1.本实用新型属于共轴双旋翼直升机领域,具体涉及一种共轴双旋翼直升机上下旋翼独立操纵装置。
背景技术:
2.直升机具有垂直起降和悬停能力,对起降场地的要求较低,能够在非铺装地面或城市高楼楼顶等场合起降,由于其使用的灵活性,直升机在航空器领域具有不可替代的作用。目前世界上的无人直升机主要有单旋翼带尾桨型和共轴双旋翼型无人直升机两类。共轴双旋翼型直升机无需尾桨和尾传动,其结构尺寸比单旋翼带尾桨直升机更为紧凑,共轴双旋翼型无人直升机的双旋翼桨距操纵分为上下旋翼联动操纵和上下旋翼独立操纵两种。
3.俄罗斯的卡50等直升机采用上下旋翼联动操纵方式对共轴双旋翼直升机进行操纵,上旋翼自动倾斜器位于上下旋翼之间,下旋翼自动倾斜器位于下旋翼下方,通过一组布置于下旋翼桨叶之间的拉杆连接上下自动倾斜器,实现两个旋翼的联动操纵。上下旋翼联动操纵的操纵方式自由度较少,但连杆结构复杂,众多杆系串联降低结构可靠度,且上下旋翼的联动杆系以及整套上旋翼操纵系统皆暴露于旋翼流场,直升机飞行时会产生较大阻力。
4.上下旋翼独立操纵可独立控制上旋翼和下旋翼的总距及周期变距,分别由三个舵机与上下自动倾斜器相连,下旋翼的操纵装置可采用常规单旋翼直升机的旋翼轴外操纵装置,因空间限制,上旋翼的操纵装置需采用轴内操纵的方式。目前采用旋翼轴内操纵方式的直升机非常少,如ch7直升机等两片桨叶的跷跷板式旋翼,其通过两根置于轴内的拉杆连接位于旋翼轴底部的自动倾斜器和旋翼轴顶部的换向机构,带动两片桨叶变距。其机械原理局限于桨叶片数为两片的旋翼,且拉杆从旋翼顶部伸出后换向,暴露于旋翼外侧,产生阻力较大。其运动转向机构复杂,需要使用多个拉杆和杆端轴承,会累积操纵误差,降低直升机的控制精度。另外,轴内操纵拉杆从旋翼顶部伸出,占据了旋翼顶部空间,会影响旋翼整流罩或雷达等旋翼顶部设备的布局。
5.因此,设计一种气动阻力小、结构简洁、工作可靠的共轴双旋翼上下旋翼独立操纵系统,尤其是完全包络于旋翼轴内部的上旋翼轴内操纵系统,对解决现有技术存在的上述问题具有重要的工程意义。
技术实现要素:
6.本实用新型的目的在于提供一种共轴双旋翼直升机上下旋翼独立操纵装置。
7.实现本实用新型目的的技术解决方案为:一种共轴双旋翼直升机上下旋翼独立操纵装置,包括上旋翼、下旋翼、下旋翼自动倾斜器和上旋翼自动倾斜器;下旋翼自动倾斜器从旋翼轴外部对下旋翼进行变距操纵,上旋翼自动倾斜器从旋翼轴内部对上旋翼进行操纵,实现对上下两副旋翼的桨距独立操纵。
8.进一步的,所述下旋翼由下旋翼桨叶和下旋翼桨毂中心件组成;下旋翼桨叶安装
于下旋翼桨毂中心件内部,中间由变距轴承和推力轴承连接,可相对转动,实现变距运动;下旋翼变距摇臂位于下旋翼桨毂中心件外侧,其与下旋翼桨叶固连;所述下旋翼自动倾斜器包括下旋翼自动倾斜器不动环、下旋翼自动倾斜器动环、下旋翼自动倾斜器中心球铰;下旋翼舵机一端与机体铰接,一端与下旋翼自动倾斜器不动环铰接;下旋翼防扭臂连接机体和下旋翼自动倾斜器不动环,以保证不动环不随旋翼转动;下旋翼自动倾斜器不动环与下旋翼自动倾斜器动环间由轴承连接,可相互转动;下旋翼自动倾斜器动环中心与下旋翼自动倾斜器中心球铰铰接,绕其转动,下旋翼自动倾斜器中心球铰在下旋翼主轴上沿导轨可上下滑动;下旋翼变距拉杆一端与下旋翼变距摇臂铰接,另一端与下旋翼自动倾斜器动环铰接;下旋翼自动倾斜器的运动通过下旋翼变距拉杆带动下旋翼桨叶实现总距和周期变距操纵。
