1.本发明设计螺旋桨技术领域,具体涉及一种共轴线分体式对转双桨电动涵道螺旋桨及其控制系统。
背景技术:
2.随着时代的发展,以新型航空发动机技术为代表的未来航空推进技术的发展,将满足人们对安全性、可靠性、环境适应性和经济可承受性的更高要求。自2002年美国nasa展出一架燃料电池驱动的电动飞机样机以来,各类混合油电飞机、全电动飞机研究项目层出不穷。
3.目前,主流的电动飞机主要为稍作、短途的载人飞行器,大多采用单组螺旋桨发动机。而单组桨叶的螺旋桨发动机在高速运转时将带给飞机较大的反向扭转力矩,其桨叶后的滑流流场还将对机翼及尾翼产生不利影响。虽然通过操纵飞机副翼等舵面能够配平反向扭转力矩及滑流的不利影响,但这对飞行控制系统提出了较高的要求,加大了飞机控制的难度。
4.为避免采用单组螺旋桨所造成的的控制难度,载人飞行器可采用两组反向对转螺旋桨同轴串列就能够使两组螺旋桨产生的扭转力矩互相平衡,同时由于同轴反向旋转产生的滑流流场可以相互抵消,减小滑流对机翼及尾翼气动力的不利影响,有助于飞机的飞行稳定性。同时,两组螺旋桨的设计也将提高螺旋桨发动机的推力效率。但传统的反向对转螺旋桨采用同轴输出,需要经过复杂的齿轮传动来达到一轴双输出的结果。但齿轮啮合时将损耗能量,机械传动效率较低,同时齿轮部件也大大增加了共轴双桨发动机的体积及重量,降低了发动机的运行可靠性。此外,两组对转螺旋桨的设计在飞行中将产生更大的噪音。
技术实现要素:
5.本发明的目的在于提供一种共轴线分体式对转双桨电动涵道螺旋桨,采用对转双桨平衡反向扭转力矩的同时,减少滑流对机翼及尾翼气动力的不利影响,提高涵道螺旋桨发动机的推进效率。同时,为避免传统共轴双桨发动机复杂的行星齿轮传动系统,减小涵道螺旋桨发动机的体积及重量,进一步提高涵道螺旋桨发动机的冗余度,采用共轴线分体式的两组螺旋桨对转。同时,涵道罩将大大降低两组螺旋桨产生的噪音,其收缩型的设计也有助于提高电动涵道螺旋桨的推进效率。而双控独立电路根据飞行器所处不同工况下对两组螺旋桨进行独立控制,以确保电动涵道螺旋桨发动机及意外情况下也能够正常工作,确保飞行器飞行安全。
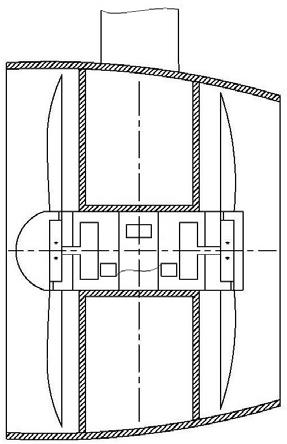
6.为实现上述发明目的,本发明提供如下技术方案:一种共轴线分体式对转双桨电动涵道螺旋桨,包括:涵道罩、机翼连接处、螺旋桨1、主控机、变距结构1、电机1、固定支架1、螺旋桨2、从控机、变距结构2、电机2、飞行检测系统、电机控制装置;所述涵道螺旋桨发动机具有前端与后端两部分,涵道罩定义了所述发动机的中心
轴线,同时也是安装螺旋桨1、螺旋桨2的中心轴线;所述涵道螺旋桨发动机为电动涵道螺旋桨,螺旋桨1、螺旋桨2皆为可变距螺旋桨,两者由电机1、电机2直接驱动;所述飞行检测系统内含两部分:一、针对电机1、电机2的健康检测并反馈,包含:过流检测、过压检测、缺相检测;二、针对飞行情况的检测,主要对飞行高度、飞行速度等数据进行实时监测并反馈;所述电机控制装置内主要包含两部分,主控机端和从控机端,两者可互为通信,负责控制发动机工作模式(双机器工作模式、单机工作模式)。正常飞行情况下,主要由主控机端负责通信。
7.发动机涵道罩为收缩型涵道罩,在增大涵道螺旋桨发动机的气动效率的同时减少叶尖噪音的产生。
8.螺旋桨1、螺旋桨2为一对对转螺旋桨,转向相异,前桨(即螺旋桨1)尺寸较大,后桨(即螺旋桨2)尺寸较小,前后螺旋桨分别为由变距机构1、变距机构2驱动的可变距桨。所述的前向为来流进入涵道螺旋桨发动机的方向;所述螺旋桨1、螺旋桨2对转配合,能够解决单级螺旋桨反扭矩问题的同时,通过级间匹配方式反向旋转的两级螺旋桨各自产生的滑流流场还可以最大程度的相互抵消影响,减小螺旋桨后滑流流场对机翼和尾翼气动力的不利影响,提高了螺旋桨的效率。
9.螺旋桨1、螺旋桨2之间采用独特的级间匹配方式。在前后桨叶共同工作时,飞行检测系统将检测飞行工况并与飞行数据库进行数据匹配,由算法自适应调节螺旋桨的桨距角、转速等级间因素达到最佳的级间匹配。通过算法寻求最优解进而调整桨距角等级间因素,可对前桨流场中的气流分离进行抑制,并能够对前桨滑流流场中涡的能量进行利用,提高整个涵道螺旋桨发动机的推进效率;所述飞行数据库中包含两级螺旋桨级间匹配的数据,数据源于相应发动机的试验结果。
10.螺旋桨1、螺旋桨2对转双桨不同于主流的同轴双桨,是同轴线分体式双桨,双桨安装位置在同一轴线,但非同一输出轴输出控制。
11.螺旋桨1、螺旋桨2分别由双电机(电机1、电机2)独立驱动。双电机采用双独立控制电路,互为备份,能够提高电路控制系统的冗余度。
