1.本实用新型涉及农业领域,具体涉及一种可自动巡航便于装卸的喷洒农药无人机。
背景技术:
2.在现代农业生产中,农药发挥了很大的作用,农药可以消灭害虫,也可以控制植物的生长进程。毫无疑问,农药已经成为现代农业必不可缺的一部分。
3.但是在中国的农药喷洒依旧普遍依靠人力,即使是有些地方已经在生产过程中已经采用了无人机喷洒,但依旧是需要人类去实时的操作无人机,且在装水时极不方便,这样无疑是对人力的极大浪费。
技术实现要素:
4.(一)实用新型目的
5.为解决背景技术中存在的技术问题,本实用新型提出一种可自动巡航且易于装卸的喷洒农药无人机来解决上述问题,具有可快速拆卸更换的储液装置便于补充农药,更好的将人类从辛苦的劳动环境中解放出来。
6.(二)技术方案
7.为解决上述技术问题,本实用新型提供了一种可自动巡航便于装卸的喷洒农药无人机,包括无人机,所述无人机的前端转动安装有摄像头,且所述无人机的顶部安装有定位装置;
8.所述无人机的下方设置有悬架机构,所述悬架机构包括悬挂板、吊杆和安装板,所述悬挂板安装在所述无人机的底部,所述悬挂板的中部安装有所述吊杆,所述吊杆的底部安装有所述安装板,所述安装板的边缘阵列开设有扣槽;
9.所述安装板的下方设置有储液装置,所述储液装置包括储液罐、通水管和卡扣,所述储液罐的顶部开设有贯通的所述通水管,且所述储液罐的顶部边缘阵列安装有凸出的所述卡扣;
10.所述安装板上还设置有喷洒装置,所述喷洒装置包括导液管、支水管和喷洒器,所述导液管的一端贯穿所述通水管,且所述导液管上连接有若干个所述支水管,所述支水管的底部连接有所述喷洒器。
11.优选的,所述储液罐和所述安装板之间通过所述卡扣和所述扣槽卡合固定。
12.优选的,所述导液管贯穿所述通水管的一端贴附所述储液罐底部。
13.优选的,所述喷洒器为高压喷头,且所述喷洒器内置电磁阀。
14.优选的,所述定位装置包括gps定位装置、位置控制装置和通讯模块,gps 定位装置、位置控制装置和通讯模块连接至所述无人机的主板。
15.优选的,所述无人机上安装有重力测量装置。
16.本实用新型的上述技术方案具有如下有益的技术效果:
17.1、储液罐通过卡扣配合扣槽的方式与无人机相连,通过卡扣的方式相连,与传统的联接方式相比更加方便安装与拆卸,从力学的角度来讲,增加了接触面积,可以降低疲劳破坏,延长使用寿命,同时增加补充农药时的便利性。
18.2、摄像头安装在无人机前部,操作人员可以实时观察农药喷洒情况,当发现存在喷洒死角或者是存在超出预定工作区域的地方,可以切换人工控制模式,通过摄像头寻找位置,手动打开电磁阀进行作业。
附图说明
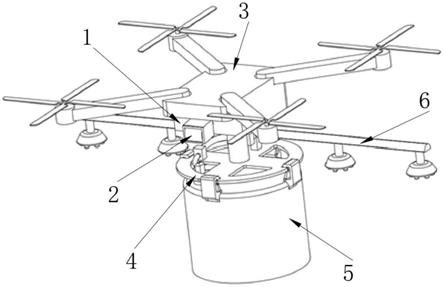
19.图1为本实用新型的结构示意图;
20.图2为本实用新型的悬架机构和喷洒装置结构示意图;
21.图3为本实用新型的储液装置结构示意图;
22.图4为本实用新型的工作流程示意图。
23.附图标记:
24.1、无人机;2、摄像头;3、定位装置;4、悬架机构;41、悬挂板;42、吊杆;43、安装板;44、扣槽;5、储液装置;51、储液罐;52、通水管;53、卡扣;6、喷洒装置;61、导液管;62、支水管;63、喷洒器。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
26.如图1
‑
3所示,本实用新型提出的一种可自动巡航便于装卸的喷洒农药无人机,包括无人机1,无人机1的前端转动安装有摄像头2,摄像头2可以进行 150