9.进一步的,下旋翼变距拉杆位于下旋翼桨毂中心件外部。
10.进一步的,下旋翼舵机数量为三个,三个下旋翼舵机同步伸缩实现下旋翼自动倾斜器的总距操纵,三个下旋翼舵机的差动伸缩实现下旋翼自动倾斜器的周期变距操纵。
11.进一步的,所述上旋翼由上旋翼桨叶和上旋翼桨毂中心件组成;上旋翼桨叶安装于上旋翼桨毂中心件内部,中间由变距轴承和推力轴承连接实现变距运动;上旋翼变距摇臂位于上旋翼桨毂中心件内部,其与上旋翼桨叶固连;所述上旋翼自动倾斜器包括上旋翼自动倾斜器动环、上旋翼自动倾斜器不动环、上旋翼自动倾斜器中心球铰;上旋翼变距拉杆位于上旋翼主轴内部,穿过底部支撑轴预留的开口伸至上旋翼主轴下方,与上旋翼自动倾斜器动环连接,上旋翼自动倾斜器动环与上旋翼自动倾斜器不动环间由轴承连接,可相互绕轴承转动而不能相对平动,上旋翼防扭臂连接上旋翼自动倾斜器不动环和机体,保证上旋翼自动倾斜器不动环不随旋翼轴转动;上旋翼舵机连接机体和上旋翼自动倾斜器,通过伸缩带动上旋翼自动倾斜器进行总距和周期变距操纵。
12.进一步的,上旋翼变距拉杆从上旋翼主轴内部伸至上旋翼桨毂中心件内部,上端与上旋翼变距摇臂铰接,上旋翼变距拉杆上下推拉上旋翼变距摇臂,带动上旋翼桨叶在上旋翼桨毂中心件内部进行变距运动。
13.进一步的,底部支撑轴作为上旋翼自动倾斜器中心球铰的支撑,底部支撑轴安装在上旋翼主轴底部外侧,上旋翼自动倾斜器中心球铰在底部支撑轴上滑动实现总距操纵,上旋翼自动倾斜器动环和上旋翼自动倾斜器不动环绕上旋翼自动倾斜器中心球铰转动实现周期变距操纵。
14.进一步的,周期变距操纵时,上旋翼自动倾斜器绕上旋翼自动倾斜器中心球铰转动;总距操纵时,上旋翼自动倾斜器和上旋翼自动倾斜器中心球铰整体沿底部支撑轴上下滑动。
15.与现有技术相比,本实用新型具有以下有益效果:(1)上下旋翼的操纵完全独立,不存在耦合,上下旋翼的操纵不会相互影响;(2)上下旋翼自动倾斜器皆绕中心球铰偏转,相互发生角运动;(3)多根拉杆安装在动环的不同方位角处,例如两片桨旋翼的变距拉杆相隔180
°
布置,三片桨旋翼拉杆相隔120
°
布置,四片桨旋翼拉杆相隔90
°
布置,以此类推,可实现两片或多片桨叶旋翼的变距操纵,适用范围广;(4)上旋翼的操纵杆系完全包络在旋翼轴和桨毂内部,不暴露于旋翼流场,可降低旋翼阻力;(5)舵机和自动倾斜器支撑轴位于旋翼轴外侧,对旋翼轴尺寸要求较低,结构紧凑。
附图说明
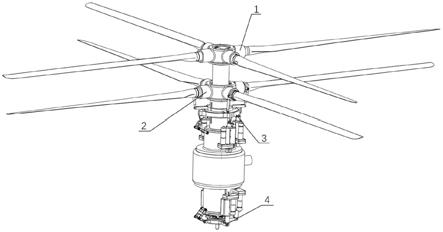
16.图1是本实用新型的整体示意图。
17.图2是本实用新型的下旋翼操纵机构示意图。
18.图3是本实用新型的上旋翼操纵机构示意图。
