1.本发明涉及涵道飞行器领域,尤其涉及一种涵道飞行器控制结构及其控制方法。
背景技术:
2.涵道飞行器因为具有高度安全性,并且涵道可以保证在相对高的速度下由涵道内的螺旋桨提供推力而广泛应用于飞行器动力系统。相比于传统涵道无人飞行器,单涵道飞行器在减小飞行器的径向空间的同时具有更高的控制灵活性。
3.飞行控制系统是飞机的关键功能承载系统,其可靠性直接关系到飞机的飞行可靠性和安全可靠性。目前,存在民用无人机安全使用问题突出、飞行控制等核心系统低水平重复、常规多旋翼构型应用领域窄等问题。因此,如何提供一种操纵灵活、安全性高、适用范围广的涵道飞行器控制方式成为了本领域技术人员需要解决的技术问题。
技术实现要素:
4.本发明的目的在于提供一种适用范围广、操纵灵活的涵道飞行器控制结构及其控制方法。
5.为解决上述技术问题,本发明采用如下技术方案:
6.本发明一种涵道飞行器控制结构,包括自上而下设置在涵道内的螺旋桨、反扭叶片和控制舵面;由发动机驱动螺旋桨提供主升力,螺旋桨的旋转轴为机体z轴,主升力方向始终与机体z轴重合;反扭叶片与涵道固定,不能旋转,主要用于平衡桨叶在旋转过程中产生与旋转方向互逆的气动扭矩;控制舵面包括四组气动舵面,分别为第一控制舵面、第二控制舵面、第三控制舵面和第四控制舵面,所述第一控制舵面、第二控制舵面、第三控制舵面和第四控制舵面在水平面内沿圆周顺序排列;四组气动舵面均匀分布在水平面内,每一组气动舵面由一个电机进行单独控制,每一组气动舵面都可单独控制其姿态,从而提供飞行器所需的各种力矩。
7.进一步的,每组气动舵面均包括三个叶片,每组气动舵面中的三个叶片旋转方向和角度都是一致的;但每组气动舵面的旋转方向并不相同,以此产生各种力矩来控制飞行器的姿态。
8.一种涵道飞行器控制方法,采用如上述的涵道飞行器控制结构,在水平面内设定x、y轴,第一控制舵面和第三控制舵面的旋转轴方向为y轴,第二控制舵面和第四控制舵面的旋转轴方向为x轴;涵道飞行器俯仰控制力矩控制由第一控制舵面和第三控制舵面同偏生成;当第一控制舵面和第三控制舵面同时绕y轴正偏转时,产生体轴负俯仰力矩;当第一控制舵面和第三控制舵面同时绕y轴负偏转时,产生体轴正俯仰力矩。
9.进一步的,涵道飞行器滚转控制力矩控制由第二控制舵面和第四控制舵面同偏生成;当第二控制舵面和第四控制舵面同时绕x轴正偏转时,产生体轴负滚转力矩;当第二控制舵面和第四控制舵面同时绕x轴负偏转时,产生体轴正滚转力矩。
10.再进一步的,涵道飞行器偏航控制力矩控制由第一控制舵面和第三控制舵面差偏
与第二控制舵面和第四控制舵面差偏生成,第一控制舵面和第三控制舵面差偏与第二控制舵面和第四控制舵面差偏产生的力矩需一致;当第一控制舵面绕y轴正偏转、第三控制舵面绕y轴负偏转、第二控制舵面绕x轴正偏转、第四控制舵面绕x轴负偏转时,会产生体轴正偏航力矩;当第一控制舵面绕y轴负偏转、第三控制舵面绕y轴正偏转、第二控制舵面绕x轴负偏转、第四控制舵面绕x轴正偏转时,会产生体轴负偏航力矩。
11.再进一步的,涵道飞行器在需要组合力矩时,第一控制舵面、第二控制舵面、第三控制舵面和第四控制舵面所需偏转按照俯仰力矩、滚转力矩和偏航力矩定义的偏转进行叠加后生成。
12.与现有技术相比,本发明的有益技术效果如下:
13.本发明一种涵道飞行器控制结构,采用单涵道结构,使得飞行器结构紧凑,径向空间占用小,适用范围大大增加;一种涵道飞行器控制方法,采用反扭叶片和四组气动舵面的形式对飞行器进行控制,显著提高了飞行器的操纵灵活性。
附图说明
14.下面结合附图说明对本发明作进一步说明。
15.图1是本发明涵道飞行器总体方案示意图;
16.图2是本发明涵道飞行器控制舵面三维图;
17.图3是本发明涵道飞行器气动舵面分布示意图;
18.图4是本发明涵道飞行器俯仰力矩生成示意图;
19.图5是本发明涵道飞行器滚转力矩生成示意图;
20.图6是本发明涵道飞行器偏航力矩生成示意图。
