1.本实用新型涉及无人机技术领域,具体为一种用于城市安全监控的无人机。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。
3.目前,现有技术中的一种城市安全监控用的无人机在日常使用时稍有不慎,就会碰撞到障碍物,从而对无人机的螺旋桨造成损害,现有的无人机虽然有螺旋将保护装置,但是现有的保护装置所具有的保护效果较为不良,不能在发生碰撞时对无人机自行调节飞行方向,从而使无人机容易受到二次伤害,并且现有的无人机的起落架都使固定安装在无人机下端,其起落时会受到较大的冲击力,易造成内部零件的损坏,所以现有的城市安全监控用的无人机具有螺旋桨保护装置效果较差和起落架的缓冲效果较差的缺点。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种用于城市安全监控的无人机,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种用于城市安全监控的无人机,包括中心体,所述中心体的内部通过螺丝固定连接有机臂,所述机臂的上表面固定连接有电机,所述电机的输出轴的外表面固定连接有螺旋桨,所述中心体的内底壁固定连接有蓄电池,所述中心体的下表面转动连接有摄像头,所述机臂的下表面可拆卸连接有安装块,所述安装块的内部滑动连接有保护架,所述保护架的一端固定连接有导杆,所述安装块的内侧壁固定连接有感应器,所述保护架的一端位于导杆的外侧固定连接有第一弹簧,所述机臂的下表面固定连接有红外感应器,所述中心体的下表面固定连接有主支撑腿,所述主支撑腿的一端通过合页转动连接有副支撑腿,所述副支撑腿的一端贯穿有缓冲杆,所述副支撑腿的下表面固定连接有第一支耳,所述第一支耳的内部转动连接有活动块,所述主支撑腿的下表面固定连接有第二支耳。
8.所选的,所述机臂的一端固定连接有连接块,所述连接块的上表面设有螺纹孔,所述连接块的上表面与中心体的内顶壁固定连接。
9.所选的,所述机臂有四个且分别位于中心体的四边的中部,所述主支撑腿有四个且分别位于中心体下表面的四边的中部。
10.所选的,所述保护架的中部设有与红外感应器适配的环形孔,所述保护架的一端固定连接有水平保护架,所述水平保护架的上表面的一侧固定连接有竖直保护架。
11.所选的,所述第二支耳的外表面通过轴杆转动连接有限位滑轨,所述限位滑轨的内侧壁固定连接有第三弹簧。
12.所选的,所述缓冲杆的外表面的一端套接有第二弹簧,所述蓄电池和电机通过导线电性连接,所述摄像头具有夜视功能。
13.(三)有益效果
14.本实用新型提供了一种用于城市安全监控的无人机,具备以下有益效果:
15.1、该用于城市安全监控的无人机,通过保护架的设置,使该用于城市安全监控的无人机具备了有效的保护的效果,在使用的过程中,当保护架碰撞到障碍物时,使保护架的一端对感应器进行挤压,使感应器对无人机发出碰撞信号,使无人机向障碍物的另一方向飞行,从而起到了保护螺旋桨的作用,达到了有效保护螺旋桨的目的。
16.2、该用于城市安全监控的无人机,通过限位滑轨和缓冲杆的设置,使该用于城市安全监控的无人机具备了减缓冲击的效果,在使用的过程中,降落时缓冲杆的下端首先着地,此时主支撑腿和副支撑腿也绕合页进行转动,通过活动块和限位滑轨的作用和第二弹簧与缓冲杆之间的相互作用,见小了落地时的冲击力,从而起到了有效减震的作用,达到了良好缓冲的目的。
附图说明
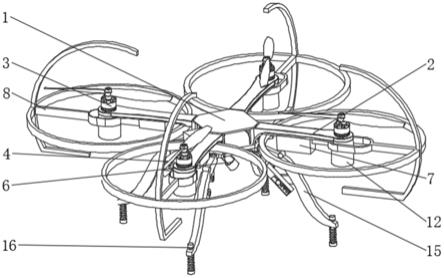
17.图1为本实用新型立体结构示意图;
18.图2为本实用新型前视剖面的结构示意图;
19.图3为本实用新型副支撑腿的结构示意图;
20.图4为本实用新型保护架的结构示意图;
21.图5为本实用新型图2中a处的结构示意图。
22.图中:1、中心体;2、机臂;201、连接块;3、电机;4、螺旋桨;5、蓄电池;6、摄像头;7、安装块;8、保护架;801、环形孔;802、水平保护架;803、竖直保护架;9、导杆;10、感应器;11、第一弹簧;12、红外感应器;13、主支撑腿;14、合页;15、副支撑腿;16、缓冲杆;17、第二弹簧;18、第一支耳;19、活动块;20、第二支耳;21、限位滑轨;22、第三弹簧。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