19.图4是本实用新型的上旋翼操纵机构底部剖视图。
20.图5是本实用新型的上旋翼操纵机构顶部示意图。
21.图中标号:1、上旋翼,2、下旋翼,3、下旋翼自动倾斜器,4、上旋翼自动倾斜器,5、下旋翼桨叶,6、下旋翼变距摇臂,7、下旋翼变距拉杆,8、下旋翼舵机,9、下旋翼主轴,10、下旋翼防扭臂,11、下旋翼自动倾斜器不动环,12、下旋翼自动倾斜器动环,13、下旋翼自动倾斜器中心球铰,14、下旋翼桨毂中心件,15、上旋翼桨叶,16、上旋翼桨毂中心件,17、上旋翼变距摇臂,18、上旋翼变距拉杆,19、底部支撑轴,20、上旋翼防扭臂,21、上旋翼自动倾斜器动环,22、上旋翼自动倾斜器不动环,23、上旋翼自动倾斜器中心球铰,24、上旋翼舵机,25、上旋翼主轴。
具体实施方式
22.本实用新型提供一种多片桨旋翼的共轴双旋翼直升机上下旋翼独立操纵装置,包括上旋翼1、下旋翼2、下旋翼自动倾斜器3、上旋翼自动倾斜器4、下旋翼主轴9、上旋翼主轴25、上旋翼底部支撑轴19;
23.所述下旋翼自动倾斜器3包括下旋翼自动倾斜器不动环11、下旋翼自动倾斜器动环12、下旋翼自动倾斜器中心球铰13;上旋翼自动倾斜器4包括上旋翼自动倾斜器动环21、上旋翼自动倾斜器不动环22、上旋翼自动倾斜器中心球铰23;
24.下旋翼变距摇臂6和下旋翼变距拉杆7位于下旋翼桨毂中心件14外部,上旋翼变距摇臂17和上旋翼变距拉杆18位于上旋翼桨毂中心件16及上旋翼主轴内部。
25.所述下旋翼自动倾斜器不动环11与下旋翼舵机8相连,下旋翼自动倾斜器中心球铰13沿下旋翼主轴9上下运动,下旋翼舵机8带动下旋翼自动倾斜器3上下移动或绕中心球铰倾斜,实现总距与周期变距操纵。下旋翼变距摇臂6位于桨毂外侧,通过一组短变距拉杆连接下旋翼自动倾斜器的动环,由变距拉杆带动变距摇臂绕变距轴旋转实现桨叶变距。
26.上旋翼底部支撑轴19安装在上旋翼主轴25底部,作为上旋翼自动倾斜器中心球铰23的支撑,中心球铰23沿底部支撑轴19的导轨上下滑动实现总距操纵;上旋翼自动倾斜器动环和上旋翼自动倾斜器不动环绕上旋翼自动倾斜器中心球铰转动实现周期变距操纵。底部支撑轴端盖预留孔隙,供上旋翼长变距拉杆经其中上下自由运动。上旋翼底部支撑轴19位于上旋翼主轴外部,不占用上旋翼主轴内空间,上旋翼主轴内部布置几根长变距拉杆,旋翼轴尺寸较为紧凑。
27.上旋翼由上旋翼桨叶15、上旋翼桨毂中心件16等组成,上旋翼桨叶15插在上旋翼桨毂中心件16内部,之间由一组轴承连接,桨叶与桨毂中心件间仅可绕轴承转动,从而实现变距操纵,桨叶根部安装有变距摇臂,变距摇臂和上旋翼长变距拉杆相连,由变距拉杆的上下运动带动上旋翼桨叶进行变距。
28.该机构可实现对共轴双旋翼直升机的上下旋翼进行独立操纵,上下旋翼自动倾斜器都设置由中心球铰,可应用于不同桨叶片数的旋翼,通用性好;舵机布置于旋翼轴外,对
旋翼轴尺寸要求低,尺寸更紧凑;上旋翼的旋翼轴内操纵杆系完全布置于旋翼轴内,不影响旋翼流场,结构简洁紧凑,且可有效降低旋翼系统阻力。
