1.本实用新型涉及倾转旋翼无人机技术领域,具体涉及一种适用于倾转旋翼无人机的倾转机构。
背景技术:
2.倾转旋翼无人机是一种兼具固定翼及旋翼优点集一体的新型飞行器,可垂直起降和高航时巡航。倾转旋翼无人机的旋翼模式下,倾转机构与机翼弦线垂直,绕倾转轴竖直立起;巡航模式下,倾转机构与机翼弦线平行,旋翼转动到水平位置。倾转机构的工作要求是在倾转装置的作用下完成固定翼和旋翼模式之间的动态转换。
3.目前有关于倾转机构的作用方法如下:
4.(1)采用舵机直接带动倾转电机座作用,完成转动角度0
°
~90
°
的转换;
5.(2)采用直线作动方式,利用液压系统驱动丝杠伸缩以实现直线型驱动器的顶推作用,完成倾转无人机的固定翼和旋翼模式的转换;
6.(3)采用蜗轮蜗杆连接,蜗杆与驱动轴驱动连接,涡轮与蜗杆传动配合,涡轮转动连接在转轴上,以此构成倾转机构。
7.但是,上述倾转机构存在装置传动复杂、占用空间大的问题,进而影响无人机的整体体积以及重量。
技术实现要素:
8.针对现有技术存在的不足,本实用新型的目的在于提供一种适用于倾转旋翼无人机的倾转机构,将吊舱置于倾转装置内,避免了倾转装置暴露在空气中影响倾转旋翼飞行器的气动外形,同时质量轻,结构紧凑。
9.为了实现上述目的,本实用新型提供如下技术方案:
10.一种适用于倾转旋翼无人机的倾转机构,包括倾转电机座,所述倾转电机座转动连接有吊舱,所述吊舱内设置有用于带动所述倾转电机座倾转的倾转驱动机构。
11.在本实用新型中,进一步的,所述倾转驱动机构包括舵机,所述舵机的输出端固定连接有舵机齿轮盘,所述舵机齿轮盘两侧均安装有连杆,所述连杆固定在所述倾转电机座上。
12.在本实用新型中,进一步的,所述倾转电机座包括冂型的电机座本体以及位于电机座本体中间的连接板,所述连接板上开设有连杆安装孔,所述连杆安装孔用于安装所述连杆。
13.在本实用新型中,进一步的,所述吊舱通过转轴与所述倾转电机座固定连接。
14.在本实用新型中,进一步的,所述电机座本体、连接板上均开设有同轴设置的吊舱安装孔,所述吊舱安装孔用于安装所述转轴。
15.在本实用新型中,进一步的,所述电机座本体上侧开设有若干电机安装孔,所述电机安装孔用于安装驱动电机。
16.在本实用新型中,进一步的,所述吊舱包括吊舱本体以及与所述吊舱本体一体成型的安装部,所述安装部上开设有安装口,所述安装口延伸至安装部的侧端面,所述连接板设置在所述安装口内。
17.在本实用新型中,优选的,所述安装部为圆台结构。
18.在本实用新型中,优选的,位于所述齿轮盘两侧的连杆平行设置。
19.在本实用新型中,优选的,所述吊舱为碳纤维与凯夫拉混纺材质。
20.与现有技术相比,本实用新型的有益效果是:
21.本实用新型的装置采用吊舱设计,将倾转驱动机构安置在吊舱内部,改善了倾转旋翼无人机的气动外形,且使结构紧凑,减小了占用空间。通过舵机控制舵机齿轮盘的转动,使连杆平行推动倾转电机座完成固定翼到旋翼的转换,在保证了传动精度的同时使传动关系简单,便于实现倾转过程。
附图说明
22.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
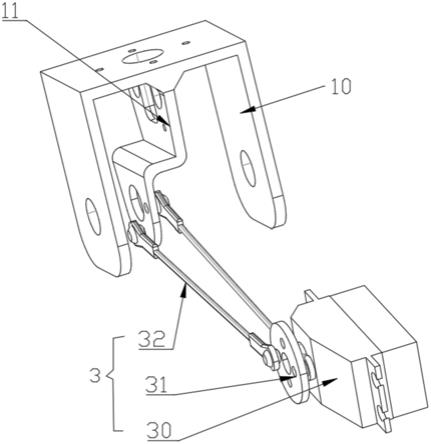
23.图1是本实用新型的一种适用于倾转旋翼无人机的倾转机构的整体示意图;
24.图2是本实用新型的一种适用于倾转旋翼无人机的倾转机构中倾转驱动机构的结构示意图;
25.图3是本实用新型的一种适用于倾转旋翼无人机的倾转机构中的倾转电机座的结构示意图;
26.图4是本实用新型的一种适用于倾转旋翼无人机的倾转机构中的吊舱的结构示意图。
27.图中:1、倾转电机座;10、电机座本体;11、连接板;12、电机安装孔;13、连杆安装孔;14、吊舱连接孔;2、吊舱;20、吊舱本体;21、安装部;22、安装口;3、倾转驱动机构;30、舵机;31、舵机齿轮盘;32、连杆;
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
