1.本发明涉及飞行器技术领域,特别是一种飞行器及控制方法。
背景技术:
2.目前通过旋翼驱动的单人飞行器,为了在空中能够灵活飞行,通常是采用设于载体两侧的旋翼进行驱动,通过控制系统改变两个旋翼的总距和周期螺距的方式,使用斜盘机构来控制飞行器在空中的飞行姿态,进而实现飞行器在空中变换移动方向以及改变速度状态,由于斜盘机构的设计复杂,对参数控制的要求较高,加大了控制系统的难度,且改变飞行姿态时,整个飞行器晃动厉害,在飞行时人体的舒适度较差。
技术实现要素:
3.本发明的发明目的在于:针对现有技术的单人飞行器,通过改变旋翼的总距和周期螺距的方式来调节飞行器的飞行方向及速度时,存在结构的设计复杂、参数控制的要求高且飞行时人体的舒适度较差的问题,提供一种飞行器及控制方法,能够改变飞行器的移动方向和飞行速度,不需要复杂的结构设计来改变旋翼的总距和周期螺距,降低了参数控制的要求,飞行器改变飞行方向更加平稳,提高飞行时人体的舒适度。
4.为了实现上述目的,本发明采用的技术方案为:
5.一种飞行器,包括飞行架,所述飞行架固定有载体部件、两组旋翼组件和控制系统,所述载体部件位于所述飞行架的前方,所述载体部件用于载人,所述控制系统用于控制所述旋翼组件,两组所述旋翼组件相对于所述载体部件对称位于所述飞行架的左右两侧;
6.每组所述旋翼组件包括升力旋翼和姿态旋翼一和姿态旋翼二,所述升力旋翼正向固定于所述飞行架上,且所述升力旋翼的旋转轴朝所述飞行架的前方倾斜设置,所述姿态旋翼一反向垂直固定于所述飞行架上,且相对于所述升力旋翼对称设置多个,所述姿态旋翼二反向固定于所述飞行架上,且所述姿态旋翼二旋转轴朝所述飞行架的后方倾斜设置。
7.旋翼进行常规的正向安装时,旋翼提供的作用力朝上,则反向安装旋翼时,旋翼提供的作用力朝下,所述飞行架作为飞行器的连接主体,飞行员通过所述载体部件与所述飞行架固定,通过倾斜设置的所述升力旋翼,能够提供飞行器上升和前进的动力,通过反向设置的所述姿态旋翼一,能够调节升力旋翼提供的上升动力,进而控制飞行器的升降状态,通过反向倾斜设置的所述姿态旋翼二,能够调节升力旋翼的前进动力,进而控制飞行器的前进状态,再通过相互对称设置的两组所述旋翼组件,调节所述飞行架左右两侧的所述旋翼组件提供大小不同的前进动力,进而控制飞行器的转向,改变飞行器在空中的移动方向,因此,通过两组所述旋翼组件的各个旋翼在不同位置的作用力配合,只需要控制各个旋翼的转速,就能够改变飞行器在空中移动方向以及速度状态;
8.本发明的一种飞行器,旋翼以固定的螺距工作,通过两组所述旋翼组件在多个不同位置的旋翼进行配合工作,利用多个旋翼的转速差实现对飞行器飞行方向和速度的控制,仅需控制多个旋翼的转速参数,从而不需要改变旋翼的总距和周期螺距,避免了复杂的
结构设计,降低了参数控制的要求,且多个旋翼的作用力相互配合,使得飞行器能够更加平稳地改变飞行方向,有效减弱飞行器的晃动幅度,提高飞行时人体的舒适度。
9.优选地,所述升力旋翼的旋转轴相对于竖直面的倾斜角度为10~30度。
10.设置所述倾斜角度的选择需要保证所述升力旋翼提供飞行器足够的上升动力,同时也能够提供一定的前进动力,使飞行器保持在空中时,具有合适的动力进行前进和转向操作。
11.优选地,所述姿态旋翼二相对于竖直面的倾斜角度与所述升力旋翼的倾斜角度相当。
12.相较于所述姿态旋翼一,所述姿态旋翼二主要是可以调节所述升力旋翼的水平分力,进而控制飞行器进行减速或转向操作,倾斜角度的设置使所述姿态旋翼二与所述升力旋翼保持平行,能够减少在旋翼转动时发生相互扰动的影响,提高旋翼组件运行的稳定性。
13.优选地,所述旋翼组件还包括t型安装架,所述t型安装架的交叉位置与所述飞行架固定,且所述t型安装架水平位于所述飞行架的左右两侧,所述升力旋翼也固定于所述t型安装架的交叉位置,所述姿态旋翼一固定于所述t型安装架的水平两端,所述姿态旋翼二固定于所述t型安装架的竖直端。
