1.本实用新型涉及无人机检测技术领域,尤其涉及一种防碰撞无人机检测装置。
背景技术:
2.幕墙作为建筑的外围护墙,需要对其是否出现破损、裂缝和空洞等潜在风险以及幕墙结构胶的脱落、破损和松动等可能造成幕墙坠落的潜在风险进行检测,简称为幕墙检测。幕墙检测需要借助检测设备,一般采用人工手持检测设备,或者将检测设备搭载于辅助设备上,随着无人机和机器人技术的快速发展,通常将检测设备搭载于无人机或爬壁机器人上。
3.现有技术中采用的无人机均为多旋翼式,以四旋翼和六旋翼最为常见,但对于幕墙检测而言,难以实现超近距离飞行,在近距离(例如小于一米)飞行检测时易发生碰撞坠机;另一类搭载设备爬壁机器人,其能够贴在幕墙表面进行接触式测量和超近距拍照,但是其移动速度慢,越障能力有限,从而工作效率低下。
技术实现要素:
4.本实用新型的目的在于提出一种防碰撞型无人机检测装置,该防碰撞型无人机具有良好的防碰撞和防坠能力,可紧贴物体表面飞行,近距离采集相关数据,且工作效率高。
5.为达此目的,本实用新型采用以下技术方案:
6.一种防碰撞型无人机检测装置,包括多旋翼无人机、防碰撞网架和万向支架,所述多旋翼无人机连接在所述万向支架上,所述防碰撞网架连接在所述万向支架上,且所述多旋翼无人机位于所述防碰撞网架的内部。
7.可选地,所述防碰撞网架呈足球烯结构,具有六十个顶点、三十二个面、十二个正五边形和二十个正六边形。
8.可选地,所述万向支架包括第一杆件和环形支架,所述第一杆件绕水平轴转动连接在所述多旋翼无人机上,所述环形支架绕竖直轴转动连接在所述第一杆件上。
9.可选地,所述多旋翼无人机包括多个旋翼和机本体,多个所述旋翼均连接在所述机本体的下方,多个所述旋翼呈均匀间隔分布设置。
10.可选地,所述旋翼通过第二杆件连接在所述机本体上,所述第二杆件内设有用于放置电线的容纳腔。
11.可选地,所述防碰撞网架为碳纤维网架。
12.可选地,所述多旋翼无人机的重心与所述防碰撞网架的球心重合设置。
13.可选地,所述多旋翼无人机还包括双目相机,所述双目相机用于拍摄待检测件的光学与热红外照片。
14.可选地,所述多旋翼无人机还包括电源、飞行控制处理器和传感器,所述电源分别与所述飞行控制处理器和所述传感器电连接,所述传感器用于检测所述多旋翼无人机是否处于平衡,并将信息传递至所述飞行控制处理器中,从而控制所述多旋翼无人机的运动方
向。
15.可选地,所述多旋翼无人机为四旋翼无人机。
16.本实用新型相对于现有技术的有益效果:将多旋翼无人机通过万向支架设置在防碰撞网架的内部,当多旋翼无人机检测幕墙并处于较近距离时,防撞网能够有效地保护多旋翼无人机,可有效避免无人机因碰撞和坠落而导致的损坏,同时多旋翼无人机能够自由运动,无需像爬壁机器人贴紧幕墙移动,因此,本实施例的防碰撞型无人机检测装置不仅解决了无法近距离检测幕墙的缺陷,实现近距离检测幕墙的状态,例如幕墙是否出现破损、裂缝和空洞以及幕墙结构胶是否脱落、破损和松动等;另外还具有灵活行动,相对传统的爬壁机器人而言无越过障碍,检测效率较高的优点。综上可知,防碰撞无人机检测装置具有防碰撞和防坠能力好,工作效率高和适用性广的优点。
附图说明
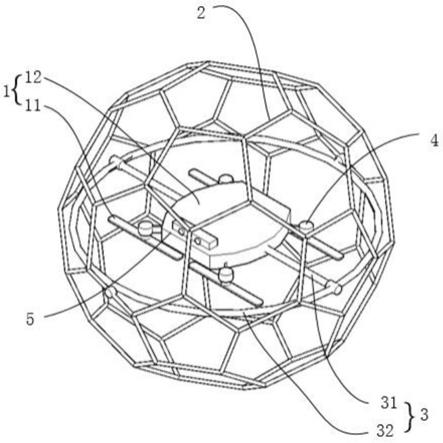
17.图1是本实用新型具体实施方式提供的防碰撞型无人机检测装置的结构示意图;
18.图2是本实用新型具体实施方式提供的防碰撞网架的结构示意图;
19.图3是本实用新型具体实施方式提供的多旋翼无人机连接在万向支架上的结构示意图。
20.附图标记:
[0021]1‑
