1.本实用新型涉及飞行器领域,特别是涉及一种具有着陆自动反冲功能的四轴飞行器。
背景技术:
2.无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为无人固定翼飞机、无人垂直起降飞机 、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点,飞行器通过四个方向的螺旋桨提供抬升动力,对螺旋桨进行控制就能可以控制飞行器的飞行状态,而飞行器的操控具有一定的难度,尤其是飞行器的软着陆等操作,需要专业的操控才可以完美实现,而对于民用飞行器来说,设置反冲喷气缓冲着陆功能可以有效的实现飞行器的软着陆。
技术实现要素:
3.本实用新型主要解决的技术问题是提供一种具有着陆自动反冲功能的四轴飞行器,能够在飞行器即将着陆的时候自动向下喷射反冲气体,达到平稳着陆的目的。
4.为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种具有着陆自动反冲功能的四轴飞行器,包括飞行器本体,所述飞行器本体包括中央机体和机翼架杆,所述机翼架杆连接在所述中央机体的四周,所述机翼架杆的末端连接有机箱壳体,所述机箱壳体的内部安装有直流电机,所述直流电机的上端导出转轴,所述转轴的顶端连接螺旋桨,所述中央机体的下端面连接若干个反冲喷射管,所述反冲喷射管的下端面设开口,所述中央机体的上端面四周向下开设若干个圆柱形凹槽,所述凹槽的内部设圆柱形的罐装气压瓶,所述罐装气压瓶的下端连接电磁阀,所述电磁阀下端连接输气管,所述输气管连接所述反冲喷射管,所述中央机体的内部安装有单片微机和继电器,所述机箱壳体的下端面均安装有激光测距传感器,所述激光测距传感器输出端与所述单片微机的输入端连接,所述单片微机连接所述继电器,所述继电器连接并控制所述电磁阀。
5.在本实用新型一个较佳实施例中,所述凹槽的顶端面平整的契合有盖板,所述盖板的下端面设有弹簧抵触到所述罐装气压瓶的上端。
6.在本实用新型一个较佳实施例中,所述单片微机内部集成有a/d转换芯片,所述激光测距传感器内部集成有光电转换器。
7.在本实用新型一个较佳实施例中,所述螺旋桨的外侧面连接防撞保护架。
8.本实用新型的有益效果是:本实用新型在飞行器的下端设计了反冲喷气的软着陆辅助装置,为了避免飞行器在操作不当的情况下发生硬性着陆而导致对机体造成损伤,飞行器的螺旋桨下端设有激光测距传感器,用于测量机体和地面的位置,将数据反馈到控制单元,就能够在距离达到设定阈值高度的时候自动启动气体喷射,并且触发条件为四轴螺
旋桨下方均要数据一致,避免因树木等细小干扰物导致系统发生误判。
附图说明
9.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
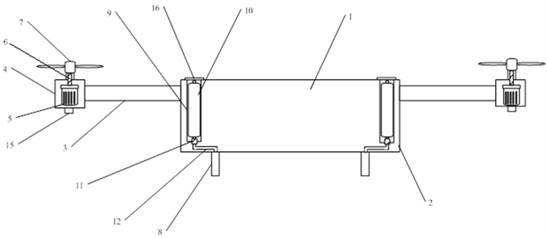
10.图1是本实用新型具有着陆自动反冲功能的四轴飞行器一较佳实施例的结构示意图;
11.图2是本实用新型具有着陆自动反冲功能的四轴飞行器一较佳实施例的电路结构示意图;
12.附图中各部件的标记如下:1、飞行器本体;2、中央机体;3、机翼架杆;4、机箱壳体;5、直流电机;6、转轴;7、螺旋桨;8、反冲喷射管;9、凹槽;10、罐装气压瓶;11、电磁阀;12、输气管;13、单片微机;14、继电器;15、激光测距传感器;16、盖板。
具体实施方式
13.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
14.请参阅图1和图2,本实用新型实施例包括:
15.一种具有着陆自动反冲功能的四轴飞行器,包括飞行器本体1,所述飞行器本体1包括中央机体2和机翼架杆3,所述机翼架杆3连接在所述中央机体2的四周,所述机翼架杆3的末端连接有机箱壳体4,所述机箱壳体4的内部安装有直流电机5,所述直流电机5的上端导出转轴6,所述转轴6的顶端连接螺旋桨7,所述中央机体2的下端面连接若干个反冲喷射管8,所述反冲喷射管8的下端面设开口,所述中央机体2的上端面四周向下开设若干个圆柱形凹槽9,所述凹槽9的内部设圆柱形的罐装气压瓶10,所述罐装气压瓶10的下端连接电磁阀11,所述电磁阀11下端连接输气管12,所述输气管12连接所述反冲喷射管8,所述中央机体2的内部安装有单片微机13和继电器14,所述机箱壳体4的下端面均安装有激光测距传感器15,所述激光测距传感器15输出端与所述单片微机13的输入端连接,所述单片微机13连接所述继电器14,所述继电器14连接并控制所述电磁阀11。