14.所述t型安装架便于多个旋翼的安装,可以将所述旋翼组件的多个旋翼预先固定安装于所述t型安装架上,最后再将整个所述旋翼组件固定于所述飞行架上,生产组装快捷,便于进行维修替换,同时所述t型安装架也能够使多个旋翼保持合适的间距,减小多个旋翼在旋转时受到相邻旋翼的扰动影响。
15.优选地,所述姿态旋翼一和所述姿态旋翼二的规格尺寸相同。
16.将所述姿态旋翼一和所述姿态旋翼二统一为相同的规格尺寸,便于零件的安装替换以及生产准备,降低生产及安装的难度,维修方便。
17.优选地,所述升力旋翼的直径为0.6~1m,所述姿态旋翼一和所述姿态旋翼二的直径为0.3~0.5m。
18.旋翼直径的选择既需要保证旋翼产生足够的动力用于起飞和调节,也需要结合安装位置的限制,保证各个旋翼能稳定工作。
19.优选地,所述飞行架为t型架,所述旋翼组件固定于所述t型架水平段的两端,所述载体部件为座椅,所述座椅固定于所述t型架的竖直段。
20.所述t型架作为飞行器的主体部分,结构简单,能够有效减少自身的自重,同时能够满足飞行器其它组件的安装需求,所述旋翼组件刚好对称所述座椅安装于座椅的左右两侧,从而便于对飞行器进行转向调节,飞行时也利于保持座椅的平稳,所述座椅进一步提高了飞行员使用飞行器的舒适度。
21.优选地,所述t型架的水平段长度为2.8~3.2m,所述t型架的竖直段长度为1.8~2.2m。
22.所述t型架的尺寸设计需要结合所述旋翼组件中各个旋翼的直径,能够保持足够的间距使两侧的旋翼组件稳定工作,同时所述载体组件与所述旋翼组件之间具有足够的安全距离。
23.优选地,所述控制系统的主体部分固定于所述t型架的交叉位置。
24.所述控制系统的主体部分包含电源及电路板结构,所述控制系统的安装位置不仅
能保持所述t型架的受力平衡,且充分利用了所述t型架竖直段的高度,使所述控制系统和载体系统具有足有的安全距离。
25.优选地,所述控制系统设有操控手柄,所述操控手柄固定于所述座椅的扶手位置。
26.所述操控手柄用于控制旋翼组件中各个旋翼的工作,所述操控手柄的安装位置便于飞行员在空中进行操控。
27.优选地,所述t型架底部还固定有放置架,所述放置架设于所述座椅的底面,所述放置架固定有多个滑轮,所述滑轮用于支撑所述放置架。
28.所述放置架作为飞行器的最底部便于飞行器竖直放置于地面上,所述滑轮则便于飞行器在地面上进行移运。
29.一种飞行器的控制方法,控制如上所述的一种飞行器,飞行器在空中的前进、升降或转向状态的控制方法分别如下:
30.一、飞行器在空中的前进包括匀速前进、加速前进和减速前进,每个状态的控制方法如下:
31.需匀速前进时,控制升力旋翼的转速使飞行器的水平受力平衡;
32.需加速前进时,在匀速前进的基础上增大升力旋翼的转速;
33.需减速前进时,同步启动两个姿态旋翼二,抵消飞行器的部分水平动力;
34.二、飞行器在空中的升降包括匀速升降、加速升降、减速升降和停止升降,每个状态的控制方法如下:
35.需匀速升降时,在飞行器在上升过程或下降过程中,控制升力旋翼的转速使飞行器的竖直受力平衡;
36.需加速上升时,在匀速上升的基础上增大升力旋翼的转速;
37.需加速下降时,在匀速下降的基础上减小升力旋翼的转速,或者同步启动飞行架左右两侧的姿态旋翼一辅助下降;
38.需减速上升时,减小升力旋翼的转速,或者同步启动飞行架左右两侧的姿态旋翼二,抵消飞行器的部分竖向动力;
39.需减速下降时,增大升力旋翼的转速;
40.需上升过程中停止升降时,在减速上升的基础上,减小升力旋翼的转速使飞行器的竖向动力与重力平衡,或者同步控制飞行架左右两侧的姿态旋翼一进行辅助平衡;
41.需下降过程中停止升降时,在减速下降的基础上,增大升力旋翼的转速使飞行器的竖向动力与重力平衡;
