1.本实用新型属于巡检无人机技术领域,具体为一种红外成像固定翼巡检搜救无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,搜救无人机属于无人机的一种类型,现有的搜救无人机因意外坠落或转运时,悬挂在无人机下方的红外感应装置容易因与外物撞击而损坏,降低了搜救无人机正常的使用寿命,且现有的搜救无人机在降落时,搜救无人机与地面接触时会产生较大的冲击力,使得该搜救无人机可能因冲击而损坏,因此需要一种具有防护功能的红外成像固定翼巡检搜救无人机来解决上述问题。
技术实现要素:
3.(一)解决的技术问题
4.为了克服现有技术的上述缺陷,本实用新型提供了一种红外成像固定翼巡检搜救无人机,解决了现有的搜救无人机因意外坠落或转运时,悬挂在无人机下方的红外感应装置容易因与外物撞击而损坏,降低了搜救无人机正常的使用寿命,且现有的搜救无人机在降落时,搜救无人机与地面接触时会产生较大的冲击力,使得该搜救无人机可能因冲击而损坏的问题。
5.(二)技术方案
6.为实现上述目的,本实用新型提供如下技术方案:一种红外成像固定翼巡检搜救无人机,包括无人机本体,所述无人机本体的下表面卡接有壳体,所述壳体内壁的上表面与电动推杆的顶端固定连接,所述电动推杆的底端与活动板的上表面固定连接,所述活动板下表面的四角均通过销轴分别与四个连接杆的顶端铰接。
7.所述连接杆的底端通过销轴与挡板的上表面铰接,所述活动板的下表面与红外感应装置的顶端固定连接,所述挡板的正面和背面分别与壳体内壁的相对面搭接,所述无人机本体内壁的上表面与四个缓冲机构的顶端固定连接,四个缓冲机构的底端与底板的上表面固定连接。
8.作为本实用新型的进一步方案:所述活动板上表面的四角均固定连接有导向杆,四个导向杆的顶端与壳体内壁的上表面固定连接。
9.作为本实用新型的进一步方案:所述挡板的数量设置为两个,位于左侧挡板的右侧面开设有卡槽,位于右侧挡板的左侧面固定连接有卡板,所述卡板和卡槽的位置相对应。
10.作为本实用新型的进一步方案:所述挡板内均设置有两个限位杆,四个限位杆相远离的一端分别与壳体内壁的相对面固定连接。
11.作为本实用新型的进一步方案:所述缓冲机构包括伸缩杆,所述伸缩杆的外表面
套接有弹簧,所述伸缩杆和弹簧的两端分别与底板和无人机本体的相对面固定连接。
12.作为本实用新型的进一步方案:所述底板的上表面开设有通孔,所述通孔的位置和壳体的位置相对应。
13.作为本实用新型的进一步方案:所述底板的外表面卡接有气垫圈,所述气垫圈的材质设置为橡胶。
14.(三)有益效果
15.与现有技术相比,本实用新型的有益效果在于:
16.1、该红外成像固定翼巡检搜救无人机,通过设置电动推杆、活动板、红外感应装置、挡板和连接杆,控制电动推杆收缩,电动推杆通过活动板带动红外感应装置向上运动,当红外感应装置运动到壳体内合适的位置时,同时活动板通过连接杆和两个挡板带动卡板卡进卡槽内,相对于现有的搜救无人机,该无人机在意外坠落或转运时,红外感应装置可收进壳体内,使得红外感应装置不会与外物接触,使得设置在壳体内的红外感应装置不会受到损害,保证了该红外感应装置正常的使用寿命。
17.2、该红外成像固定翼巡检搜救无人机,通过设置弹簧、伸缩杆和底板,当底板与地面接触时,底板带动伸缩杆收缩,套接在伸缩杆外表面的弹簧收缩,收缩的弹簧可对降落时产生的冲击力进行吸收,使得该无人机不会因冲击力而受到损害,保证了该无人机正常的使用寿命。
18.3、该红外成像固定翼巡检搜救无人机,通过设置导向杆,因导向杆的两端分别与活动板和壳体内壁的相对面连接,使得导向杆可对活动板进行限位,使得活动板在运动时不会发生晃动,使得电动推杆可通过活动板带动红外感应装置平稳的进行运动。
附图说明
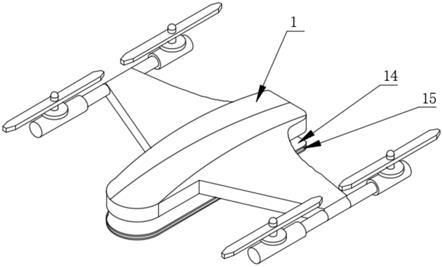
19.图1为本实用新型立体的结构示意图;
20.图2为本实用新型无人机本体正视的剖面结构示意图;
21.图3为本实用新型壳体仰视立体的结构示意图;
22.图4为本实用新型壳体爆炸的结构示意图;
