1.本实用新型涉及大型装备装配技术领域,具体涉及一种自动对接及锁紧机构。
背景技术:
2.随着先进的航天航空技术在生产中不断得到应用,对航天设备的要求也越来越高。为了和航天工艺相适应,航天航空设备装置也在向大型及生产环境较为苛刻的高温高压的方向发展;由于雷达、飞机、卫星等装备一般尺寸大,因而,在设计和制造过程中通常分为若干段,最后总装成型。
3.对接作为总装阶段的关键环节,直接影响大型装备的整体制造技术水平。目前,大型装备对接总装主要以手工装配为主,效率低,周期长,且装配质量一致性差,不能满足大型装备高精度、高效率和高可靠性生产的需要。
技术实现要素:
4.为克服现有技术的缺陷,本实用新型的目的在于提供一种自动对接及锁紧机构,以能满足大型装备高精度、高效率和高可靠性生产的需要。
5.为此,本实用新型提出了一种自动对接及锁紧机构,包括固定装置、移动装置、以及紧固拉杆;所述固定装置包括固定套筒和若干边缘凹槽,所述固定套筒顶端设有限位凹槽,所述限位凹槽的断面呈“一”字形;所述移动装置包括移动套筒和若干边缘顶针,所述移动套筒内圈侧边上设有限位凸台;紧固拉杆包括顶部凸柄和杆身凹槽;所述顶部凸柄形状和所述限位凹槽配合,所述杆身凹槽设置在所述紧固拉杆外圆柱面上,为内凹槽。
6.其中,所述移动套筒轴向移动并与所述固定套筒配合,共同完成轴向定位,所述边缘凹槽与所述边缘顶针配合,共同完成周向定位;所述杆身凹槽与所述限位凸台配合,所述紧固拉杆带动移动套筒做轴向运动,直至所述顶部凸柄卡在所述限位凹槽内,完成所述固定装置与所述移动装置之间的对接锁紧。
7.进一步,所述边缘凹槽设置有个,矩形阵列分布在所述固定套筒外侧,所述边缘凹槽形状为内凹球形,用于限定对接过程中的周向运动。
8.进一步,所述边缘顶针呈矩形这列分布在移动套筒四周,所述边缘顶针包括顶针、与顶针连接的调节机构,所述顶针形状与所述边缘凹槽配合。
9.进一步,所述调节机构采用螺杆、螺母垫圈结构,用于调整顶针的高度。
10.进一步,所述边缘凹槽和所述顶针均设有两个,且所述边缘凹槽形状为内凹方形,所述顶针形状与所述边缘凹槽形状相匹配。
11.进一步,所述杆身凹槽由三段组成,两段沿母线方向平行,第三段弧线凹槽连接两平行凹槽。
12.进一步,所述限位凸台和所述杆身凹槽均设有两个,且一对所述杆身凹槽关于所述紧固拉杆的中心轴线对称分布,所述限位凸台关于移动套筒中心轴线对称分布。
13.进一步,所述限位凹槽的断面呈“+”型,且所述顶部凸柄的形状与所述限位凹槽相
匹配,用于限制所述紧固拉杆的周向转动。
14.进一步,所述限位凸台形状为立方体或圆柱体。
15.本实用新型提供的自动对接及锁紧机构,相比于人工对接具有明显的优势,其以机械自动化为依托,用一套对接工装完成两段装备之间的对接并锁紧,从而更好更快地完成产品的装配任务,提高产品装配的质量,缩短产品设计和制造周期,并且极大的减轻现场技术工人的劳动强度。
16.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
17.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
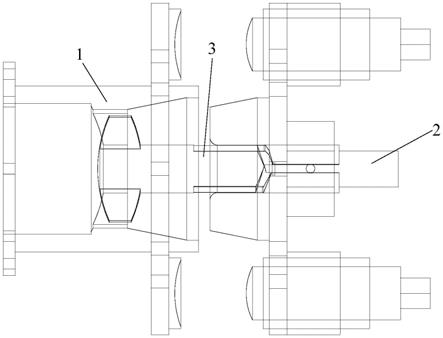
18.图1为本实用新型的自动对接及锁紧机构的装配示意图;
19.图2为本实用新型的自动对接及锁紧机构中固定装置的立体结构示意图;
20.图3为本实用新型的自动对接及锁紧机构中固定装置的侧视结构示意图;
21.图4为本实用新型的自动对接及锁紧机构中固定装置的a
‑
a剖视图;
22.图5为本实用新型的自动对接及锁紧机构中移动装置的结构示意图;
23.图6为本实用新型的自动对接及锁紧机构中移动装置的剖视图;
24.图7为本实用新型的自动对接及锁紧机构中紧固拉杆的结构示意图;
25.图8为本实用新型的自动对接及锁紧机构中紧固拉杆的前视图
26.图9为本实用新型的自动对接及锁紧机构的初始状态侧视图;