多旋翼无人机,11
‑
旋翼,12
‑
机本体,2
‑
防碰撞网架,3
‑
万向支架,31
‑
第一杆件,32
‑
环形支架,4
‑
第二杆件,5
‑
双目相机。
具体实施方式
[0022]
为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
[0023]
下面参考图1和图3描述本实用新型实施例的防碰撞型无人机检测装置的具体结构。
[0024]
如图1和2所示,本实施例提供了一种防碰撞型无人机检测装置,包括多旋翼无人机1、防碰撞网架2和万向支架3,多旋翼无人机1连接在万向支架3上,防碰撞网架2连接在万向支架3上,且多旋翼无人机1位于防碰撞网架2的内部。
[0025]
需要说明的是,将多旋翼无人机1通过万向支架3设置在防碰撞网架2的内部,即将图2的多旋翼无人机1放置在图1所述的防碰撞网架2内,当多旋翼无人机1检测幕墙并处于较近距离时,防碰撞网架2能够有效地保护多旋翼无人机1,避免了无人机碰撞和坠落,同时多旋翼无人机1能够自由运动,无需像爬壁机器人贴紧幕墙移动,因此,本实施例的防碰撞型无人机检测装置不仅解决了无法近距离检测幕墙的缺陷,实现近距离检测幕墙的状态,例如幕墙是否出现破损、裂缝和空洞以及幕墙结构胶是否脱落、破损和松动等;另外还具有灵活行动,无越过障碍,检测效率较高的优点,以及多旋翼无人机1无需再内置避障系统,例如视觉避障和超声波避障,大大降低了成本。综上可知,防碰撞型无人机检测装置具有防撞和防坠能力好,可紧贴物体表面飞行,近距离采集相关数据,工作效率高,成本低和适用性广的优点。
[0026]
可选地,如图1和3所示,多旋翼无人机1还包括双目相机5,双目相机5用于拍摄待
检测件的光学与热红外照片。可以理解的是,由于双目相机5可对待检测件幕墙进行光学和热红外拍照,因此,多旋翼无人机1在幕墙近距离拍照时,能够观察幕墙的细部信息,例如幕墙的破损、裂纹和空鼓等损伤状况,以及结构胶的老化、劣化和失效等状况,再将信息通过传感器传递至飞行控制处理器中。
[0027]
具体地,双目相机5位于多旋翼无人机1的顶部靠近边缘位置,双目相机5的摄像头朝向的方向为多旋翼无人机1的运动的正前方。
[0028]
可选地,多旋翼无人机1还包括电源、飞行控制处理器和传感器,电源分别与飞行控制处理器和传感器电连接,传感器用于检测多旋翼无人机1是否处于平衡,并将信息传递至飞行控制处理器中,从而控制多旋翼无人机1的运动方向。
[0029]
可以理解的是,对多旋翼无人机1的电源进行连通,传感器检测到多旋翼无人机1处于平衡状态,并将该信息传递至飞机控制处理器中,飞机控制处理器能够控制多旋翼无人机1上升、下降、前进、后退、左行、右行或旋转等操作,具有灵活行动的优点。另外,由于还设置了防碰撞网架2,多旋翼无人机1能够贴近甚至紧挨幕墙飞行,并通过传感器采集所需的数据。
[0030]
可选地,如图1和2所示,防碰撞网架2呈足球烯结构,具有六十个顶点、三十二个面、十二个正五边形和二十个正六边形。
[0031]
需要说明的是,足球烯结构即碳60分子结构,类似于空心的球形,将防碰撞网架2设置为碳60分子结构,其稳定性能优良。当防碰撞网架2发生碰撞时,防碰撞网架2能够有效地将撞击力分散传递,避免发生应力集中,既提高了防碰撞网架2自身的使用寿命,同时更重要地保护了多旋翼无人机1免受损伤。另外,防碰撞网架2包括多个正五边形和多个正六边形,正五边形和正六边形围设的开口较大,对双目相机5的视域遮挡较小,也便于电源的更换。
[0032]