42.三、飞行器在空中的转向状态的控制方法如下:
43.需改变姿态进行左右转向时,控制飞行架左右两侧的姿态旋翼二形成转速差;
44.需水平进行左右转向时,控制飞行架左右两侧的姿态旋翼二形成转速差;同时控制姿态旋翼一平衡姿态旋翼二在竖向动力上的差异。
45.在飞行器进行减速升降时,是在飞行器进行升降时适当的减小或增大升力旋翼的转速,升力旋翼转速的减小或增大的临界值是不能使飞行器停止升降,甚至改变升降状态;在飞行器改变姿态进行左右转向时,整个飞行器会形成一个倾斜转向的飞行姿态,转向的操控更简单;
46.飞行器在空中的前进状态、升降状态和转向能够相互组合进行控制,进而同时改
变飞行器的移动方向和速度,从而实现飞行器在空中的灵活飞行,本发明的一种飞行器的控制方法,通过控制飞行器多个不同位置的旋翼进行配合,利用多个旋翼的转速差实现对飞行器飞行方向和速度的控制,仅需控制多个旋翼的转速参数,从而不需要改变旋翼的总距和周期螺距,避免了复杂的结构设计,降低了参数控制的要求,且多个旋翼的作用力相互配合,使得飞行器能够更加平稳地改变飞行方向,有效减弱飞行器的晃动幅度,提高飞行时人体的舒适度。
47.综上所述,由于采用了上述技术方案,本发明的有益效果是:
48.1、本发明的一种飞行器,旋翼以固定的螺距工作,通过多个不同位置旋翼的配合设计,利用多个旋翼的转速差实现对飞行器飞行姿态的控制,仅需控制多个旋翼的转速参数,从而不需要改变旋翼的总距和周期螺距,避免了复杂的结构设计,降低了参数控制的要求,且多个旋翼的作用力相互配合,使得飞行器能够更加平稳地改变飞行姿态,有效减弱飞行器的晃动幅度,提高飞行时人体的舒适度;
49.2、通过对升力旋翼的倾斜角度的设计,保证了升力旋翼提供飞行器足够的上升动力,同时也能够提供一定的前进动力,使飞行器保持在空中时,具有合适的动力进行前进和转向操作;
50.3、通过对姿态旋翼二的倾斜角度的设置,使姿态旋翼二与升力旋翼保持平行,能够减少在旋翼转动时发生相互扰动的影响,提高了旋翼组件运行的稳定性;
51.4、通过t型架作为飞行器的主体部分,结构简单,能够有效减少自身的自重,同时能够满足飞行器其它组件的安装需求;
52.5、本发明的一种飞行器,设计结构简单,载人飞行时,操控飞行器的飞行方便,飞行员乘坐飞行器的舒适度很好,具有良好的应用前景;
53.6、本发明的一种飞行器的控制方法,通过控制飞行器多个不同位置的旋翼进行配合,利用多个旋翼的转速差实现对飞行器飞行方向和速度的控制,仅需控制多个旋翼的转速参数,从而不需要改变旋翼的总距和周期螺距,避免了复杂的结构设计,降低了参数控制的要求,且多个旋翼的作用力相互配合,使得飞行器能够更加平稳地改变飞行方向,有效减弱飞行器的晃动幅度,提高飞行时人体的舒适度。
附图说明
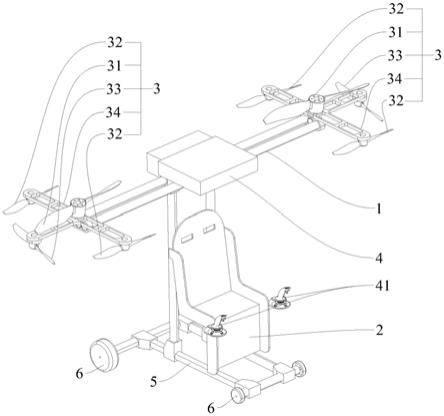
54.图1是实施例1所述的一种飞行器的结构示意图;
55.图2是实施例1所述的一种飞行器的侧面示意图;
56.图3是实施例1所述旋翼组件的结构示意图;
57.图4是实施例1所述旋翼组件的侧面示意图;
58.图中标记:1
‑
飞行架,2
‑
载体部件,3
‑
旋翼组件,31
‑
升力旋翼,32
‑
姿态旋翼一,33
‑
姿态旋翼二,34
‑
t型安装架,4
‑
控制系统,41
‑
操控手柄,5
‑
放置架,6
‑
滑轮。
具体实施方式
59.下面结合附图,对本发明作详细的说明。
60.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明,应当理解,此处所描述的具体实施例仅用以解释本发明,并不
用于限定本发明。
61.实施例1
62.如图1
‑
图2所示,本发明的一种飞行器,包括飞行架1,飞行架1固定有载体部件2、两组旋翼组件3和控制系统4,载体部件2位于飞行架1的前方,载体部件2用于载人,控制系统4用于控制旋翼组件3,两组旋翼组件3相对于载体部件2对称位于飞行架1的左右两侧;
