1.本实用新型属于无人机领域,尤其涉及一种无人机对转换向器及无人机。
背景技术:
2.本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
3.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
4.发明人发现,在无人机的使用过程中,需要使用到螺旋桨进行驱动或执行动作,现有的无人机一般为单螺旋桨或是双桨进行驱动,单桨驱动时就会产生反扭,不利于无人机的飞行使用;采用双桨使用时,则会因为双驱动电机增大无人机的重量,导致无人机负载过重,无人机飞行时惯性大,不利于飞行转向,同时驱动电机安装在两侧,导致无人机重心不稳,不利于无人机的动作执行。
技术实现要素:
5.为了解决上述背景技术中存在的技术问题,本实用新型的第一个方面提供一种无人机对转换向器,其通过外部驱动电机带动轴承组件内的驱动轴转动,驱动轴带动驱动齿转动,驱动齿啮合连接两个从动齿,两个从动齿分别带动两个从动轴转动杆,从动轴带动桨座和螺旋桨一起转动,从而实现换向驱动的目的,且能够保证无人机的双桨驱动。
6.为了实现上述目的,本实用新型采用如下技术方案:
7.一种无人机对转换向器,其包括轴承组件、驱动轴、驱动齿、从动齿和从动轴,所述驱动齿套设在驱动轴的一端,所述轴承组件安装在驱动轴的另一端外侧,两个从动齿啮合在所述驱动齿的外侧,所述从动轴穿设在从动齿内。
8.作为一种实施方式,所述从动轴上靠近从动齿一端安装有第一轴承。
9.作为一种实施方式,所述第一轴承外侧安装有轴承座。
10.作为一种实施方式,所述轴承组件靠近驱动齿一端外侧安装有齿轮箱,所述轴承座安装在齿轮箱的两端,且轴承座位于轴承组件相邻的两侧。
11.作为一种实施方式,所述驱动轴远离驱动齿轮的一端连接有外部驱动电机,所述驱动电机安装在轴承组件的外侧。
12.作为一种实施方式,所述从动轴远离从动齿的一端安装有第二轴承。
13.作为一种实施方式,所述第二轴承外侧一端安装有桨座,所述桨座外侧一端安装有螺旋桨。
14.作为一种实施方式,所述驱动轴与两个从动轴呈t型结构
15.作为一种实施方式,所述齿轮箱上端设置为镂空结构。
16.本实用新型的第二个方面提供一种无人机,其包括如上述所述的无人机对转换向器。
17.本实用新型的有益效果是:
18.(1)本实用新型实施例的无人机对转换向器,通过外部驱动电机带动轴承组件内的驱动轴转动,驱动轴带动驱动齿转动,驱动齿啮合连接两个从动齿,两个从动齿分别带动两个从动轴转动杆,从动轴带动桨座和螺旋桨一起转动,从而实现换向驱动的目的,且保证了无人机的双桨驱动;
19.(2)本实用新型实施例的无人机对转换向器,将外部电机安装到无人机上,实现了同时驱动两个螺旋桨,便于螺旋桨的驱动,同时两个从动轴转动的方向相反,两个螺旋桨转动的方向也会相反,两个方向相反的桨同时转动,避免了反扭的作用力,有利于螺旋桨的转动,有利于无人机的使用;
20.(3)本实用新型实施例的无人机对转换向器,采用t型换向结构,从而减少驱动电机的数量,进而减轻无人机的重量,减小了无人机的惯性,便于无人机的转向使用;同时采用一个驱动电机,可以将驱动电机安装在无人机中部位置,进而平衡无人机的重心,便于无人的翻滚动作执行;从齿轮为可拆卸结构,通过跟换从动齿可以改变输出螺旋桨部分的转速和扭距,有利于螺旋桨的转动,便于无人机的使用。
21.本实用新型附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
22.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
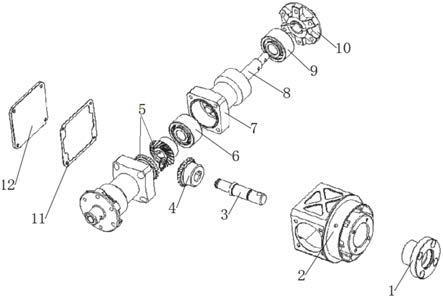
23.图1是本实用新型实施例的无人机对转换向器爆炸结构示意图;
24.图2是本实用新型实施例的无人机对转换向器组合结构示意图;
25.图3是本实用新型实施例的无人机对转换向器中齿轮箱的结构示意图。
26.其中,1、轴承组件;2、齿轮箱;3、驱动轴;4、驱动齿;5、从动齿;6、第一轴承;7、轴承座;8、从动轴;9、第二轴承;10、桨座;11、密封垫;12、齿轮箱端盖。
具体实施方式
27.下面结合附图与实施例对本实用新型作进一步说明。