23.图中:1无人机本体、2壳体、3电动推杆、4活动板、5红外感应装置、6导向杆、7连接杆、8挡板、9限位杆、10卡槽、11卡板、12缓冲机构、121伸缩杆、122弹簧、13通孔、14底板、15气垫圈。
具体实施方式
24.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
25.如图1
‑
4所示,本实用新型提供一种技术方案:一种红外成像固定翼巡检搜救无人机,包括无人机本体1,无人机本体1的下表面卡接有壳体2,壳体2内壁的上表面与电动推杆3的顶端固定连接,通过设置电动推杆3,工作人员控制电动推杆3工作,电动推杆3可通过活动板4带动红外感应装置5从壳体2内移出,通过设置销轴,使得连接杆7可绕着销轴转动,电动推杆3的底端与活动板4的上表面固定连接,活动板4下表面的四角均通过销轴分别与四个连接杆7的顶端铰接。
26.连接杆7的底端通过销轴与挡板8的上表面铰接,通过设置挡板8,使得两个挡板8
可对壳体2的底端进行遮挡,使得外界的灰尘不会进入壳体2内,使得红外感应装置5不易在壳体2内附着有灰尘,活动板4的下表面与红外感应装置5的顶端固定连接,挡板8的正面和背面分别与壳体2内壁的相对面搭接,无人机本体1内壁的上表面与四个缓冲机构12的顶端固定连接,四个缓冲机构12的底端与底板14的上表面固定连接。
27.具体的,如图1所示,底板14的外表面卡接有气垫圈15,气垫圈15的材质设置为橡胶,通过设置气垫圈15,当该无人机因意外坠落到水面上时,气垫圈15可为其提供向上的浮力,使得该无人机不易沉入水下,使得工作人员可方便的对无人机进行搜寻。
28.具体的,如图2所示,缓冲机构12包括伸缩杆121,伸缩杆121的外表面套接有弹簧122,伸缩杆121和弹簧122的两端分别与底板14和无人机本体1的相对面固定连接,底板14的上表面开设有通孔13,通孔13的位置和壳体2的位置相对应,通过设置伸缩杆121,伸缩杆121可对底板14进行限位,使得底板14在运动时不会发生晃动,使得底板14可在运动时平稳的进行运动。
29.具体的,如图3和图4所示,挡板8内均设置有两个限位杆9,四个限位杆9相远离的一端分别与壳体2内壁的相对面固定连接,通过设置限位杆9,限位杆9可对挡板8进行限位,使得挡板8在运动时不会发生晃动,使得挡板8可在连接杆7的作用下平稳的进行运动,使得卡板11可精准的卡进卡槽10内。
30.具体的,如图4所示,活动板4上表面的四角均固定连接有导向杆6,四个导向杆6的顶端与壳体2内壁的上表面固定连接,挡板8的数量设置为两个,位于左侧挡板8的右侧面开设有卡槽10,位于右侧挡板8的左侧面固定连接有卡板11,卡板11和卡槽10的位置相对应,通过设置卡板11和卡槽10,因卡板11卡接在卡槽10内,卡板11和卡槽10相互配合可对两个挡板8之间的间隙进行遮挡,使得外界的水分不会通过该间隙进入壳体2内,使得设置在壳体2内的红外感应装置5不易因与水流接触而损害。
31.本实用新型的工作原理为:
32.s1、当该搜救无人机意外坠落或转运时,控制电动推杆3收缩,电动推杆3带动活动板4向上运动,活动板4带动红外感应装置5向上运动,同时活动板4通过连接杆7带动两个挡板8相互靠近,当红外感应装置5运动到壳体2内合适的位置时,两个挡板8带动卡板11卡进卡槽10内;
33.s2、当该搜救无人机在工作时,控制电动推杆3伸长,电动推杆3带动活动板4向下运动,活动板4带动红外感应装置5向下运动,同时活动板4通过连接杆7带动两个挡板8相互远离,挡板8沿着限位杆9的轴向方向运动,两个挡板8分别带动卡槽10和拉板相互远离,使得卡板11从卡槽10内移出,当两个挡板8运动到合适的位置时,红外感应装置5从两个挡板8之间的间隙从壳体2内移出,控制红外感应装置5工作,红外感应装置5对外界的环境进行监测。
34.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
35.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方
式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。