30.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括
一个或多个相关的所列项目的任意的和所有的组合。
31.请同时参见图1至图2,本实用新型一较佳实施方式提供一种适用于倾转旋翼无人机的倾转机构,包括倾转电机座1,所述倾转电机座1转动连接有吊舱2,所述吊舱2内设置有用于带动所述倾转电机座1倾转的倾转驱动机构3。
32.具体的,在本实施例中,采用吊舱2设计,将吊舱2置于机翼下方,将倾转驱动机构3安置在吊舱2内部,避免了倾转驱动机构3暴露在空气中影响倾转旋翼飞行器的气动外形,且使结构紧凑,减小了占用空间。通过传动机构控制倾转电机座1进行转动,完成固定翼到旋翼的转换,传动关系简单,便于实现倾转过程控制。
33.在本实用新型中,优选的,如图4所示,吊舱2包括吊舱本体20以及与所述吊舱本体20一体成型的安装部21,吊舱本体20为圆柱形,以便于安装长度较长的传动机构的安装。安装部21为圆台结构,直径逐渐向远离吊舱本体20的一侧缩小,由于安装部21的一端是外露的,因此该结构减少了与外接的接触面积,在保证安装环境的前提下,实现对吊舱本体20内部的倾转驱动机构3更好的保护。此外,吊舱2为碳纤维与凯夫拉混纺材质,材质为碳纤维与凯夫拉混纺,结构重量轻,强度高,给飞行器整体减轻了重量。
34.在本实用新型中,进一步的,如图2所示,所述倾转驱动机构3包括舵机30,所述舵机30的输出端固定连接有舵机齿轮盘31,所述舵机齿轮盘31两侧均固定安装有连杆32,且两侧连杆32平行设置,保证移动的同步以及稳定性,所述连杆32固定在所述倾转电机座1上。
35.如图3所示,所述倾转电机座1包括冂型的电机座本体10以及位于电机座本体10中间的连接板11,连接板11为折弯板,便于吊舱2的安装且为吊舱2提供一定的支撑。所述连接板11上开设有连杆安装孔13,所述连杆安装孔13用于安装所述连杆32。
36.具体的,在进行完成固定翼和旋翼模式之间的动态倾转控制时,通过舵机30带动舵机齿轮盘31的转动,使连杆32平行推动倾转电机座1完成固定翼到旋翼的转换,保证传动精度的同时传动关系简单,便于实现倾转过程控制。
37.具体的,倾转电机座1本体为冂型,顶面开设有若干设有若干电机安装孔12,电机安装孔12用于安装驱动电机,驱动电机用于驱动螺旋桨产生动力,倾转驱动机构3为驱动电机提供倾斜角度,在续航过程中,飞行器可以利用螺旋桨的倾斜角度获得适合的作用力,保证飞行器更加精准受力。
38.此外,所述安装部21上开设有安装口22,所述安装口22延伸至安装部21的侧端面,所述连接板11设置在所述安装口22内,如此,使整体结构连接更加紧凑,减少占空空间和空气阻力。
39.在本实用新型中,所述吊舱2通过转轴与所述倾转电机座1固定连接,电机座本体10、连接板11上均开设有同轴设置的吊舱安装孔14,所述吊舱安装孔14用于安装转轴,在吊舱安装孔14内均固定连接有轴承,保证倾转电机座1转动的流畅性。
40.在本实用新型中,优选的,位于所述齿轮盘两侧的连杆32平行设置。
41.在本实施方式中,工作原理:
42.首先,在遥控器上设置一个控制舵机30的通道开关,将舵机30与飞控电连接,通过飞控给舵机30通电,并使舵机30处于一个初始位置;
43.吊舱2采用螺纹连接固定在机翼下方,吊舱2内部设置有舵机30,舵机齿轮盘31安
装在舵机30上,舵机齿轮盘31两侧各设置有一根连杆32,连杆32另一端固定在倾转电机座1的连杆安装孔13上,安装时要保证两连杆32平行。倾转电机座1通过吊舱安装孔14与吊舱2上的转轴固定,转轴与吊舱安装孔14间设置有轴承。舵机30转动带动舵机齿轮盘31作用,通过平行的两连杆32带动倾转电机座1进行倾转,以使倾转电机座1完成固定翼到旋翼的转换。
44.上述说明是针对本实用新型较佳可行实施例的详细说明,但实施例并非用以限定本实用新型的专利申请范围,凡本实用新型所提示的技术精神下所完成的同等变化或修饰变更,均应属于本实用新型所涵盖专利范围。