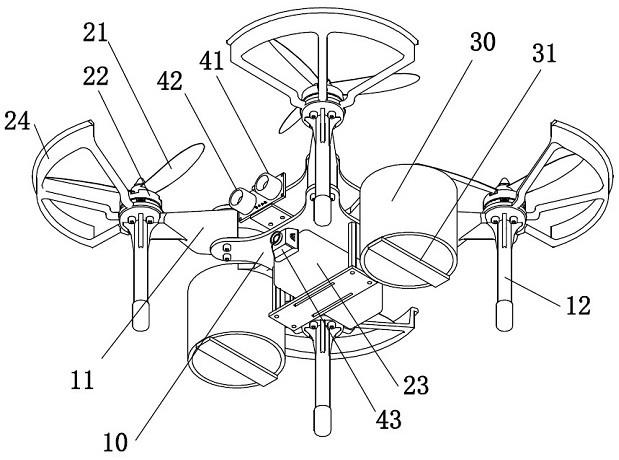
15.图1为本实用新型的结构示意图;
16.图2为本实用新型的俯视图。
17.图中:10、机架本体;11、动力载架;12、支撑脚;21、螺旋桨;22、无刷电机;23、电源;24、机翼保护罩;30、物料槽;31、转向杆;41、红外模块;42、超声模块;43、摄像模块。
具体实施方式
18.如图1、图2所示,本实用新型所述的精准投料无人机包括机架机构、动力机构、储物机构、监测机构、控制机构五大机构。机架机构为其他机构的承载体,其包括机架本体10和围绕机架本体10均匀设置的动力载架11,机架本体10为上下夹层机构,动力载架11固定于机架本体10边缘,每个动力载架11的下方均设有支撑脚12。
19.动力机构固定于动力载架11上,动力机构包括螺旋桨21、无刷电机22、电源23。螺旋桨21采用四轴四旋翼,以达到更好的续航要求。电源23位于机架本体10的底部。动力机构的外侧设有机翼保护罩24,以保证螺旋桨21在工作状态中不受到外来干扰和损伤。机翼保护罩24包括扇形底面和位于扇形底面弧形边缘的护栏,螺旋桨21位于扇形底面的上方,机翼保护罩24的护栏高于螺旋桨21的顶部。
20.机架本体10的下方设有储物机构,储物机构为2个物料槽30,物料槽30在底部开设有由转向杆31控制的活动门,物料槽30下部设有舵机,舵机用于驱动转向杆31的开合,舵机在附图中未示出。
21.监测机构包括用于寻迹的红外模块41、用于避障的超声模块42、用于摄取参考图片的摄像模块43。红外模块41共有2个,布置于机架机构的相邻两侧。
22.控制机构具备有模块化处理能力,对无人机输入信号和输出信号能够做出精准地响应,包括飞行路线预设模块、飞行状态控制模块、目的地判断模块、物料槽控制模块、无线遥控模块五大模块。飞行状态控制模块用于根据红外模块41、超声模块42得到的实时数据对无刷电机22的参数进行调整,实时调整运动速度与方向。目的地判断模块用于通过对摄像模块43摄取的实时图片与预存的特征图片进行比对并判断是否到达目的地。物料槽控制模块通过对物料槽上配设舵机的控制实现物料槽30的卸料作业,可通过pid算法保持物料投放时无人机架的平衡。无线遥控模块用以达到人工手动操纵无人机的目的,人工手动操纵无人机为优先级最高的控制方式。
23.当要进行无人机精准投料工作时,首先将需要进行运输的物料放置在物料槽30,其次通过控制器启动无人机,同时输入需要投料的目的地和飞行路线,摄像模块43已提前收集投料区图像信息,无线遥控模块为优先级最高的控制方式,便于人员操作。无人机启动
后,红外模块41、超声模块42、摄像模块43开始工作,红外模块41对其周围地貌进行校对,超声模块42对周围是否存在障碍物进行确认,两个模块组在确认前方无障碍时,将信号反馈至控制机构,控制机构控制无刷电机22开始运作,无刷电机22驱动螺旋桨21开始运作,红外模块41、超声模块42、摄像模块43进行实时数据采集并将数据传输至控制机构,控制机构根据实时数据进行分析,计算得出合适的飞行速度和转向角度,控制无刷电机22的转速和方向,精确地控制无人机运动轨迹。无人机将要飞行到目的地并要进行投料时,红外模块41、摄像模块43采集目的地周围环境信息并传回控制机构,控制机构通过与预存的特征图片进行比对确定是否到达目的地,目的地信息准确无误后,反馈给舵机,舵机控制转向杆31来投放物料。