24.请参阅图1至图5,本实用新型提供技术方案:一种用于城市安全监控的无人机,包括中心体1,中心体1的内部通过螺丝固定连接有机臂2,机臂2 的一端固定连接有连接块201,连接块201的上表面设有螺纹孔,连接块201 的上表面与中心体1的内顶壁固定连接,机臂2有四个且分别位于中心体1 的四边的中部,主支撑腿13有四个且分别位于中心体1下表面的四边的中部,机臂2的上表面固定连接有电机3,电机3的输出轴的外表面固定连接有螺旋桨4,中心体1的内底壁固定连接有蓄电池5,中心体1的下表面转动连接有摄像头6,机臂2的下表面可拆卸连接有安装块7,安装块7的内部滑动连接有保护架8,保护架8的中部设有与红外感应器12适配的环形孔801,保护架8的一端固定连接有水平保护架802,水平保护
架802的上表面的一侧固定连接有竖直保护架803,保护架8的一端固定连接有导杆9,安装块7的内侧壁固定连接有感应器10,保护架8的一端位于导杆9的外侧固定连接有第一弹簧11,机臂2的下表面固定连接有红外感应器12,中心体1的下表面固定连接有主支撑腿13,主支撑腿13的一端通过合页14转动连接有副支撑腿15,副支撑腿15的一端贯穿有缓冲杆16,缓冲杆16的外表面的一端套接有第二弹簧17,蓄电池5和电机3通过导线电性连接,摄像头6具有夜视功能,副支撑腿15的下表面固定连接有第一支耳18,第一支耳18的内部转动连接有活动块19,主支撑腿13的下表面固定连接有第二支耳20,第二支耳20的外表面通过轴杆转动连接有限位滑轨21,限位滑轨21的内侧壁固定连接有第三弹簧22。
25.使用时,将无人机放置在空旷的位置,通过遥控器控制电机3的转动,从而带动螺旋桨4转动,产生向下的推力,从而即可控制无人机的飞行,通过控制不同位置的电机3的转速,从而实现对无人机的转弯的操作,飞行时摄像头6将实时对无人架下方的区域进行拍摄,并将画面实时传输给接收端,当发现问题时,可通过红外感应器12的红外检测功能对无人机下方的移动物体进行跟踪,从而更便于对无人机的操控,当无人机碰撞上障碍物时,保护架8会先接触障碍物,当保护架8的外表面受到碰撞时将向安装块7内部进行挤压,带动导杆9向感应器10进行挤压,从而使感应器10发出信号,当保护架8的上方受到碰撞时,通过竖直保护架803设置为弧形,受到碰撞时也会向安装块7内部进行挤压,使无人机向碰撞方向的另一侧进行飞行,避免了无人机的螺旋桨4受到碰撞从而造成损坏,进而使无人机受到的伤害,极大的增加了无人机的安全性,当无人机使用完毕需要降落时,缓冲杆16的下端将首先着地,通过第二弹簧17的设置减小了无人机下降时的冲击力,对无人机下降过程中进行有效的缓冲,通过副支撑腿15和主支撑腿13之间设置合页14,使副支撑腿15下端着地时可向上升起,向上抬升时副支撑腿15 下表面的活动块19将在限位滑轨21内部滑动,因活动块19与限位滑轨21 内部设有的第三弹簧22产生的挤压作用,可使副支撑腿15向上抬升时进行有效的缓冲,从而对无人机的缓冲效果有了很大的提升。
26.综上,本实用新型通过保护架8的设置,使该用于城市安全监控的无人机具备了有效的保护的效果,在使用的过程中,当保护架8碰撞到障碍物时,使保护架8的一端对感应器10进行挤压,使感应器10对无人机发出碰撞信号,使无人机向障碍物的另一方向飞行,从而起到了保护螺旋桨4的作用,达到了有效保护螺旋桨4的目的,通过限位滑轨21和缓冲杆16的设置,使该用于城市安全监控的无人机具备了减缓冲击的效果,在使用的过程中,降落时缓冲杆16的下端首先着地,此时主支撑腿13和副支撑腿15也绕合页14 进行转动,通过活动块19和限位滑轨21的作用和第二弹簧17与缓冲杆16 之间的相互作用,见小了落地时的冲击力,从而起到了有效减震的作用,达到了良好缓冲的目的。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。