63.每组旋翼组件3包括升力旋翼31和姿态旋翼一32和姿态旋翼二33,升力旋翼31正向固定于飞行架1上,且升力旋翼31的旋转轴朝飞行架1的前方倾斜设置,姿态旋翼一32反向垂直固定于飞行架1上,且相对于升力旋翼31对称设置多个,姿态旋翼二33反向固定于飞行架1上,且姿态旋翼二33旋转轴朝飞行架1的后方倾斜设置。
64.在本实施例中,升力旋翼31的直径为800mm,姿态旋翼一32和姿态旋翼二33的直径均为400mm,升力旋翼31的最大功率在倾斜角度的分力作用下能够带动150kg的重量上升,飞行器的自重为30kg,飞行器的载重能够达到120kg,飞行架1为t型架,t型架的水平段长度为3m,竖直段长度为2m,控制系统4的主体部分固定于t型架的交叉位置,载体部件2为座椅,座椅位于t型架的前方并固定于t型架的竖直段,座椅的底面与t型架的底面齐平,控制系统4还连接有操控手柄41,操控手柄41固定于座椅的扶手位置,t型架的底面与座椅底面还水平固定有一个放置架5,放置架5底部的四周均设有滑轮6,飞行器能够通过放置架5竖直放置于地面,并能通过滑轮6水平滑动。
65.t型架水平段的两端均固定有一个旋翼组件3,旋翼组件3还包括t型安装架34,t型安装架34的交叉位置固定于t型架水平段的端部,且t型安装架34水平设置,即t型安装架34的竖直段与t型架的水平段共线,且t型安装架34与t型架的水平段位于同一水平面;
66.如图3
‑
图4所示,每个旋翼组件3均有一个升力旋翼31、两个姿态旋翼一32和一个姿态旋翼二33,升力旋翼31正向固定于t型安装架34的上方,位于t型安装架34的交叉位置,将升力旋翼31的旋转轴朝向t型安装架34水平段的一端倾斜固定,且朝向着t型架的前方,相对于竖直面的倾斜角度a为15度;
67.两个姿态旋翼一32分别反向垂直固定于t型安装架34的下方,位于t型安装架34的水平两端,姿态旋翼一32的旋转轴竖向设置;
68.姿态旋翼二33也反向固定于t型安装架34的下方,位于t型安装架34的竖直端,将姿态旋翼二33的旋转轴朝向t型安装架34水平段的一端倾斜固定,且朝向着t型架的后方,相对于竖直面的倾斜角度b也为15度。
69.在本实施例中,根据设计需求,保证升力旋翼31具有带动飞行器上升的动力下,也可以不断增大升力旋翼31的倾斜角度,获取更多的前进动力,姿态旋翼一32和姿态旋翼二33也可以根据实际需求选用不同的直径尺寸。
70.实施例2
71.一种飞行器的控制方法,控制如实施例1所述的一种飞行器,飞行器在空中的前进、升降或转向状态的控制方法分别如下:
72.一、飞行器在空中的前进包括匀速前进、加速前进和减速前进,每个状态的控制方法如下:
73.需匀速前进时,控制升力旋翼31的转速使飞行器的水平受力平衡;
74.需加速前进时,在匀速前进的基础上增大升力旋翼31的转速;
75.需减速前进时,同步启动两个姿态旋翼二33,抵消飞行器的部分水平动力;
76.二、飞行器在空中的升降包括匀速升降、加速升降、减速升降和停止升降,每个状态的控制方法如下:
77.需匀速升降时,在飞行器在上升过程或下降过程中,控制升力旋翼31的转速使飞行器的竖直受力平衡;
78.需加速上升时,在匀速上升的基础上增大升力旋翼31的转速;
79.需加速下降时,在匀速下降的基础上减小升力旋翼31的转速,或者同步启动飞行架1左右两侧的姿态旋翼一32辅助下降;
80.需减速上升时,减小升力旋翼31的转速,或者同步启动飞行架1左右两侧的姿态旋翼二33,抵消飞行器的部分竖向动力;
81.需减速下降时,增大升力旋翼31的转速;
82.需上升过程中停止升降时,在减速上升的基础上,减小升力旋翼31的转速使飞行器的竖向动力与重力平衡,或者同步控制飞行架1左右两侧的姿态旋翼一32进行辅助平衡;
