1.本发明涉及一种飞行体、系统、及方法。
背景技术:
2.一直以来,喷射烟雾来提高视辨性的飞行体为人所周知(例如,专利文献1)。
3.[背景技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本专利特开2019-182379号公报
技术实现要素:
[0006]
[发明要解决的问题]
[0007]
然而,专利文献1的飞行体例如存在如下问题,即,由于是在与包含进行视辨的点的预先设定的点的位置无关的位置上喷射烟雾,因此无法提高从预先设定的点视辩飞行体的视辨性。
[0008]
由此,本发明鉴于所述问题,其目的在于提供一种可提高从预先设定的点视辩飞行体的视辨性的飞行体、系统、及方法。
[0009]
[解决问题的技术手段]
[0010]
为了达成上述目的,本发明的第1态样的飞行体的特征在于,
[0011]
其是在空间中飞行的飞行体,且具备:
[0012]
获取部,获取表示所述飞行体的位置的信息;及
[0013]
控制部,根据获取的所述信息而进行方向变更控制,即,使所述飞行体所具备的面、且为预先设定的颜色的面的第1面朝向预先设定的点,或
[0014]
根据获取的所述信息而进行显示控制,即,在所述飞行体具备的显示装置的显示面、且为朝向所述预先设定的点的一部分面或整个面的第2面上显示所述预先设定的颜色的图像。
[0015]
[发明的效果]
[0016]
根据本发明的飞行体、系统、及方法,可提高从预先设定的点视辩飞行体的视辨性。
附图说明
[0017]
图1是表示本发明的实施例1的飞行系统的一构成例的系统构成图。
[0018]
图2是表示实施例1的飞行体的方向的一例的图。
[0019]
图3是表示飞行系统具备的控制装置的一构成例的硬件构成图。
[0020]
图4是表示实施例1的飞行体的一外观例的外观构成图。
[0021]
图5是表示飞行体具备的控制装置的一构成例的硬件构成图。
[0022]
图6是表示实施例1的飞行体执行的飞行控制处理的一例的流程图。
[0023]
图7是表示飞行体具备的控制装置所具有的功能的一例的功能方块图。
[0024]
图8是表示实施例1的飞行体存储的终端表格的一例的图。
[0025]
图9是表示飞行体存储的地图表格的一例的图。
[0026]
图10是表示飞行体执行的飞行路径决定处理的一例的流程图。
[0027]
图11是表示实施例1的飞行体执行的方向变更控制处理的一例的流程图。
[0028]
图12是表示终端装置的一构成例的硬件构成图。
[0029]
图13是表示飞行体具备的摄像装置的硬件构成的一例的图。
[0030]
图14是表示实施例2的飞行体执行的飞行控制处理的一例的流程图。
[0031]
图15是表示飞行体执行的颜色设定处理的一例的流程图。
[0032]
图16是表示水平面与飞行体600的前方向所成的最小俯角的一例的图。
[0033]
图17是表示实施例3的飞行体执行的飞行控制处理的一例的流程图。
[0034]
图18是表示实施例4的飞行体存储的终端表格的一例的图。
[0035]
图19是表示实施例4的飞行体执行的飞行控制处理的一例的流程图。
[0036]
图20是表示实施例4的飞行体的方向的一例的图。
[0037]
图21是表示实施例5的飞行体执行的飞行控制处理的一例的流程图。
[0038]
图22是表示实施例5的飞行体执行的方向变更控制处理的一例的流程图。
[0039]
图23是表示实施例6的飞行体的一外观例的外观构成图。
[0040]
图24是表示实施例6的飞行体执行的飞行控制处理的一例的流程图。
[0041]
图25是表示飞行体执行的第2显示控制处理的一例的流程图。
[0042]
图26是表示第2面的一例的图。
具体实施方式
[0043]
<实施例1>
[0044]
以下,参照附图对本发明的实施例1进行说明。
[0045]
本发明的实施例1的飞行系统1具备:图1所示的控制装置100,控制在预先规定的配送地域进行的物品配送;及飞行体600,按照控制装置100的控制,储存着该物品飞行至图2所示的物品的配送目的地ad。因此,飞行系统1也称为配送系统。
[0046]
配送地域包含预先规定的第1地域、及与第1地域不同的预先规定的第2地域。第1地域中设置有进行物品配送的图2所示的配送业者的营业场所bo。本实施例中,为简化说明,将第1地域与第2地域统称为预先规定的地域。
[0047]
第1地域的上空空域称为第1观察空域ab1,在飞行体600于第1观察空域ab1中飞行的期间,配送业者的从业人员(以下,称为第1观察者)观察飞行体600来侦测飞行体600产生的异常。本实施例中,配送业者的从业人员观察飞行体600,但并不限定于此,从业人员也可监控飞行体600。
[0048]
第2地域的上空空域称为第2观察空域ab2,在飞行体600于第2观察空域ab2中飞行的期间,与第1观察者不同的配送业者的从业人员(以下,称为第2观察者)观察飞行体600。
