1.本发明涉及蜂群无人机总体设计技术领域,特别是涉及一种便携式蜂群无人机系统及其使用方法。
背景技术:
2.蜂群无人机是一种由大量具备一定自主能力和集群协同能力的微小型蜂群无人机构成的蜂群无人机系统。受限于微小的体型,蜂群无人机单体通常在任务航程、有效滞空时间、任务载重能力等技术指标上不及中大型蜂群无人机,但由于蜂群无人机系统个体数量多,系统资源分散配置的优势,通过有效协同,在某些领域能够取得中大型蜂群无人机无法比拟的效果;同时,由于蜂群无人机个别单体损失后,对系统整体的效能损失影响小,因而具备更强的抗损毁性。
3.尽管概念先进,但现阶段的蜂群无人机鲜有应用的先例。具体原因主要有两点:一是蜂群无人机本身的装载、投放技术难度高,通常需要大型运输机、专用车辆等平台,难以大量推广普及;二是蜂群无人机之间的协同能力差,容易陷入各自行动的不利局面,无法发挥蜂群本身的数量优势。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种便携式蜂群无人机系统及其使用方法,能够以一种便携的方法有效解决由大量蜂群无人机组成的蜂群系统的收纳、装载和使用时的投放问题。
5.本发明是通过采用下述技术方案实现的:一种便携式蜂群无人机系统,其特征在于:包括火箭发射筒和释放装置;所述释放装置位于火箭发射筒的发射管内,包括释放装置本体、整流罩和火箭系统助推器;所述释放装置本体按照自顶至底的顺序,包括降落伞包、旋翼、沿纵向分多层环绕布置的若干蜂群无人机和底部的通信指挥天线;所述蜂群无人机通过环绕着电磁线圈的棱柱凸起吸附在释放装置本体上,所述释放装置本体通过电磁力停靠和弹射蜂群无人机。
6.所述释放装置本体的旋翼设有8片,包括上下两层;展开时,上面一层旋翼向下旋转90
°
,下面一层旋翼向上旋转90
°
;旋翼完全展开时,上下两层旋翼通过同轴反转。
7.每架蜂群无人机停靠在释放装置本体上时,蜂群无人机的4个安装有旋翼的涵道式升力部件绕机身根部耳轴向内旋转,紧靠机腹折叠收拢。
8.所述降落伞包通过4个连接销与释放装置本体顶部连接,连接销下面设有用于炸断伞绳的炸药。
9.还包括若干电池,所述电池呈长条棱柱状,分两层,每层4个安装在蜂群无人机下面且靠近释放装置本体纵轴中心的位置。
10.所述蜂群无人机沿纵向分4层安装在释放装置本体上,每层4架,各呈90
°
。
11.所述蜂群无人机上还设有光学摄像头、红外摄像头和激光测距仪。
12.一种便携式蜂群无人机系统的使用方法,其特征在于:包括以下步骤:s1. 火箭发射筒前端瞄准目标空域,发射释放装置;s2. 释放装置末端自带的火箭系统助推器继续助推,到达预设高度后,火箭系统助推器与释放装置本体分离;s3. 包裹释放装置本体的整流罩解锁,并从释放装置本体两边剥离,同时释放装置本体顶端的降落伞包弹开,凭借降落伞的升力,释放装置本体调整成竖直姿态;s4. 待释放装置本体下降姿态调整为竖直,并且下降速度稳定在2
‑
4m/s时,安装在伞绳底端连接销下面的炸药引爆,将伞绳炸断并抛伞,此时释放装置本体的旋翼展开,依靠旋翼,释放装置本体在某一高度悬停或盘旋,或根据任务需求,前往另一区域上空;s5. 释放装置本体依靠旋翼在空中稳定姿态后,通过给棱柱凸起上的电磁线圈瞬时通电,使其产生一个和蜂群无人机排斥的磁场力,蜂群无人机被弹射出释放装置本体,释放到空中;s6. 蜂群无人机四个涵道向机身旋转180
°
达到完全展开,通过四个旋翼的转速匹配来自主调整飞行姿态,稳定在释放装置本体附近,然后,单个蜂群无人机通过机体内置的数据链天线逐个与释放装置本体建立通信连接,此后的任务中,单个蜂群无人机将侦察获取的情报通过数据链天线分别发送至释放装置本体,由释放装置本体统一决策,并向相应的蜂群无人机下达行动指令。