83.需下降过程中停止升降时,在减速下降的基础上,增大升力旋翼31的转速使飞行器的竖向动力与重力平衡;
84.三、飞行器在空中的转向状态的控制方法如下:
85.需改变姿态进行左右转向时,控制飞行架1左右两侧的姿态旋翼二33形成转速差;
86.需水平进行左右转向时,控制飞行架1左右两侧的姿态旋翼二33形成转速差;同时控制姿态旋翼一32平衡姿态旋翼二33在竖向动力上的差异。
87.在本实施例中,同步启动飞行架1的两个升力旋翼31,飞行器则能够以同步上升和前进的飞行姿态开始飞行,
88.当飞行器在空中仅保持前进时,同步启动四个姿态旋翼一32,抵消部分升力旋翼31在竖直方向的动力,使飞行器的竖直受力平衡,则飞行器仅受到升力旋翼31的水平驱动力而水平前进;
89.当飞行器在空中需要降低前进速度时,同步启动两个姿态旋翼二33,抵消飞行器的部分水平动力;
90.当飞行器在空中需要左转向时,增大飞行器左侧的姿态旋翼二33的转速,使飞行器左侧的水平动力小于右侧的水平动力,进而使飞行器逐渐向左转向,同时,由于飞行器左侧的姿态旋翼二33也会抵消更多的竖向动力,因此飞行器在转向时,左侧的高度会低于右侧的高度,形成倾斜左转向的姿态;
91.同理,当飞行器在空中需要右转向时,增大飞行器右侧的姿态旋翼二33的转速,飞行器即可形成倾斜右转向的姿态;
92.在左右转向时,若不想形成一个左右高低不同的倾斜姿态,即飞行器在空中需要水平转向时,也可以控制姿态旋翼一32配合姿态旋翼二33,例如左转向时,飞行器左侧的姿态旋翼二33也会抵消更多的竖向动力,则可以同步控制飞行器右侧的姿态旋翼一32也配合抵消飞行器右侧的竖向动力,进而保持飞行器两侧的竖向受力相同,仅形成飞行器左侧的水平动力小于右侧的水平动力即可。
93.飞行器在空中的的前进状态、升降状态和转向能够相互组合进行控制,进而同时改变飞行器的移动方向和速度,
94.例如当飞行器在空中上升并前进的飞行,需要停止上升并加速前进时,则增大两个升力旋翼31的转速,提高飞行器的水平动力,此时升力旋翼31的竖向动力也会增大,同时启动四个姿态旋翼一32,抵消升力旋翼31的部分竖向动力,使飞行器受到的竖向动力逐渐与重力保持平衡,进而实现水平前进的加速飞行;
95.又例如进行当飞行器在空中上升并前进的飞行,需要减速上升并左转向时,首先控制飞行器左侧的姿态旋翼二33启动并保持一定的转速,飞行器右侧的姿态旋翼二33不启动或启动后转速低于左侧的姿态旋翼二33,同时同步启动四个姿态旋翼一32,抵消升力旋翼31部分的竖向动力,则飞行器减速上升的同时会倾斜进行左转向,若要水平进行转向,则需要飞行器左侧和右侧的姿态旋翼一32也形成转速差,保证飞行器左侧的姿态旋翼一32和姿态旋翼二33合计抵消的竖向动力与飞行器右侧相同,则飞行器能够减速上升的同时会水平进行左转向。
96.飞行器其它的飞行方向以及速度改变的组合状态,在各个旋翼结构设计的基础上,通过受力分析可以推论得出,此处不在一一赘述,总的来说,在飞行器的各种减速运动中,不仅能够通过降低升力旋翼31的转速来实现,还可以通过姿态旋翼一32和姿态旋翼二33进行配合,反向抵消升力旋翼的竖直动力和水平动力,灵活进行各种减速运动,例如启动姿态旋翼一32以适当的转速抵消升力旋翼31部分的竖向动力,则飞行器能够保持前进速度不变而上升速度降低的状态;
97.同理,在飞行器的各种加速运动中,同样可以通过姿态旋翼一32和姿态旋翼二33进行配合调节,灵活进行各种加速运动,例如增大升力旋翼31的转速时,启动姿态旋翼一32,通过控制系统4使姿态旋翼一32时刻抵消掉升力旋翼31在竖直方向上的升力增量,则飞行器的上升速度能保持不变,仅加大前进速度。
98.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。