1.本实用新型涉及涵道推进无人机,特别是涉及一种高升阻比双涵道推进无人机。
背景技术:
2.环境保护、气象探测、航空测绘遥感的对无人机的载荷、飞行速度、稳定性、气动性能等均提出了较高要求。结合我国当前生态环境、国土资源的探测、监视、勘测需求,行业迫切需求一种可以实现中高速飞行、飞行稳定性高、升阻比大的无人机。中高速飞行可实现北方大面积草原、戈壁滩、山区、沙漠的植被生态监测,结合航测数据结果,为后续的绿化、防沙等工程及科学研究提供方案参考和数据支撑;飞行稳定性高为无人机在极端天气的作业提供了可能,同时为常规航空测绘、监测提供了更优的视频数据和图像条件,以减少无人机作业时间和频次;升阻比大是无人机气动性能的重要参数,大升阻比可进一步提高无人机巡航时间和航程,并为有效载荷装载提供了更多可能。因此,中高速飞行、飞行稳定好、升阻比大是该类无人机设计的重要方向,为未来的环境保护、气象监测等提供了平台设计可能。
3.本实用新型的技术问题在于实现以下几个关键问题:(1)低空测绘和监测对提供图像分辨率有较大影响,如何设计无人机使实现中高速飞行,并确保飞行安全和操作;(2)低空气流易受到地形地貌的影响,对无人机飞行姿态影响严重,如何获得较高的飞行稳定性是该类无人机的重要设计目标;(3)航程、航时对测绘、监测等的经济性、有效性影响较大,如何同时保障高升阻比是第三个关键问题。以上三个关键问题的有效解决,会大幅提升现有无人机航测、环境监测、国土资源监测的效率,提高无人机任务区域,在大面积航空测绘、草原生态监测、沙漠生态变化监测具有更多应用潜力。
技术实现要素:
4.本实用新型所要解决的问题是,针对上述现有技术中的缺点,提出改进方案或者替换方案,尤其是提供一种具备中高速飞行、飞行稳定性好、升阻比大的双涵道推进无人机。
5.为解决上述问题,本实用新型采用的方案如下:一种高升阻比双涵道推进无人机,其特征在于,所述高升阻比双涵道推进无人机包括细长机身、三级串列式机翼、控制舵面、双涵道动力装置;所述三级串列式机翼包含前中后三个不同平面形状的前机翼、中机翼、主机翼,并从前到后依次设置在细长机身上;所述双涵道动力装置对称设置在主机翼上,且位于细长机身的两侧;所述控制舵面位于中机翼、主机翼和双涵道动力装置的涵道结构上,用于无人机飞行姿态控制
6.高升阻比双涵道推进无人机包括细长机身、三级串列式机翼、控制舵面、双涵道动力装置部分,所述细长机身用于机翼、动力装置、有效载荷等装载,串列式机翼包含前后三个不同平面形状的机翼,控制舵面实现无人机飞行姿态控制,双涵道动力装置采用融合式设计,实现大推力的同时减小气动阻力。
7.进一步地,所述细长机身部分由机身、前三点式起落架组成,机身采用细长式外
形,提高中高速飞行时的升阻比,前三点式起落架的前轮位于机身前段距机头20
‑
35%机身长度处,后两轮左右对称位于主机翼下方。
8.进一步地,所述三级串列式机翼由前机翼、中机翼、主机翼组成,前机翼位于机身前端距机头10
‑
15%处,下反角为5
‑
10度,展弦比为12
‑
20,中机翼位于机身距机头20
‑
30%处,展弦比为10
‑
16,上反角为3
‑
8度,主机翼展弦比为8
‑
14,采用倒鸥式结构,内端下反角20
‑
35度,外端上反角20
‑
30度,三级串列式机翼均可采用低速翼型、层流翼型、超临界翼型。
9.进一步地,所述控制舵面部分由副翼、双方向舵、辅助舵面组成,副翼位于主机翼外端后缘,弦长为对应机翼弦长的25
‑
30%,双方向舵位于涵道结构外部后缘,弦长为对应涵道结构弦长的20
‑
30%,辅助舵面位于中机翼后缘,弦长为对应机翼弦长的10
‑
20%,展向长度为机翼展长的60
‑
85%。
10.进一步地,所述双涵道动力装置部分由左右对称的涵道结构、涵道风扇组成。涵道结构与主机翼融合式设计,位于主机翼内端后侧,涵道结构可采用低速翼型、层流翼型、超临界翼型,提供部分升力、降低阻力,涵道风扇位于涵道结构和主机翼组成的涵道内。
11.与现有相似的环境监测、航空测绘等应用无人机相比,本实用新型具有如下优点:
12.(1)采用三级串列式机翼,有效降低了产生同样升力时需要的大展长设计,降低了无人机起降条件和气动阻力,实现了中高速飞行设计。
13.(2)采用融合式双涵道设计,进一步降低了阻力,双涵道设计提高推力约15
‑
30%,并提高了升力。
14.(3)采用三级串列式+融合式双涵道设计,改善了无人机的气动特性,提高升力系数,为高升阻比提供了设计基础。
附图说明
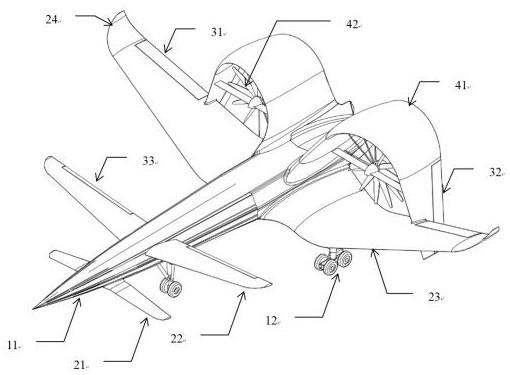
15.图1为本实用新型的无人机斜视图。
16.图2为本实用新型的无人机前视图。
17.图3为本实用新型的无人机侧视图。