可选地,如图1和3所示,万向支架3包括第一杆件31和环形支架32,第一杆件31绕水平轴转动连接在多旋翼无人机1上,环形支架32绕竖直轴转动连接在第一杆件31上。
[0033]
需要说明的是,万向支架3由第一杆件31和环形支架32组成,由于第一杆件31绕水平轴转动连接在多旋翼无人机1上,因此多旋翼无人机1能够绕水平轴转动360
°
,可借助转动机构便于旋转,由于环形支架32绕竖直轴转动连接在第一杆件31上,因此,第一杆件31能够绕竖直轴转动360
°
,进而多旋翼无人机1也能够绕竖直轴转动360
°
,实现了多旋翼无人机1在三维空间自由旋转,灵活性极强。
[0034]
具体地,第一杆件31选用碳纤维材质件,环形支架32也选用碳纤维材质件,轻量化程度较高,即质量轻,强度高。
[0035]
可选地,如图1和3所示,多旋翼无人机1包括多个旋翼11和机本体12,多个旋翼11均连接在机本体12的下方,多个旋翼11呈均匀间隔分布设置。需要说明的是,多个旋翼11呈均匀间隔分布在机本体12的下方,有利于受力平衡,平稳性能优良。
[0036]
可选地,如图1和3所示,旋翼11通过第二杆件4连接在机本体12上,第二杆件4内设有用于放置电线的容纳腔。可以理解的是,旋翼11通过第二杆件4连接在多旋翼无人机1的机本体12上,提高了连接强度,并且第二杆件4便于放置电连接所需的电线。
[0037]
可选地,防碰撞网架2为碳纤维网架。因此,防碰撞网架2具有强度高、重量轻的优点,轻量化程度高。当然,在本实用新型的其他实施例中,防碰撞网架2不限于上述此种,可
进行其他选择,此处不做具体限制,仅列举优选方式。
[0038]
可选地,多旋翼无人机1的重心与防碰撞网架2的球心重合设置。因此,有利于外围的防碰撞网架2的自由活动,稳定性和可靠性良好。
[0039]
可选地,多旋翼无人机1为四旋翼无人机。需要说明的是,本实用新型的多旋翼无人机1多采用四旋翼无人机,其具有良好的飞行效果,并且便于放置在防碰撞网架2内,避免碰撞到防碰撞网架2的内壁上,能够适用体积较小的防碰撞网架2,灵活性能较好。当然,在本实用新型的其他实施例中,多旋翼无人机1可根据实际情况需要,进行其他数量的旋翼无人机,例如六旋翼无人机等,此处不做具体限制。
[0040]
补充说明一下,本实用新型的防碰撞型无人机检测装置除了能够用于幕墙检测,还能够用于桥梁检测、地铁隧道巡检和低下综合管廊巡检等情形中。
[0041]
在本说明书的描述中,参考术语“有些实施例”、“其他实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0042]
此外,需要理解的是,术语“上”、“下”、“内”、“外”、“竖直”、“水平”等指示的方位或者位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0043]
在本实用新型中,除非另有明确的规定和限定,“相连”、“连接”、“安装”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述属于在本实用新型中的具体含义。
[0044]
此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征,用于区别描述特征,无顺序之分,无轻重之分。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0045]
以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。