16.另外,所述凹槽9的顶端面平整的契合有盖板16,所述盖板16的下端面设有弹簧抵触到所述罐装气压瓶10的上端。
17.另外,所述单片微机13内部集成有a/d转换芯片,所述激光测距传感器15内部集成有光电转换器。
18.另外,所述螺旋桨7的外侧面连接防撞保护架。
19.本实用新型的工作原理为飞行器本体1包括中央机体2和机翼架杆3,机翼架杆3连接在中央机体2的四周,机翼架杆3的末端连接有机箱壳体4,机箱壳体4的内部安装有直流电机5,直流电机5的上端导出转轴6,转轴6的顶端连接螺旋桨7,直流电机5驱动螺旋桨7旋
转产生升力而带动整个机体飞行。
20.中央机体2的下端面连接若干个反冲喷射管8,反冲喷射管8的下端面设开口,中央机体2的上端面四周向下开设若干个圆柱形凹槽9,凹槽9的内部设圆柱形的罐装气压瓶10,罐装气压瓶10的下端连接电磁阀11,电磁阀11下端连接输气管12,输气管12连接反冲喷射管8,电磁阀11打开则喷射高压气体,电磁阀11闭合则无法喷射气体。
21.中央机体2的内部安装有单片微机13和继电器14,机箱壳体4的下端面均安装有激光测距传感器15,激光测距传感器15输出端与单片微机13的输入端连接,单片微机13连接继电器14,继电器14连接并控制电磁阀11,激光测距传感器15位于每一根方向轴上的螺旋桨机箱下方,为了避免机体飞临树叶或枝干上方的时候发生错误的判断,所以每一个激光测距传感器15均要输出相近的阈值数据后控制单元才会判定需要启动喷气。
22.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
技术特征:
1.一种具有着陆自动反冲功能的四轴飞行器,包括飞行器本体,其特征在于,所述飞行器本体包括中央机体和机翼架杆,所述机翼架杆连接在所述中央机体的四周,所述机翼架杆的末端连接有机箱壳体,所述机箱壳体的内部安装有直流电机,所述直流电机的上端导出转轴,所述转轴的顶端连接螺旋桨,所述中央机体的下端面连接若干个反冲喷射管,所述反冲喷射管的下端面设开口,所述中央机体的上端面四周向下开设若干个圆柱形凹槽,所述凹槽的内部设圆柱形的罐装气压瓶,所述罐装气压瓶的下端连接电磁阀,所述电磁阀下端连接输气管,所述输气管连接所述反冲喷射管,所述中央机体的内部安装有单片微机和继电器,所述机箱壳体的下端面均安装有激光测距传感器,所述激光测距传感器输出端与所述单片微机的输入端连接,所述单片微机连接所述继电器,所述继电器连接并控制所述电磁阀。2.根据权利要求1所述的具有着陆自动反冲功能的四轴飞行器,其特征在于,所述凹槽的顶端面平整的契合有盖板,所述盖板的下端面设有弹簧抵触到所述罐装气压瓶的上端。3.根据权利要求1所述的具有着陆自动反冲功能的四轴飞行器,其特征在于,所述单片微机内部集成有a/d转换芯片,所述激光测距传感器内部集成有光电转换器。4.根据权利要求1所述的具有着陆自动反冲功能的四轴飞行器,其特征在于,所述螺旋桨的外侧面连接防撞保护架。
技术总结
本实用新型公开了一种具有着陆自动反冲功能的四轴飞行器,包括飞行器本体,所述飞行器本体包括中央机体和机翼架杆,所述机翼架杆连接在所述中央机体的四周,所述机翼架杆的末端连接有机箱壳体,所述机箱壳体的内部安装有直流电机,所述直流电机的上端导出转轴,所述转轴的顶端连接螺旋桨,所述中央机体的下端面连接反冲喷射管,所述反冲喷射管的下端面设开口,所述中央机体的上端面四周向下开设若干个圆柱形凹槽,所述凹槽的内部设圆柱形的罐装气压瓶,所述罐装气压瓶连接电磁阀,所述电磁阀下端连接输气管,所述输气管连接所述反冲喷射管。通过上述方式,本实用新型能够在飞行器即将着陆的时候自动向下喷射反冲气体,达到平稳着陆的目的。着陆的目的。着陆的目的。
技术研发人员:朱赛花
受保护的技术使用者:无锡海耀科技服务有限公司
技术研发日:2021.01.31
技术公布日:2021/12/21