13.所述步骤s1中瞄准目标空域指利用火箭发射筒自带的热成像和可见光观察窗口进行观察并瞄准;所述火箭发射筒以单人肩扛式的发射方式发射释放装置。
14.所述步骤s5中蜂群无人机被弹射出释放装置本体时,能依据任务需求,选择将蜂群无人机一次性全部弹射出,或者仅弹出所需数量的蜂群无人机,其余蜂群无人机仍挂载在释放装置本体上,在空中待命。
15.与现有技术相比,本发明的有益效果表现在:1、本发明提供一种便携式的蜂群无人机系统,通过将大量蜂群无人机集成到火箭发射筒内,火箭发射筒的整体尺寸大小、重量满足单人携带的需求,可以由地面人员选择合适的地方,以隐蔽、快速的方式将蜂群无人机投放到任务目标区,此方法将常见的火箭发射筒与蜂群无人机结合起来,解决了以往蜂群无人机需要飞机、车辆进行投放的限制,增加了其使用灵活性。
16.2、本发明通过蜂群无人机本身的折叠式升力涵道设计、蜂群无人机与释放装置本体通过电磁线圈连接和释放、蜂群无人机分多层部署在释放装置本体上等设计,解决了蜂群无人机的大容量装载和收纳问题,提高了释放装置的装载空间利用率,使得单人携带大量蜂群无人机执行任务成为可能。
17.3、本发明通过释放装置本体的可折叠式双层对转旋翼的设计和释放装置本体顶端的可抛离降落伞,解决了释放装置本体在空中的姿态调节问题,并且,释放装置本体可以通过双层对转旋翼的操控,实现悬停或伴随蜂群无人机机动转移。
18.4、旋翼完全展开时,上下两层旋翼通过同轴反转,来抵消旋翼旋转对释放装置本体施加的反力矩。
19.5、本方法中,火箭发射筒采用单人肩扛式发射的方式,不是固定在地面的,以便于地面人员选择合适的地方灵活使用蜂群无人机。
20.6、本使用方法中,所述释放装置本体顶端携带的降落伞,在外部的火箭整流罩抛离之前,是由筒状伞盒收纳在火箭内部的,只有火箭整流罩抛离之后,降落伞才会展开,为释放装置提供一定升力,调整其姿态为竖直姿态,便于接下来释放蜂群无人机。
附图说明
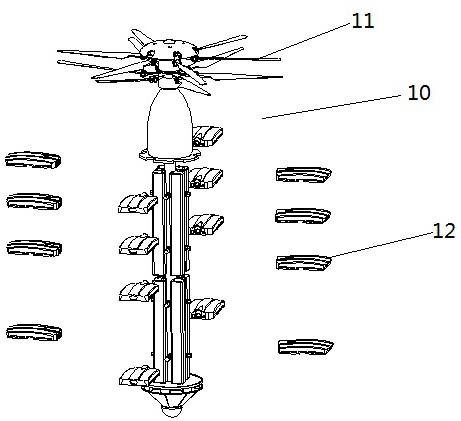
21.下面将结合说明书附图和具体实施方式对本发明作进一步的详细说明,其中:图1为本发明中蜂群无人机释放的示意图;图2是本发明的瞄准发射阶段示意图;图3是本发明的火箭系统助推器完成阶段示意图;图4是本发明的整流罩剥离阶段示意图;图5是本发明的降落伞弹开阶段示意图;图6是本发明的蜂巢出动示意图;图7是本发明的蜂群无人机旋翼涵道收拢示意图;图8是本发明的蜂群无人机旋翼涵道展开示意图;图9是本发明的执行任务示意图;图中标记:1、火箭发射筒,2、释放装置,3、目标空域,4、大端盖,5、扳机,6、瞄准器,7、火箭系统助推器,8、整流罩,9、降落伞,10、释放装置本体,11、旋翼,12、蜂群无人机。
具体实施方式
22.实施例1作为本发明基本实施方式,本发明包括一种便携式蜂群无人机系统,包括火箭发射筒1和释放装置2。所述释放装置2包括释放装置本体10、整流罩8和火箭系统助推器7。所述整流罩8是包裹在释放装置本体10外面,可沿纵向剖面分成两瓣打开并与释放装置本体10分离的壳体结构,主要用途是减少释放装置本体10从火箭发射筒1发射出来,并在空气中飞行的气动阻力,减弱飞行时的空气边界层分离,提高飞行方向的稳定性。火箭系统助推器7是安装在整流罩8尾部的助推装置,用于将释放装置本体10从火箭发射筒1内发射升空。所述释放装置本体10按照自顶至底的顺序,包括降落伞包、旋翼11、沿纵向分多层环绕布置的若干蜂群无人机12和底部的通信指挥天线。所述蜂群无人机12通过环绕着电磁线圈的棱柱凸起吸附在释放装置本体10上,所述释放装置本体10通过电磁力停靠和弹射蜂群无人机12。
