1.本实用新型属于机器人技术领域,具体涉及一种仿生爪刺机械足及应用该机械足的机器人。
背景技术:
2.目前太空垃圾日益增多,太空环境亟待净化。太空垃圾不利于营造安全的太空环境。与直径为10厘米左右的碎片撞击可以直接把新卫星摧毁,同时太空垃圾会在每一次撞击中不断产生更多新的碎片,继而引发更多的碰撞、更多的垃圾,形成滚雪球般的恶性连锁反应。宇宙垃圾现阶段的抓捕手段主要有:机械臂捕捉法、撒网捕捉法、鱼叉捕捉法、风帆捕捉法等。
3.现有的机械足都不能控制宇宙垃圾的状态,只能在其运转缓慢时进行尝试,基于如此的技术现状,提出一种仿生爪刺机械足,利用仿生爪刺结构,实现对高速运动太空碎片的捕捉。
技术实现要素:
4.针对现有技术的不足,本实用新型拟解决的技术问题是,提出一种仿生爪刺机械足及应用该机械足的机器人,该机械足采用昆虫仿生爪刺,以螳螂为原型,具有能提高累积变形的节臂和能卡住物体的勾刺。
5.本实用新型解决所述技术问题采用的技术方案是:
6.一种仿生爪刺机械足,包括动力部分和活动臂,其特征在于,活动臂一方面与动力部分转动连接,另一方面固定连接有爪刺。
7.所述活动臂为具有较高的累积变形能力的结构,具有一定柔性,且同时具有一定强度,在太空抓取碎片时不会发生断臂或损坏,同时能够由于自身较高累积变形能力的存在,使得机械足被撞击后具有一定的活动空间。
8.所述活动臂包括大臂、第一节臂、第二节臂,三者一体成型,依次连接,第二节臂的末端固定连接爪刺,大臂顶端连接动力部分,由动力部分带动活动臂在空间内活动。
9.优选地,所述第一节臂和第二节臂可以采用s”型连续结构、平行四边形连续结构、连续波浪形结构、连续折线形等能够具有较高累积变形能力的结构,方便对较高速度运动中的物体进行抓取。
10.优选地,第一节臂与第二节臂均采用“s”型连续结构,具有一定柔性,能够产生更好的力学性能,在抓取高速碎片时不易产生损坏。可通过调整节臂横向尺寸及“s”形数量适应不同尺寸碎片的抓取。
11.所述动力部分能够为活动臂提供多个方向的运动,如xy方向的运动、单独x方向的运动、单独y方向的运动,甚至可以是空间自由面内的转动。
12.优选地,所述动力部分包括两个舵机,两个舵机的输出轴相互垂直,一个舵机分别放置于两个舵机支架上,两个舵机由四个舵机支架分别固定,四个舵机支架通过连接件相
连,其中一个舵机直接与活动臂的大臂上端相连,控制机械足实现两个垂直方向的运动。
13.本实用新型还保护一种使用上述仿生爪刺机械足的机器人,该机器人包括多个上述的机械足,多个机械足对称安装在机器人本体上。
14.本实用新型机械足应用在空间仿生机器人上,爪刺能对太空中高速碎片进行固定,很好地实现对高速运动太空碎片的捕捉。
15.与现有技术相比,本实用新型的有益效果是:
16.本实用新型提出一种仿生爪刺机械足,通过仿昆虫设计,利用爪刺结构,来捕捉较高速度运动中的物体,能够控制宇宙垃圾的状态,使其能静止下来而被及时捕捉,本技术尤其适用于太空垃圾的清理中,能够实现对高速运动太空碎片的捕捉。
17.本实用新型由动力部分驱动活动臂运动,动力部分可以仅由控制两个方向运动的舵机构成,结构简单、驱动元件少,属于一种易于控制的机械足。该机械足采用柔性结构设计,增加了可靠性和附着力。