12.其独特的控制方式,在不同的工况下能够自主通过飞行数据库调节控制涵道螺旋桨发动机形成不同的工作模式:一、双机工作模式:s1飞行器正常飞行:根据飞行器飞行工况,飞行检测系统反馈信号至控制端,经算法结合飞行数据库数据,对电机控制装置进行通信,根据级间匹配算法将两级螺旋桨的桨距角调整为适用当前飞行工况的角度范围内,并控制调节螺旋桨1与螺旋桨2至最佳转速;二、单机工作模式s2 飞行中电机意外停车:由飞行检测系统内过流/过压/缺相检测发现电机1(或电机2)发生故障,此时电机控制装置内由从控机端(或主控机端)负责主要电路通信,控制电机1(或电机2)停车。针对当下飞行工况进行检测并计算所需发动机的推力等参数,由从控机端(或主控机端)直接控制电机2(或电机1)进行输出并对螺旋桨2(或螺旋桨1)进行桨
距角等参数调整,以确保飞行器安全完成飞行任务;s3飞行中“吸鸟”:螺旋桨1因“吸鸟”造成桨叶受损,为避免桨叶在工作中进一步发生损伤、甚至断裂飞出对发动机整体造成致命性损害,由电机控制装置内从控机端代替主控机端进行主要通信控制,发动机由双机工作模式进入单机工作模式,电机1停车,螺旋桨1顺桨。经由飞行检测系统对飞行工况进行检测,由控制端结合飞行算法对当下飞行工况进行计算,由从控机端控制调整螺旋桨2的桨距角及转速,以确保飞行器安全完成飞行任务或中止飞行任务平稳落地。
13.本发明的有益效果是:采用共轴线分体式两级螺旋桨在解决反扭矩问题、减小滑流不利影响、增强发动机推进效率的同时避免了传统共轴双桨发动机所需的复杂齿轮传动,减小了齿轮传动过程中啮合等所带来的能量损耗,提高了涵道螺旋桨发动机的机械效率。同时双电机与双控独立电路的设计有助于针对不同飞行工况调节不同参数,使两组螺旋桨处于最佳工作状态,适应更长续航时间的应用需求。且其双机工作模式与单机工作模式的切换能够大大提高电动涵道螺旋桨发动机的冗余度,提高飞行器的飞行安全。
附图说明
14.图1是本发明一种共轴线分体式对转双桨电动涵道螺旋桨的装置结构图。
15.图2是本发明一种共轴线分体式对转双桨电动涵道螺旋桨的双控独立控制示意图。
具体实施方式
16.下面将参考附图更详细地描述实施方式,附图形成了实施方式的一部分并以图解的方式示出了具体的示例性实施方式。这些实施方式足够详细地被公开,以使本领域技术人员能够实践本发明。然而,实施方式可以不同的形式被实现,并且不应该被解释为限于在这里阐述的实施方式。因此,下面的详细描述不应被视为具有限制意义。
17.本技术的实施方式,所涉及的发动机部件基本上被描绘在附图一中,附图二为所述电动涵道螺旋桨的双控独立控制示意图,针对不同工况下的控制逻辑结合实施例及附图二进行说明。
18.实施例一:飞行器正常飞行——双机工作模式当飞行器处于起飞阶段,由飞行检测系统反馈信号至控制端,控制端根据反馈信号结合飞行数据库数据及级间匹配算法计算出双桨的最佳桨距角及最佳转速,对电机控制装置进行通信,由主控机端接收信号对电机1及从控机进行进一步通信,进而完成对两级螺旋桨的工作参数调整;当飞行器处于巡航阶段,由飞行检测系统对飞行器当下飞行工况进行监测并反馈信号至控制端,控制端根据反馈信号结合飞行数据库及算法计算出当下双桨最佳桨距角及转速,随后对电机控制装置通信,此时主控机端主要负责当前飞行任务中双机协同工作的通信任务,对双桨进行工作参数调整,完成两级螺旋桨的级间匹配。
19.实施例二:
飞行中电机意外停车——单机工作模式飞行器在执行飞行任务中,由飞行检测系统内过流/过压/缺相检测到电机1(或电机2)发生故障,故障信号反馈至此时电机控制装置内由从控机端(或主控机端)负责主要电路通信,控制电机1(或电机2)停车。针对当下飞行工况由飞行检测系统进行检测并反馈至控制端计算出所需发动机双桨的桨距角、转速等工作参数,由从控机端(或主控机端)直接控制电机2(或电机1)对螺旋桨2(或螺旋桨1)进行输出,以确保飞行器安全完成飞行任务。
[0020] 实施例三:飞行中“吸鸟”——单机工作模式螺旋桨1因“吸鸟”造成桨叶受损,为避免桨叶在工作中进一步发生损伤、甚至断裂飞出对发动机整体造成致命性损害,由电机控制装置内从控机端代替主控机端负责主要通信控制,发动机由双机工作模式进入单机工作模式,从控机对主控机进行通信,控制电机1停车、螺旋桨1顺桨。经由飞行检测系统对飞行工况进行检测,由控制端结合算法对当下飞行工况计算出螺旋桨2所需的工作参数,由从控机端控制调整螺旋桨2的桨距角及转速等,以确保飞行器安全完成飞行任务或中止飞行任务平稳落地。
[0021]
以上结合具体实施方式对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。