27.图10为本实用新型的自动对接及锁紧机构的初始状态剖视图;
28.图11为本实用新型的自动对接及锁紧机构的最终锁紧状态侧视图;
29.图12为本实用新型的自动对接及锁紧机构的最终锁紧状态剖视图。
30.附图标记说明
31.1、固定装置;2、移动装置;3、紧固拉杆;11、固定套筒;12、边缘凹槽;111、限位凹槽;21、移动套筒;22、边缘顶针;211、限位凸台;221、顶针;222、调节机构;31、顶部凸柄;32、杆身凹槽。
具体实施方式
32.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
33.如图1所示,本实用新型的自动对接及锁紧机构,包括:一个固定装置1、一个移动装置2以及一个紧固拉杆3;固定装置1固定于待对接物体(雷达、飞机、卫星骨架静止部分)上,形成静止系统,移动装置2固定于移动物体(雷达、飞机、卫星骨架移动部分)上,形成移动系统,固定装置1与移动装置2对接,并通过紧固拉杆3进行锁紧。
34.具体地,如图2~图4所示,固定装置1包括固定套筒11和若干边缘凹槽12,边缘凹槽12数量为4个,矩形阵列分布在固定套筒11外侧,边缘凹槽12形状为内凹球形,用于限定
对接过程中的周向运动。固定套筒11内部大致呈圆柱形,顶端设有限位凹槽111,限位凹槽111的断面呈“一”字形。
35.如图5、图6所示,移动装置2包括移动套筒21和若干边缘顶针22,移动套筒21内圈侧边上设有一对限位凸台211。其中,限位凸台211形状为立方体或者圆柱体或其它突起形状。
36.边缘顶针22呈矩形这列分布在移动套筒21四周,边缘顶针22包括顶针221和与顶针221连接的调节机构222,顶针221形状与固定装置1中的边缘凹槽12配合,调节机构222采用螺杆、螺母垫圈结构,用于调整顶针221的高度。
37.如图7、图8所示,紧固拉杆3包括顶部凸柄31和一对杆身凹槽32;顶部凸柄31形状和固定套筒11顶端的限位凹槽111配合。
38.杆身凹槽32设置在紧固拉杆3外圆柱面上,为内凹槽,由3段组成,2段沿母线方向平行,第三段弧线凹槽连接两平行凹槽,且一对杆身凹槽32关于紧固拉杆3的中心轴线对称分布。
39.移动装置2快速靠近固定装置1,由固定套筒11和移动套筒21共同完成轴向定位,边缘凹槽12和边缘顶针22共同完成周向定位。
40.紧固拉杆3在轴向外力以及限位凸台211的作用下,沿轴向和周向运动。其中,杆身凹槽32与限位凸台211配合,紧固拉杆3带动移动套筒21做轴向和周向运动,直至顶部凸柄31卡在限位凹槽111内,完成固定装置1与移动装置2之间的连接锁紧。
41.在一实施例中,边缘凹槽12数量为2个或3个,边缘凹槽12形状为内凹方形等,用于限定对接过程中的周向运动。
42.在另一实施例中,限位凹槽111的断面还可以是“+”型,或其他可以限制轴类零件周向运动的特征,并且紧固拉杆3中顶部凸柄31的形状与限位凹槽111相匹配,用于限制紧固拉杆3的周向转动。
43.下面结合附图简述本实用新型的工作原理和工作过程。
44.工作状态时,先将固定装置1安装于雷达骨架上,并且和该部分骨架一起保持静止。再将移动装置2安装于雷达骨架另一部分上,并且跟随该部分一起移动。
45.对接过程中,如图9、图10所示,移动装置2带动雷达骨架快速运动至固定装置1的雷达骨架附近。其次,依靠固定装置1上固定套筒11和移动装置2上移动套筒21的定位作用,实现雷达骨架的轴向定位。最后,依靠固定装置1上边缘凹槽12和移动装置2上顶针221的配合,实现对接雷达骨架的周向定位。
46.如图11、图12所示,紧固拉杆3在外力作用下,做轴向运动,同时,由于杆身上杆身凹槽32以及移动套筒21内部的限位凸台211相互配合作用,做周向运动。最后,紧固拉杆3的顶部凸柄31卡在固定装置1的限位凹槽111内,实现锁紧。
47.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。