29.下面结合本实用新型的附图对其具体实施方式作进一步详细描述:
30.实施例
31.参照附图1~5对本实用新型作进一步说明。
32.本实用新型整体结构如图1所示,包括上旋翼1、下旋翼2、下旋翼自动倾斜器3和上旋翼自动倾斜器4。下旋翼自动倾斜器3从旋翼轴外部对下旋翼2进行变距操纵,上旋翼自动倾斜器4从旋翼轴内部对上旋翼1进行操纵,实现对上下两副旋翼的桨距独立操纵。
33.如图2所示,下旋翼2由下旋翼桨叶5和下旋翼桨毂中心件14等组成。下旋翼桨叶5安装于下旋翼桨毂中心件15内部,中间由变距轴承和推力轴承连接,可相对转动,实现变距运动。下旋翼变距摇臂6位于下旋翼桨毂中心件15外侧,其与下旋翼桨叶5固连。三个下旋翼舵机8一端与机体铰接,一端与下旋翼自动倾斜器不动环11铰接,三个下旋翼舵机8同步伸缩实现下旋翼自动倾斜器3的总距操纵,三个下旋翼舵机8的差动伸缩实现下旋翼自动倾斜器3的周期变距操纵。下旋翼防扭臂10连接机体和下旋翼自动倾斜器不动环11,以保证不动环不随旋翼转动。下旋翼自动倾斜器不动环11与下旋翼自动倾斜器动环12间由轴承连接,可相互转动。下旋翼自动倾斜器动环12中心与下旋翼自动倾斜器中心球铰13铰接,绕其转动,下旋翼自动倾斜器中心球铰13在下旋翼主轴9上沿导轨可上下滑动。下旋翼变距拉杆7一端与下旋翼变距摇臂6铰接,一端与下旋翼自动倾斜器动环12铰接。下旋翼自动倾斜器3的运动通过下旋翼变距拉杆7带动下旋翼桨叶5实现总距和周期变距操纵。
34.如图3所示,上旋翼1由上旋翼桨叶15和上旋翼桨毂中心件16等组成。上旋翼桨叶15安装于上旋翼桨毂中心件16内部,中间由变距轴承和推力轴承连接实现变距运动。上旋翼变距摇臂17位于上旋翼桨毂中心件16内部,其与上旋翼桨叶15固连。
35.如图4所示,上旋翼变距拉杆18位于上旋翼主轴25内部,穿过底部支撑轴19预留的开口伸至上旋翼主轴25下方,与上旋翼自动倾斜器动环21连接,上旋翼自动倾斜器动环21与上旋翼自动倾斜器不动环22间由轴承连接,可相互绕轴承转动而不能相对平动,上旋翼防扭臂20连接上旋翼自动倾斜器不动环22和机体,保证上旋翼自动倾斜器不动环22不随旋翼轴转动。上旋翼舵机24连接机体和上旋翼自动倾斜器4,通过伸缩带动上旋翼自动倾斜器4进行总距和周期变距操纵。周期变距操纵时,上旋翼自动倾斜器4绕上旋翼自动倾斜器中心球铰23转动。总距操纵时,上旋翼自动倾斜器4和上旋翼自动倾斜器中心球铰23整体沿底部支撑轴19上下滑动。设计有带转臂带动上旋翼自动倾斜器动环21随上旋翼主轴25一起旋转,从而保证上旋翼变距拉杆18工作过程中不会发生扭曲,至承受其轴向的拉压力。
36.如图5所示,上旋翼变距拉杆18从上旋翼主轴25内部伸至上旋翼桨毂中心件16内部,上端与上旋翼变距摇臂17铰接,上旋翼变距拉杆18上下推拉上旋翼变距摇臂17,带动上旋翼桨叶15在上旋翼桨毂中心件16内部进行变距运动。
37.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。