°
的定轴旋转,操作人员可以通过摄像头2的转动,来获取更大的视野图像,且无人机1的顶部安装有定位装置3;
27.无人机1的下方设置有悬架机构4,悬架机构4包括悬挂板41、吊杆42和安装板43,悬挂板41安装在无人机1的底部,悬挂板41的中部安装有吊杆42,吊杆42的底部安装有安装板43,安装板43的边缘阵列开设有扣槽44;
28.安装板43的下方设置有储液装置5,储液装置5包括储液罐51、通水管52 和卡扣53,储液罐51的顶部开设有贯通的通水管52,且储液罐51的顶部边缘阵列安装有凸出的卡扣53;
29.安装板43上还设置有喷洒装置6,喷洒装置6包括导液管61、支水管62 和喷洒器63,导液管61的一端贯穿通水管52,且导液管61上连接有若干个支水管62,支水管62的底部连接有喷洒器63(本技术中支水管62共设置四个,两两对称安装,保持无人机1飞行过程中两侧的平衡)。
30.在本实施例中:储液罐51和安装板43之间通过卡扣53和扣槽44卡合固定,储液罐51上四个卡扣53沿圆周分布,间隔90
°
,安装板43上四个扣槽 44同样沿圆周分布,间隔90
°
,在更换时将储液罐51的卡扣53拆离扣槽44,即可进行储液罐51的更换。
31.作为农药在储液装置5和喷洒装置6之间的传输示例:导液管61贯穿通水管52的一端贴附储液罐51底部,在进行农药喷洒时,储液罐51内的农药通过通水管52内贯穿的导液管61吸取农药,将药液传输至各个支水管62,并通过支水管62连接的喷洒器63进行农药的喷洒。
32.需要补充的是:喷洒器63为高压喷头,且喷洒器63内置电磁阀,电磁阀接收电信号后打开,高压喷头开始喷洒农药,电磁阀关闭时,停止喷洒农药。
33.如图1所示,定位装置3包括gps定位装置、位置控制装置和通讯模块, gps定位装置、位置控制装置和通讯模块连接至无人机1的主板,操作人员可以通过通讯模块下发指定到无人机,也可以通过通讯模块接收到无人机上传的实时图像,gps定位装置和位置控制装置主要是确定无人机的当前位置和规划无人机的运动路线。
34.需要补充的是:因为在通讯过程需要涉及到图像的实时传输,需要有较高的传输速率,因此通讯模块选用4g通讯模块,操作人员可以通过此模块实时的下发指令,来操作无人机。也可以通过此模块获取摄像头2采集到的现场照片,进行作业监督.
35.需要说明的是:无人机1上安装有重力测量装置,对无人机1整体重量进行监测,当重力低于设定值,即代表储液罐中水缺失,无人机会自动返回加水。
36.如图4所示,喷洒农药无人机的工作流程为:
37.步骤一、操作人员通过手机端设置工作区域和工作起点,将指令下发给定位装置3,无人机会通过gps确定自己现在的位置,并规划到工作起点以及作业时的运动轨迹;
38.步骤二、喷洒装置6与储液装置5之间通过通水管连接,当gps定位装置检测到无人机到达工作起点后,将会产生一个电信号,电磁阀接收电信号后打开,高压喷头开始喷洒农药;
39.步骤三、当gps定位装置监测到无人机1离开工作区域时,电磁阀关闭,停止喷洒农药;
40.步骤四、通过重力测量装置来检测储液罐51中的余量,当重力低于预定设计值,则表明此时储液罐中余量不足,记录下此位置,并将其设置为下一次作业起点,便返航至加水点,加水完成后返回记录的作业起点位置,开始作业,从而无人机实现自动巡航功能。
41.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。