23.火箭发射筒1是非任务状态下的蜂群无人机12系统的收纳装置,所述释放装置2位于火箭发射筒1的发射管内。需执行任务时,通过单人肩扛发射的方式,利用火箭发射筒1将释放装置2发射至空中,蜂群无人机12再从释放装置本体10中分离出来。释放装置本体10是蜂群无人机12的蜂巢,若干架蜂群无人机12安装在释放装置本体10上,释放装置本体10与蜂群无人机12之间通过数据链通信,任务决策由释放装置本体10统一向蜂群无人机12下达。
24.实施例2作为本发明一较佳实施方式,本发明包括一种便携式蜂群无人机系统,包括火箭
发射筒1和释放装置2。所述释放装置2位于火箭发射筒1的发射管内,包括释放装置本体10、整流罩8和火箭系统助推器7。所述释放装置本体10按照自顶至底的顺序,包括降落伞包、旋翼11、沿纵向分多层环绕布置的若干蜂群无人机12和底部的通信指挥天线。所述蜂群无人机12通过环绕着电磁线圈的棱柱凸起吸附在释放装置本体10上,所述释放装置本体10通过电磁力停靠和弹射蜂群无人机12。所述释放装置本体10的旋翼11设有8片,包括上下两层;展开时,上面一层旋翼11向下旋转90
°
,下面一层旋翼11向上旋转90
°
。旋翼11完全展开时,上下两层旋翼11通过同轴反转。每架蜂群无人机12停靠在释放装置本体10上时,蜂群无人机12的4个安装有旋翼的涵道式升力部件绕机身根部耳轴向内旋转,紧靠机腹折叠收拢。
25.实施例3作为本发明另一较佳实施方式,本发明包括一种便携式蜂群无人机系统,包括火箭发射筒1和释放装置2。所述释放装置2位于火箭发射筒1的发射管内,包括释放装置本体10、整流罩8和火箭系统助推器7。所述释放装置本体10按照自顶至底的顺序,包括降落伞包、旋翼11、沿纵向分多层环绕布置的若干蜂群无人机12和底部的通信指挥天线。所述蜂群无人机12通过环绕着电磁线圈的棱柱凸起吸附在释放装置本体10上,所述释放装置本体10通过电磁力停靠和弹射蜂群无人机12。
26.所述降落伞包通过4个连接销与释放装置本体10顶部连接,连接销下面设有用于炸断伞绳的炸药。
27.还包括若干电池,所述电池呈长条棱柱状,分两层,每层4个安装在蜂群无人机12下面且靠近释放装置本体10纵轴中心的位置。
28.实施例4作为本发明最佳实施方式,本发明包括一种便携式蜂群无人机系统,包括火箭发射筒1和释放装置2,所述释放装置2位于火箭发射筒1的发射管内。所述释放装置2包括释放装置本体10、整流罩8和火箭系统助推器7。所述释放装置本体10按照自顶至底的顺序,包括降落伞包、旋翼11、沿纵向分多层环绕布置的若干蜂群无人机12和底部的棱锥状部件,所述棱锥状部件是用于和蜂群无人机12建立通信、指挥关系的数据链天线。其中,火箭发射筒1是非任务状态下的蜂群无人机12系统的收纳装置,需执行任务时,通过单人肩扛发射的方式,利用火箭发射筒1将释放装置2发射至空中,蜂群无人机12再从释放装置本体10中分离出来。所述整流罩8是包裹在释放装置本体10外面,可沿纵向剖面分成两瓣打开并与释放装置本体10分离的壳体结构,主要用途是减少释放装置本体10从火箭发射筒1发射出来,并在空气中飞行的气动阻力,减弱飞行时的空气边界层分离,提高飞行方向的稳定性。火箭系统助推器7是安装在整流罩8尾部的助推装置,用于将释放装置2从火箭发射筒1内发射升空。
29.释放装置本体10是蜂群无人机12的“蜂巢”,所述蜂群无人机12沿纵向分4层安装在释放装置本体10上,每层4架,各呈90
°
,通过释放装置本体10上的六棱柱金属柱体缠绕电磁线圈并通电产生的电磁力吸附在释放装置本体10上,释放蜂群无人机12时,改变电磁线圈中的电流方向,产生与吸附力方向相反的排斥力,从而将蜂群无人机12与释放装置本体10脱离。
30.8块长条棱柱状电池分两层,每层4个安装在蜂群无人机12下面、靠近释放装置本体10纵轴中心的位置。降落伞包通过4个连接销与释放装置本体10顶部连接,降落伞包在整流罩8抛离后可展开成降落伞9,用于调节释放装置本体10的空中姿态并减速。旋翼11位于
