1.本发明涉及无人机设备领域,具体是一种察打一体无人机。
背景技术:
2.无人驾驶飞机,俗称:无人飞机、无人机、无人航空载具、无人作战飞机以及蜂型机;广义上为不需要驾驶员登机驾驶的各式遥控飞行器,一般特指军方的无人侦察飞机。
3.察打无人机是在侦查无人机的基础上改进而来,察打无人机因同时具备侦查与打击等多项功能,因此使用范围更为宽泛以及应用频次更高;而察打无人机高频次的应用也对无人机升降时的起落架提出了更高的要求。
4.针对上述背景技术中的问题,本发明旨在提供一种察打一体无人机。
技术实现要素:
5.本发明的目的在于提供一种察打一体无人机,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种察打一体无人机,所述察打一体无人机包括:
8.无人机本体,所述无人机本体上端通过螺栓安装固定有主翼,无人机本体后端设有副翼,副翼的数量为两个,两个副翼分别通过第二连杆与第一连杆配合作用与无人机本体实现安装固定;两个副翼与主翼配合作用形成三角形截面;
9.所述无人机本体末端安装有桨叶,桨叶的数量为三个,相邻两个桨叶之间形成的夹角为120
°
;所述无人机本体内部设有电机以及电池,电池的数量为两组,两颗电池为一组;
10.所述无人机本体前端设有云台相机与空速管,所述无人机本体上端还安装固定有信号杆;
11.所述无人机本体前侧下端安装有支撑组件,无人机本体后侧下端设有起落组件。
12.作为本发明进一步的方案:所述无人机本体还匹配设有图传系统与无线传输系统。
13.作为本发明进一步的方案:所述支撑组件包括套管、套杆以及轴封,所述套管上端与无人机本体连接,套管下端活动安装在套杆上,套杆下端设有轴封,套杆在套管与轴封之间的部分上安装有压缩弹簧;所述轴封内部活动安装有转轴,转轴两侧设有滚轮。
14.作为本发明进一步的方案:所述起落组件包括安装板、弯管以及弯杆,安装板上端通过螺栓安装固定在无人机本体下端,安装板下端左右两侧设有弯管,弯管下端活动安装有弯杆,弯杆下端设有安装架,安装架一端安装有行轮;弯杆在弯管与安装架之间的部分上设有缓冲弹簧。
15.与现有技术相比,本发明的有益效果是:
16.所述的察打一体无人机通过设置的两个副翼与主翼配合作用形成三角形截面;设
置的主翼用于提高所述察打一体无人机起飞时所需的升力,而安装的副翼则用于帮助平衡所述察打一体无人机飞行时的稳定性以及便于操控所述察打一体无人机进行方向偏转;
17.另外,设置的云台相机支持广角变焦实时切换,支持目标智能跟随,可识别到视频目标实时跟踪;匹配设有图传系统与无线传输系统,该图传系统支持一体无线传输系统能将无人机的视频和飞控数据传输给地面控制站,该无线传输系统具有多种视频输入输出接口,集成度高、传输延时低,能够满足无人机多样化挂载需求;
18.更重要的是,设置的起落组件与支撑组件配合作用在整个无人机本体下端形成三角形,三角形具备稳定性,因此在所述察打一体无人机放置以及起飞滑行时均具备较好的稳定性;而且起落组件与支撑组件自身均具备较好的缓冲减震效果。
附图说明
19.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例。
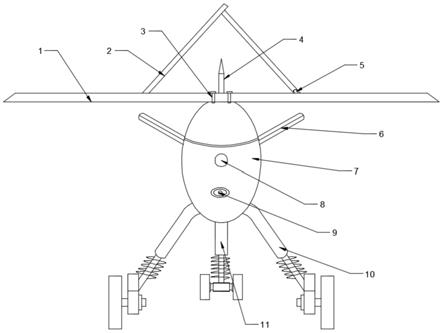
20.图1为本发明实施例的一种察打一体无人机的正视图。
21.图2为本发明实施例的一种察打一体无人机的结构示意图。
22.图3为本发明实施例的一种察打一体无人机的支撑组件结构示意图。
23.图4为本发明实施例的一种察打一体无人机的起落组件结构示意图。
24.图中:1
‑
主翼、2
‑
副翼、3
‑
螺栓、4
‑
信号杆、5
‑
第一连杆、6
‑
桨叶、7
‑
无人机本体、8
‑
空速管、9
‑
云台相机、10
‑
起落组件、11
‑
支撑组件、12
‑
第二连杆、13
‑
套管、14
‑
压缩弹簧、15
‑
套杆、16
‑
滚轮、17
‑
转轴、18
‑
轴封、19
‑
安装板、20
‑
弯管、21
‑
缓冲弹簧、22
‑
弯杆、23
‑
安装架、24
‑
行轮。
具体实施方式
25.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
26.实施例