28.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
29.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或
“
包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
30.在本实用新型中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本实用新型各部件或元件结构关系而确定的关系词,并非特指本实用新型中任一部件或元件,不能理解为对本实用新型的限制。
31.本实用新型中,术语如“固接”、“相连”、“连接”等应做广义理解,表示可以是固定连接,也可以是一体地连接或可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的相关科研或技术人员,可以根据具体情况确定上述术语在本实用新型中的具体含义,不能理解为对本实用新型的限制。
32.实施例一
33.如图1
‑
图3所示,本实施例的无人机对转换向器,包括轴承组件1、驱动轴3、驱动齿4、从动齿5和从动轴8,所述驱动齿4套设在驱动轴3的一端,所述轴承组件1安装在驱动轴3的另一端外侧,两个从动齿5啮合在所述驱动齿4的外侧,所述从动轴8穿设在从动齿5内。
34.从动轴8上靠近从动齿5一端安装有第一轴承6,第一轴承6外侧安装有轴承座7;驱动轴3远离驱动齿轮4的一端连接有外部驱动电机,驱动电机安装在轴承组件1的外侧。
35.通过外部驱动电机带动轴承组件1内的驱动轴3转动,驱动轴3带动驱动齿4转动,驱动齿4啮合连接两个从动齿5,两个从动齿5分别带动两个从动轴8转动杆,从而实现换向驱动的目的。
36.在具体实施中,从动轴8远离从动齿5的一端安装有第二轴承9,第二轴承9外侧一端安装有桨座10,桨座10外侧一端安装有螺旋桨;从动轴8带动桨座10和螺旋桨一起转动,保证了无人机的双桨驱动,将外部电机安装到无人机上,实现了同时驱动两个螺旋桨,便于螺旋桨的驱动,同时两个从动轴8转动的方向相反,两个螺旋桨转动的方向也会相反,两个方向相反的桨同时转动,避免了反扭的作用力,有利于螺旋桨的转动,有利于无人机的使用。
37.具体地,轴承组件1靠近驱动齿4一端外侧安装有齿轮箱2,轴承座7安装在齿轮箱2的两端,且轴承座7位于轴承组件1相邻的两侧;驱动轴3与两个从动轴8呈t型结构,齿轮箱2上端设置为镂空结构。
38.本实施例采用t型换向结构,从而减少驱动电机的数量,进而减轻无人机的重量,减小了无人机的惯性,便于无人机的转向使用;同时采用一个驱动电机,可以将驱动电机安装在无人机中部位置,进而平衡无人机的重心,便于无人的翻滚动作执行。
39.齿轮箱2远离轴承组件1的一端安装有齿轮箱端盖12,齿轮箱端盖12与齿轮箱2之间安装有密封垫11;通过密封垫11的设置,有利于齿轮箱2与齿轮箱端盖12之间的密封,便于齿轮的维护,有利于换向器的使用。
40.本实施例的该无人机对转换向器的工作原理为:
41.在本实施例的该无人机对转换向器的实际应用时,通过外部驱动电机带动轴承组件1内的驱动轴3转动,驱动轴3带动驱动齿4转动,驱动齿4啮合连接两个从动齿5,两个从动齿5分别带动两个从动轴8转动杆,从动轴8带动桨座10和螺旋桨一起转动,从而实现换向驱动的目的,且保证了无人机的双桨驱动;
42.将外部电机安装到无人机上,实现了同时驱动两个螺旋桨,便于螺旋桨的驱动,同
时两个从动轴8转动的方向相反,两个螺旋桨转动的方向也会相反,两个方向相反的桨同时转动,避免了反扭的作用力,有利于螺旋桨的转动,有利于无人机的使用;
43.本本实施例中,采用t型换向结构,从而减少驱动电机的数量,进而减轻无人机的重量,减小了无人机的惯性,便于无人机的转向使用;同时采用一个驱动电机,可以将驱动电机安装在无人机中部位置,进而平衡无人机的重心,便于无人的翻滚动作执行;
44.本本实施例中,从齿轮为可拆卸结构,通过跟换从动齿5可以改变输出螺旋桨部分的转速和扭距,有利于螺旋桨的转动,便于无人机的使用。
45.实施例二
46.本实施例提供了一种无人机,其包括如上述实施例一所述的无人机对转换向器。
47.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。