[0049]
因此,图1所示的飞行系统1还具备:第1终端装置800,由第1观察者携带;及第2终端装置900,由第2观察者携带。第1观察者使用第1终端装置800的通话功能将飞行体600的观察结果报告给飞行体600的操纵员,第2观察者使用第2终端装置900的通话功能将对在第
2观察空域ab2中飞行的飞行体600进行观察的结果报告给操纵员。本实施例中,为了简化说明,将第1观察者与第2观察者统称为观察者,将第1终端装置800与第2终端装置900统称为终端装置。
[0050]
操纵员通过操作控制装置100而使控制装置100发送命令飞行体600飞行至物品的配送目的地ad的飞行命令。飞行体600接收到飞行命令后,不必需要由操纵员来操作可自主向配送目的地ad飞行。
[0051]
操纵员例如当由观察者经由终端装置报告飞行体600冒烟等飞行体600的异常时,对控制装置100进行操作,以使飞行体600着陆到距飞行体600的位置最近、且不禁止飞行体600着陆的场所。控制装置100根据该操作而对飞行体600发送命令着陆的着陆命令,飞行体600接收到着陆命令后,按照着陆命令自主进行着陆。
[0052]
本实施例中,不禁止飞行体600着陆的场所,包含例如道路、河滩、或公园,但并不限定于此,可为任意的与禁止着陆的场所不同的场所。
[0053]
控制装置100为伺服机,设置在配送业者的营业场所bo。控制装置100具备图3所示的cpu(central processing unit,中央处理器)101、ram(random access memory,随机存取存储器)102、rom(read only memory,只读存储器)103a、硬盘103b、数据通信电路104a、显卡105a、显示装置105b、输入装置105c、扬声器109a、及麦克风109b。
[0054]
控制装置100的cpu101通过执行保存在rom103a或硬盘103b中的程序,而对控制装置100整体进行控制。ram102在由cpu101执行程序时,暂时存储作为处理对象的数据。本实施例中,说明了控制装置100具备1个cpu101,但并不限定于此,也可具备多个cpu。此外,控制装置100也可具备多个ram或多个硬盘。
[0055]
控制装置100的rom103a及硬盘103b存储各种程序。此外,硬盘103b进而存储执行程序时所使用的各种数据、及保存着数据的表格。控制装置100也可具备闪速存储器来代替硬盘103b。
[0056]
控制装置100的数据通信电路104a为nic(network interface card,网络接口卡),例如按照lte(long term evolution,长期演进)及5g(5th generation,第五代)等通信标准,用电波与连接于因特网in的未图示的基站进行数据通信。如此,控制装置100的数据通信电路104a与连接于因特网in的飞行体600、第1终端装置800、及第2终端装置900进行数据通信。
[0057]
控制装置100的显卡105a根据从cpu101输出的数字信号而对图像进行渲染,并且输出表示经渲染的图像的图像信号。显示装置105b为el(electroluminescence,电致发光)显示器,根据从显卡105a输出的图像信号来显示图像。控制装置100也可具备pdp(plasma display panel,等离子显示器面板)或lcd(liquid crystal display,液晶显示器)来代替el显示器。输入装置105c为键盘、鼠标、触摸板、及按钮中任一者以上,输入与操纵员的操作对应的信号。
[0058]
控制装置100的扬声器109a根据cpu101输出的信号来输出声音,麦克风109b输入表示周围声音的信号。
[0059]
飞行体600例如为无人机等无人飞机,着陆于配送业者的营业场所bo。飞行体600具备控制飞行体600的姿态及飞行的图4所示的立方形状的控制装置610。
[0060]
本实施例中,将控制装置610所具有的多个面中作为基准的面称为前表面,将与该
前表面的法线方向平行、且朝向控制装置610的外侧的方向称为飞行体600的前方向。此外,将控制装置610所具有的多个面中与前表面垂直的一个面称为上表面,将与该上表面的法线方向平行、且朝向控制装置610的外侧的方向称为飞行体600的上方向。
[0061]
飞行体600具备分别从控制装置610的前表面向右前方向及左前方向、及从控制装置610的后表面向左后方向及右后方向突出的螺旋桨臂621及622、及623及624。进而,飞行体600具备:螺旋桨631至634,分别设置在从螺旋桨臂621至624与控制装置610的连接部分至螺旋桨臂621至624的前端的位置;及未图示的电动机,按照控制装置610的控制来使螺旋桨631至634旋转。
[0062]