降落伞包之下,分上下两层安装,用于旋转产生升力,供释放装置本体10在空中悬停或飞行。所述释放装置本体10的旋翼11包括上下两层的8片旋翼11,展开时,上面一层旋翼11向下旋转90
°
,下面一层旋翼11向上旋转90
°
;旋翼11完全展开时,上下两层旋翼11通过同轴反转,来抵消旋翼11旋转对释放装置2本身施加的反力矩。
31.所述蜂群无人机12的机头上还设有三个圆形凹陷部位,分别安装有光学摄像头、红外摄像头和微小型激光测距仪。光学摄像头用于在白天进行环境感知和目标跟踪,红外摄像头则用于在夜间进行环境感知和目标跟踪,激光测距离通过发射激光,测量蜂群无人机12与目标的距离。
32.参照说明书附图7,为了减小单架蜂群无人机12在收拢时所占用的空间,提高释放装置2中的蜂群无人机12携带数量,每架蜂群无人机12在停靠在释放装置本体10上时,蜂群无人机12的4个安装有旋翼的涵道式升力部件绕机身根部耳轴向内旋转,紧靠机腹折叠收拢。
33.实施例5作为本发明另一较佳实施方式,本发明包括一种便携式蜂群无人机系统的使用方法,采用的系统如实施例4所述,本方法具体包括以下步骤:s1. 参照说明书附图2,火箭发射筒1前端瞄准目标空域3,发射释放装置2,具体为:将火箭发射筒1前端对准目标空域3,利用火箭发射筒1的大端盖4抵住射手肩部,并掰正瞄准器6,在白天、夜间、恶劣天气下利用火箭发射筒1自带的热成像和可见光观察窗口进行观察并瞄准目标空域3。当瞄准器6发出提示信号后,解除发射锁定,扣动扳机5将装载在发射管内的释放装置2击发。以单人肩扛式的发射方式发射释放装置2,以便于地面人员选择合适的地方灵活使用蜂群无人机12。
34.s2. 参照说明书附图3,释放装置2末端自带的火箭系统助推器7继续助推,到达预设高度后,火箭系统助推器7与释放装置本体10分离。
35.s3. 参照说明书附图4和说明书附图5,包裹释放装置本体10的整流罩8解锁,并从释放装置本体10两边剥离,同时释放装置本体10顶端的降落伞包弹开,凭借降落伞9的升力,释放装置本体10调整成竖直姿态。
36.s4. 参照说明书附图6,所述释放装置本体10顶端携带的降落伞9,在外部的火箭整流罩8抛离之前,是由筒状伞盒收纳在火箭内部的,只有火箭整流罩8抛离之后,降落伞9才会展开,为释放装置2提供一定升力,调整其姿态为竖直姿态,便于接下来释放蜂群无人机12。待释放装置本体10下降姿态调整为竖直,并且下降速度稳定在2
‑
4m/s时,安装在伞绳底端连接销下面的炸药引爆,将伞绳炸断并抛伞,此时释放装置本体10的旋翼11展开,依靠旋翼11,释放装置本体10在某一高度悬停或盘旋,或根据任务需求,前往另一区域上空。
37.s5. 参照说明书附图1,释放装置本体10依靠旋翼11在空中稳定姿态后,通过给棱柱凸起上的电磁线圈瞬时通电,使其产生一个和蜂群无人机12排斥的磁场力,蜂群无人机12被弹射出释放装置本体10,释放到空中。蜂群无人机12被弹射出释放装置本体10时,能依据任务需求,选择将蜂群无人机12一次性全部弹射出,或者仅弹出所需数量的蜂群无人机12,其余蜂群无人机12仍挂载在释放装置本体10上,在空中待命。
38.s6. 参照说明书附图8和说明书附图9,蜂群无人机12四个涵道向机身旋转180
°
达到完全展开,通过四个旋翼的转速匹配来自主调整飞行姿态,稳定在释放装置本体10附近,
然后,单个蜂群无人机12通过机体内置的数据链天线逐个与释放装置本体10建立通信连接,此后的任务中,单个蜂群无人机12将侦察获取的情报通过数据链天线分别发送至释放装置本体10,由释放装置本体10统一决策,并向相应的天线蜂群无人机12下达行动指令。
39.综上所述,本领域的普通技术人员阅读本发明文件后,根据本发明的技术方案和技术构思无需创造性脑力劳动而作出的其他各种相应的变换方案,均属于本发明所保护的范围。