18.本技术将爪刺与具有较好累积变形的柔性结构结合能够实现对高速运动太空碎片的捕捉,通过爪刺结构能够实现对高速运动太空碎片的固定,高速运动过程中机械足易与太空碎片出现碰撞,通过“s”型连续柔性节臂能够最大程度地减缓太空碎片对机器人的冲击,爪刺能将碎片进行固定,且被撞击后具有一定的活动空间,节臂材料受力后会发生变形,能够累累积变形,抵抗高速,具有一定柔性,冲击后不会损坏节臂,有效防止高速运动的碎片导致机器人受损现象的发生。
19.本技术中第二节臂采取中空式设计,节约原材料,提升机械足是附着性能,中空设计会增大材料的变形空间,因为刚性强肯定会容易使接触的物体弹开,增大变形空间肯定能在一定程度上提升机械足的附着性能,这在无空气阻力的太空会尤为明显,中空设计也可视为为增强对碎片减速能力的一部分,因为减速就是靠较强的柔性,零件中空也有增强柔性的作用。
20.本技术能用于太空垃圾的捕捉,能用于宇宙中,也可以应用在海洋垃圾清理等需要对具有一定速度物体的抓取场景中。
附图说明
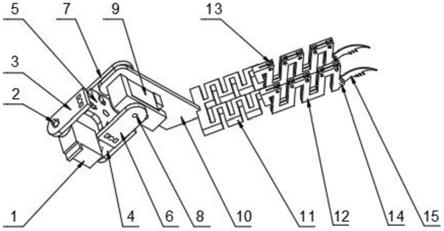
21.图1本实用新型机械足的结构示意图。
22.图2本实用新型大臂、第一节臂、第二节臂的关系示意图。
23.图3本实用新型中一种实施例的连接件的主视结构示意图。
24.图4本实用新型中一种实施例的舵机上支架的主视结构示意图。
25.图5本实用新型中一种实施例的爪刺的外形结构示意图。
26.图中:1—第一舵机 2—第一主动轴 3—舵机上支架 4—舵机下支架 5—连接件 6—舵机前支架 7—舵机后支架 8—第二主动轴 9—第二舵机 10—大臂 11—第一节臂 12—第二节臂 13—空腔 14—螺栓 15—爪刺。
具体实施方式
27.下面结合具体附图及具体实施方式对实用新型的技术方案作进一步说明,并不用于限定本技术的保护范围。
28.本实用新型为一种空间机器人仿生爪刺机械足(参见图1),包括舵机、舵机支架、连接件、大臂、第一节臂、第二节臂、爪刺。一个舵机由两个舵机支架固定,两个舵机设置四个舵机支架,四个舵机支架通过连接件5相连,第二舵机直接与大臂上端相连,控制机械足实现运动。大臂下端与第一节臂上端相连,第一节臂下端与第二节臂相连,第二节臂顶端具有爪刺。
29.第一舵机1输出轴连接第一主动轴2,第一主动轴2与舵机上支架3的下部相连接,舵机上支架3的上部与连接件5相连,当第一舵机1启动后,可带动连接件5做旋转运动。与第一舵机输出轴相对的一侧连接舵机下支架4,舵机下支架4的上部与连接件5相连,随连接件5共同运动,舵机下支架4与第一舵机1的连接处装有轴承,因为连接处放置了轴承,所以第一舵机和舵机下支架4之间的相对转动是自由的,不会相互干扰,因此第一舵机1启动时不会受到舵机下支架4的反作用力。
30.所述连接件5(参见图3)中间设置有镂空孔,四周设置有与相应支架连接固定的榫卯结构,连接件与相应支架通过榫卯方式固定在一起。
31.舵机上支架和舵机下支架对称布置在连接件的两侧,连接件5的另一个相对面分别与舵机前支架6、舵机后支架7相连,第二舵机9输出轴连接第二主动轴8,第二主动轴8与舵机前支架6固定,舵机后支架7与第二舵机9的连接处装有轴承,使第二舵机和舵机后支架之间的相对转动是自由的,不会相互干扰。当第二舵机9启动后,第二舵机9驱动第二主动轴8运动时,由于由于第二主动轴8与舵机前支架固定在一起,第二主动轴8受到舵机前支架6的限制,无法自由转动,第二舵机与舵机后支架又通过轴承连接,所以表现为第二舵机9绕第二主动轴8旋转,即表现为第二舵机9的旋转运动。