技术特征:
1.一种精准投料无人机,包括机架机构、动力机构、储物机构、监测机构、控制机构,机架机构包括机架本体(10)和围绕机架本体(10)均匀设置的动力载架(11),动力机构固定于动力载架(11)上,动力机构包括螺旋桨(21)、无刷电机(22)、电源(23),储物机构为物料槽(30),其特征在于:所述监测机构包括用于寻迹的红外模块(41)、用于避障的超声模块(42)、用于摄取参考图片的摄像模块(43);控制机构包括飞行路线预设模块、飞行状态控制模块、目的地判断模块、物料槽控制模块,飞行状态控制模块用于根据红外模块(41)、超声模块(42)得到的实时数据对无刷电机(22)的参数进行调整,目的地判断模块用于通过对摄像模块(43)摄取的实时图片与预存的特征图片进行比对并判断是否到达目的地,物料槽控制模块用于控制物料槽(30)的卸料作业。2.根据权利要求1所述的一种精准投料无人机,其特征在于:所述机架机构包括支撑脚(12),每个动力载架(11)的下方均设有支撑脚(12)。3.根据权利要求1所述的一种精准投料无人机,其特征在于:所述动力机构的外侧设有机翼保护罩(24)。4.根据权利要求3所述的一种精准投料无人机,其特征在于:所述机翼保护罩(24)包括扇形底面和位于扇形底面弧形边缘的护栏,所述螺旋桨(21)位于扇形底面的上方。5.根据权利要求4所述的一种精准投料无人机,其特征在于:所述机翼保护罩(24)的护栏高于螺旋桨(21)的顶部。6.根据权利要求1所述的一种精准投料无人机,其特征在于:所述物料槽(30)在底部开设有由转向杆(31)控制的活动门,用于驱动转向杆(31)的舵机由物料槽控制模块控制。7.根据权利要求1所述的一种精准投料无人机,其特征在于:所述红外模块(41)共有2个,布置于机架机构的相邻两侧。8.根据权利要求1所述的一种精准投料无人机,其特征在于:所述控制机构包括无线遥控模块以实现人工控制。
技术总结
本实用新型涉及无人机技术领域,具体为一种精准投料无人机。该精准投料无人机包括机架机构、动力机构、储物机构、监测机构、控制机构,动力机构包括螺旋桨(21)、无刷电机(22)、电源(23),监测机构包括用于寻迹的红外模块(41)、用于避障的超声模块(42)、用于摄取参考图片的摄像模块(43);控制机构包括飞行路线预设模块、飞行状态控制模块、目的地判断模块、物料槽控制模块,飞行状态控制模块用于对无刷电机(22)进行调整,目的地判断模块用于通过对摄像模块(43)摄取的实时图片与预存的特征图片进行比对并判断是否到达目的地,物料槽控制模块用于控制物料槽(30)的卸料作业。本实用新型可操作性强、投料精准,并可选择操控模式。并可选择操控模式。并可选择操控模式。
技术研发人员:朱成镇 吴和平 赵安吉 侯永超 潘鑫怡 王永立 魏玉兰 李兵
受保护的技术使用者:湖州师范学院
技术研发日:2021.09.16
技术公布日:2021/12/31