21.附图标记说明:1、第一控制舵面;2、第二控制舵面;3、第三控制舵面;4、第四控制舵面;5、螺旋桨;6、反扭叶片;7、控制舵面。
具体实施方式
22.下面结合附图以及具体实施方式进一步说明本发明。
23.如图1、2所示,一种涵道飞行器控制结构的其中一种具体实施例,包括自上而下设置在涵道内的螺旋桨5、反扭叶片6和控制舵面7;由发动机驱动螺旋桨5提供主升力,螺旋桨5的旋转轴为机体z轴,主升力方向始终与机体z轴重合.反扭叶片6与涵道固定,不能旋转,主要用于平衡桨叶在旋转过程中产生与旋转方向互逆的气动扭矩。控制舵面7包括四组气动舵面,分别为第一控制舵面1、第二控制舵面2、第三控制舵面3和第四控制舵面4,所述第一控制舵面1、第二控制舵面2、第三控制舵面3和第四控制舵面4在水平面内沿圆周顺序排列。四组气动舵面均匀分布在水平面内,每一组气动舵面由一个电机进行单独控制,每一组气动舵面都可单独控制其姿态,从而提供飞行器所需的各种力矩。每组气动舵面均包括三个叶片,每组气动舵面中的三个叶片旋转方向和角度都是一致的。但每组气动舵面的旋转方向并不相同,以此产生各种力矩来控制飞行器的姿态。
24.涵道飞行器可操纵部分分为两类。第1类为油门,该控制量控制螺旋桨转速从而控制推力大小。第2类为气动舵面,该控制量控制力矩从而控制飞行器姿态。
25.飞行器控制方式包括推力控制和力矩控制。
26.推力控制:推力控制直接通过控制油机或电机的油门来调整螺旋桨转速,从而控制飞行器推力的大小,推力方向始终沿着机体z轴方向。
27.力矩控制:该涵道飞行器属于单涵道飞行器,只有一个通过涵道的气流流场,3轴的控制全靠位于流场中的四组气动舵面偏转来完成,其流场受涵道风扇系统的影响在不同风扇转速下有不同的气流偏转,涵道风扇的每个气动舵面都承担3轴的控制力矩的产生任务,整个控制对象交联关系复杂,提供飞行器所需的各种力矩。各种力矩包括俯仰力矩控制、滚转力矩控制、偏航力矩控制以及组合力矩控制。控制舵面三维图,如图2所示,每组气动舵面由三个叶片组成,叶片可同时沿着旋转轴在纵向平面内旋转。
28.一种涵道飞行器控制方法,采用如上述的涵道飞行器控制结构,在水平面内设定x、y轴,第一控制舵面和第三控制舵面的旋转轴方向为y轴,第二控制舵面和第四控制舵面的旋转轴方向为x轴,如图3所示。
29.如图4所示,涵道飞行器俯仰控制力矩控制由第一控制舵面和第三控制舵面同偏生成;当第一控制舵面和第三控制舵面同时绕y轴正偏转时,按右手定则,产生体轴负俯仰力矩;当第一控制舵面和第三控制舵面同时绕y轴负偏转时,按右手定则,产生体轴正俯仰力矩。
30.如图5所示,涵道飞行器滚转控制力矩控制由第二控制舵面和第四控制舵面同偏生成;当第二控制舵面和第四控制舵面同时绕x轴正偏转时,按右手定则,产生体轴负滚转力矩;当第二控制舵面和第四控制舵面同时绕x轴负偏转时,按右手定则,产生体轴正滚转力矩。
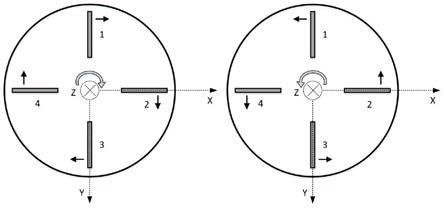
31.如图6所示,涵道飞行器偏航控制力矩控制由第一控制舵面和第三控制舵面差偏与第二控制舵面和第四控制舵面差偏生成,第一控制舵面和第三控制舵面差偏与第二控制舵面和第四控制舵面差偏产生的力矩需一致;当第一控制舵面绕y轴正偏转、第三控制舵面绕y轴负偏转、第二控制舵面绕x轴正偏转、第四控制舵面绕x轴负偏转时,按右手定则,会产生体轴正偏航力矩;当第一控制舵面绕y轴负偏转、第三控制舵面绕y轴正偏转、第二控制舵面绕x轴负偏转、第四控制舵面绕x轴正偏转时,按右手定则,会产生体轴负偏航力矩。
32.涵道飞行器在需要组合力矩时,第一控制舵面、第二控制舵面、第三控制舵面和第四控制舵面所需偏转按照俯仰力矩、滚转力矩和偏航力矩定义的偏转进行叠加后生成。
33.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。