18.图4为本实用新型的无人机俯视图。
19.图中,11机身、12前三点起落架、21前机翼、22中机翼、23主机翼、31副翼、32双方向舵、33辅助舵面、41涵道结构、42涵道风扇。
具体实施方式
20.下面结合附图对本实用新型做进一步详细说明。
21.实施例1:
22.本实用新型提供了一种高升阻比双涵道推进无人机,所述高升阻比双涵道推进无人机包括细长机身、三级串列式机翼、控制舵面、双涵道动力装置部分,所述细长机身用于机翼、动力装置、有效载荷等装载,串列式机翼包含前后三个不同平面形状的机翼,控制舵面实现无人机飞行姿态控制,双涵道动力装置采用融合式设计,实现大推力的同时减小气动阻力。
23.所述细长机身部分由机身11、前三点式起落架12组成,机身11采用细长式外形,提高中高速飞行时的升阻比,前三点式起落架12的前轮位于机身前段距机头20
‑
35%机身长度
处,后两轮左右对称位于主机翼23下方。
24.所述三级串列式机翼由前机翼21、中机翼22、主机翼23组成,前机翼21位于机身前端距机头10
‑
15%处,下反角为5
‑
10度,展弦比为12
‑
20,中机翼22位于机身距机头20
‑
30%处,展弦比为10
‑
16,上反角为3
‑
8度,主机翼23展弦比为8
‑
14,采用倒鸥式结构,内端下反角20
‑
35度,外端上反角20
‑
30度,三级串列式机翼均可采用低速翼型、层流翼型、超临界翼型。
25.所述控制舵面部分由副翼31、双方向舵32、辅助舵面33组成,副翼位于主机翼23外端后缘,弦长为对应机翼弦长的25
‑
30%,双方向舵32位于涵道结构41外部后缘,弦长为对应涵道结构弦长的20
‑
30%,辅助舵面33位于中机翼22后缘,弦长为对应机翼弦长的10
‑
20%,展向长度为机翼展长的60
‑
85%。
26.所述双涵道动力装置部分由左右对称的涵道结构41、涵道风扇42组成。涵道结构41与主机翼23融合式设计,位于主机翼23内端后侧,涵道结构41可采用低速翼型、层流翼型、超临界翼型,提供部分升力、降低阻力,涵道风扇42位于涵道结构41和主机翼23组成的涵道内。
27.实施例2:
28.实施例2与实施例1的区别在于:前三点式起落架12的前轮位于机身前段距机头20%机身长度处。
29.前机翼21位于机身前端距机头10%处,下反角为5度,展弦比为12,中机翼22位于机身距机头20%处,展弦比为10,上反角为3度,主机翼23展弦比为8,采用倒鸥式结构,内端下反角20度,外端上反角20度,三级串列式机翼均可采用低速翼型。
30.副翼位于主机翼23外端后缘,弦长为对应机翼弦长的25%,双方向舵32位于涵道结构41外部后缘,弦长为对应涵道结构弦长的20%,辅助舵面33位于中机翼22后缘,弦长为对应机翼弦长的10%,展向长度为机翼展长的60%。
31.涵道结构41可采用低速翼型。
32.实施例3:
33.实施例3与实施例1的区别在于:前机翼21位于机身前端距机头12%处,下反角为7度,展弦比为15,中机翼22位于机身距机头25%处,展弦比为12,上反角为5度,主机翼23展弦比为10,采用倒鸥式结构,内端下反角25度,外端上反角25度,三级串列式机翼均可采用层流翼型。
34.副翼位于主机翼23外端后缘,弦长为对应机翼弦长的28%,双方向舵32位于涵道结构41外部后缘,弦长为对应涵道结构弦长的25%,辅助舵面33位于中机翼22后缘,弦长为对应机翼弦长的15%,展向长度为机翼展长的70%。
35.涵道结构41可采用层流翼型、超临界翼型。
36.实施例4:
37.实施例4与实施例1的区别在于:前三点式起落架12的前轮位于机身前段距机头35%机身长度处。
38.前机翼21位于机身前端距机头15%处,下反角为10度,展弦比为20,中机翼22位于机身距机头30%处,展弦比为16,上反角为8度,主机翼23展弦比为14,采用倒鸥式结构,内端下反角35度,外端上反角30度,三级串列式机翼均可采用超临界翼型。
39.副翼位于主机翼23外端后缘,弦长为对应机翼弦长的30%,双方向舵32位于涵道结
构41外部后缘,弦长为对应涵道结构弦长的30%,辅助舵面33位于中机翼22后缘,弦长为对应机翼弦长的20%,展向长度为机翼展长的85%。
40.涵道结构41可采用超临界翼型。
41.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
42.尽管本文较多地使用了机身11、前三点起落架12、前机翼21、中机翼22、主机翼23、副翼31、双方向舵32、辅助舵面33、涵道结构41、涵道风扇42等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。