27.请参阅图1和图2,本发明实施例中提供的一种察打一体无人机,所述察打一体无人机包括:
28.无人机本体7,所述无人机本体7上端通过螺栓3安装固定有主翼1,无人机本体7后端设有副翼2,副翼2的数量为两个,两个副翼2分别通过第二连杆12与第一连杆5配合作用与无人机本体7实现安装固定;两个副翼2与主翼1配合作用形成三角形截面;设置的主翼1用于提高所述察打一体无人机起飞时所需的升力,而安装的副翼2则用于帮助平衡所述察打一体无人机飞行时的稳定性以及便于操控所述察打一体无人机进行方向偏转;
29.所述无人机本体7末端安装有桨叶6,桨叶6的数量为三个,相邻两个桨叶6之间形成的夹角为120
°
;所述无人机本体7内部设有电机以及电池,电池的数量为两组,两颗电池为一组,电池最长续航时间为55分钟,自带加热功能;电池为电机的运转提供电能,电机运转则提供桨叶6旋转时所需的动能;
30.所述无人机本体7前端设有云台相机9与空速管8,云台相机9支持广角变焦实时切换,支持目标智能跟随;云台相机9为2000w像素30倍混合光学变焦镜头、1200w广角镜头、高清红外补光镜头以及激光测距雷达多合一云台,能够支持点测温,区域测温;支持指点变焦,支持超清矩阵拍照;另外,云台相机9可以俯仰:+30
°
至-120
°
;平移:
±
360
°
,横滚:
‑
40
°
至+40
°
;最大控制转速俯仰:120
°
/s,平移:180
°
/s;可识别到视频目标实时跟踪,可将视频图像存储至容量≤256g的tf卡;设置的hdmi与网口输出一键切换,sbus信号控制与串口控制一键切换;所述无人机本体7上端安装固定有信号杆4,信号杆4用于无线信号的收发,便于操作者对所述察打一体无人机进行远程遥控控制;而安装的空速管8则用于实时检测所述察打一体无人机飞行时的时速;
31.所述无人机本体7前侧下端安装有支撑组件11,无人机本体7后侧下端设有起落组件10,设置的支撑组件11与起落组件10配合作用在无人机本体7下端呈三角形分布,用于对所述察打一体无人机起飞降落时起到支撑与减震。
32.进一步地,所述无人机本体7还匹配设有图传系统与无线传输系统,该图传系统支持一体无线传输系统能将无人机的视频和飞控数据传输给地面控制站,同时支持将地面站和遥控器的控制信息上发给无人机,能满足无人机、机器人等应用场景中视频和控制指令同时传输的需求;该无线传输系统具有多种视频输入输出接口,集成度高、传输延时低,能够满足无人机多样化挂载需求;另外,该图传系统工作频段用户可自主配置为800m有效范围7~15km。
33.请参阅图3,进一步地,所述支撑组件11包括套管13、套杆15以及轴封18,所述套管13上端与无人机本体7连接,套管13下端活动安装在套杆15上,套杆15下端设有轴封18,套杆15在套管13与轴封18之间的部分上安装有压缩弹簧14;所述轴封18内部活动安装有转轴17,转轴17两侧设有滚轮16;
34.当所述察打一体无人机通过转动的桨叶6提供飞行时所需的动力时,设置的滚轮16在地面上进行滚动位移,而设置的套管13则活动安装在套杆15上,套杆15上设置的压缩弹簧14形变产生弹力反作用给套管13,用于对所述察打一体无人机起飞以及降落时起到缓冲减震。
35.请参阅图4,进一步地,所述起落组件10包括安装板19、弯管20以及弯杆22,安装板19上端通过螺栓安装固定在无人机本体7下端,安装板19下端左右两侧设有弯管20,弯管20下端活动安装有弯杆22,弯杆22下端设有安装架23,安装架23一端安装有行轮24;弯杆22在弯管20与安装架23之间的部分上设有缓冲弹簧21;
36.当所述察打一体无人机通过设置的起落组件10进行起飞降落时,在起飞时,设置的行轮24在地面上进行滚动位移;在降落时,设置的弯管20下端活动安装在弯杆22上,而缓冲弹簧21形变产生弹力使整个起落组件10具备缓冲减震效果;另外,设置的起落组件10与支撑组件11配合作用在整个无人机本体7下端形成三角形,三角形具备稳定性,因此在所述察打一体无人机放置以及起飞滑行时具备较好的稳定性。
37.在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具
体含义。
38.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。