32.大臂10和第一节臂11、第二节臂12构成活动臂,大臂的上部设置有舵机槽,第二舵机9与大臂10直接相连,直接固定于大臂10的舵机槽中,因此第二舵机9的运动能够直接带动大臂10做同步运动。
33.第一舵机和第二舵机构成动力部分,二者控制的两个主动轴在空间上互相垂直,能够实现对机械足在空间的自由运动。通过控制第一舵机1及第二舵机9的运动即可实现对此空间机器人仿生爪刺机械足的运动控制。
34.大臂10和第一节臂11、第二节臂12为一体零件(图2所示),大臂运动能够直接带动第一节臂11和第二节臂12的运动,大臂和第一节臂之间的夹角呈钝角,第一节臂整体为水平设置,第二节臂整体呈垂直状态设置,第一节臂和第二节臂均为s型连续结构构成,第二节臂具有空腔,整体为内部空心的s型连续结构,且大臂连接第一节臂的中间部分,第一节臂和第二节臂以大臂连接位置为对称轴分成左右两部分,左右两部分为结构相同的形状,第二节臂左右两部分的末端分别连接一个爪刺。第一节臂和第二节臂连续结构的长度和所用材料以满足应用时的受力要求为准。
35.在第二节臂12末端通过螺栓14固定有爪刺15,爪刺跟随第二节臂12做同步运动。所述爪刺15上设置有多个卡口151和多个尖刺,卡口位置能够将待抓取物卡住,卡口的数量为多个,根爪刺的大小尺寸设置,且卡口的大小可以不同,能够卡住不同厚度尺寸的抓取物。
36.空间机器人仿生爪刺机械足工作原理:
37.控制第一舵机1旋转一定角度,此时第二舵机不启动,通过舵机上、下支架3、4带动
连接件5绕第一主动轴旋转,进而通过舵机前后支架6、7带动第二舵机和大臂一起运动,机械足表现为绕第一主动轴2的旋转运动;控制第二舵机9旋转一定角度,带动与其直接连接的大臂旋转,由于第二舵机两侧轴承和第二主动轴的设置,不会将运动传递给连接件,机械足表现为绕第二主动轴8的旋转运动。
38.当实施对太空碎片的捕捉时,爪刺15结构能固定碎片,爪刺上带有尖刺,能够将目标物卡住,达到固定的目的,第一节臂11、第二节臂12的累积变形结构—“s”型连续结构及第二节臂的空腔13使机械足具有一定柔性,能够起到多方向的缓冲作用,帮助太空碎片减速,防止其对机器人造成过大冲击导致机器人损坏。“s”型连续结构、平行四边形、连续波浪形、连续折线形等结构形式能够使变形累积,空腔能增大单位长度的变形量,进而使得两个节臂具有一定柔性,两个节臂不采用脆性太高的材料,如铸铁材料,可以采用钛合金、铝合金、合金钢等,也可采用聚氨酯等软胶材料所制备出的具有一定刚性的软体。如图2所示,“s”型连续结构在第一节臂是横向设置,在第二节臂是纵向设置,这样可以实现多方向缓冲,通过该空间机器人仿生爪刺机械足就可以实现对高速运动太空碎片的捕捉。
39.本实用新型机械足根据捕捉对象的速度、大小及应用的场景可以合理选择节臂的材料,根据机器人目标抓取物的大小可相应的选择舵机的型号及各部件的尺寸。如捕捉直径1cm大小的太空垃圾时,机械足整体尺寸为20cm左右,第二节臂的空腔壁面厚度为1cm左右。同等条件下,节臂做成空心结构,能够增大形变。
40.本实用新型活动臂一体成型累积效果比较好,不影响传动过程,更方便控制。