此外,飞行体600具备带状的螺旋桨护罩641,该螺旋桨护罩641搭设在螺旋桨臂621的前端与螺旋桨臂622的前端,保护螺旋桨631及632不与人、动物、或飞行体600以外的物体碰撞。进而,飞行体600具备:螺旋桨护罩642,搭设在螺旋桨臂622及623的前端,且保护螺旋桨632及633;螺旋桨护罩643,搭设在螺旋桨臂623及624的前端,且保护螺旋桨633及634;及螺旋桨护罩644,搭设在螺旋桨臂621及624的前端,且保护螺旋桨631及634。
[0063]
螺旋桨护罩641至644,例如由碳纤维强化塑料等具有可挠性及弹性的部件构成,缓冲因与人、动物、或物体碰撞而产生的冲击。
[0064]
螺旋桨护罩641所具有的2个宽幅面中的1个面(以下,称为第1面)pl1被着色为预先设定的颜色。相对于此,螺旋桨护罩641的与第1面pl1不同的宽幅面、及螺旋桨护罩642至644分别具有的2个宽幅面被着色为与预先设定的颜色不同的颜色。
[0065]
本实施例中,第1面pl1的颜色被预先设定为比螺旋桨护罩641所具有的与第1面pl1不同的宽幅面的颜色、及螺旋桨护罩642至644分别具有的2个宽幅面的颜色的视辨性高的颜色。本实施例中,视辨性较高的颜色包含警戒色,警戒色包含飞行体600飞行的环境的颜色的补色。此外,飞行体600飞行的环境的颜色含有包含第1观察者及第2观察者的观察者观察飞行体600时所观察到的飞行体600的背景颜色。
[0066]
本实施例中,飞行体600在褐色砖造的房屋林立的街道中飞行,因此所观察到的飞行体600的背景颜色为褐色。因此,本实施例中,螺旋桨护罩641的第1面pl1被预先着色为褐色的补色即青绿色。
[0067]
此外,本实施例中,螺旋桨护罩641具有的与第1面pl1不同的宽幅面、及螺旋桨护罩642至644分别具有的2个宽幅面,被预先着色为运输公司的企业颜色即红色。
[0068]
螺旋桨护罩641以预先设定的颜色即警戒色的第1面pl1朝向飞行体600的前方向的方式设置在螺旋桨臂621及622的前端。本实施例中,第1面pl1朝向飞行体600的前方向是指第1面pl1的法线方向与飞行体600的前方向平行、且第1面pl1比与第1面pl1不同的螺旋桨护罩641的宽幅面位于更前侧。因此,可从飞行体600的前方向目视到朝向飞行体600的前方向的第1面pl1。
[0069]
螺旋桨护罩642以宽幅面朝向飞行体600的右方向的方式设置在螺旋桨臂622及623的前端。此外,螺旋桨护罩643及644分别以宽幅面朝向飞行体600的后方向及左方向的方式设置在螺旋桨臂621、623、及624的前端。
[0070]
飞行体600在控制装置610的下方具备:第1围持架651a,围持对物品打包的长方体形状的瓦楞纸板的侧面中的1个侧面所具有的4条边;及第2围持架651b,围持与由第1围持架651a围持的面(以下,称为第1围持面)对向的侧面(以下,称为第2围持面)所具有的4条
边。进而,飞行体600在控制装置610的下表面具备导轨652a及652b,该导轨652a及652b延伸设置在第1围持面及第2围持面的法线方向上,吊持第1围持架651a与第2围持架651b,且以第1围持架651a与第2围持架651b的移动方向为延伸设置方向。
[0071]
此外,飞行体600还具备未图示的电动机,该电动机根据控制装置610的控制,使第1围持架651a与第2围持架651b向相互接近的方向移动,以此使第1围持架651a与第2围持架651b围持物品。该未图示的电动机根据控制装置610的控制,使第1围持架651a与第2围持架651b向相互远离的方向移动,以此使第1围持架651a与第2围持架651b释放所围持的物品。
[0072]
进而,飞行体600具备支撑腿653,该支撑腿653从控制装置610的下表面向下方向突出,支撑控制装置610。
[0073]
此外,飞行体600还具备设置在控制装置610的前表面的lidar(light detection and ranging,光探测和测距)传感器661、及设置在控制装置610的后表面的未图示的lidar传感器。
[0074]
前表面的lidar传感器661在以飞行体600的前方向为基准方位的情况下,向与该基准方位所成的方位角为-90度至+90度、且与飞行体600的前方向所成的仰角为-90度至+90度的范围中所含的多个方向照射雷射光。前表面的lidar传感器661接收所照射的雷射光的反射光,并根据从照射雷射光至接收到反射光的时间,而测量至反射雷射光的多个反射点的距离。接下来,前表面的lidar传感器661根据雷射光的照射方向与测量的距离,针对多个反射点算出在以飞行体600的中心点为原点的飞行体600的三维坐标系中的坐标值。其后,前表面的lidar传感器661将算出的多个反射点的坐标值输出至控制装置610。
[0075]
后表面的lidar传感器在以飞行体600的后方向为基准方位的情况下,向与该基准方位所成的方位角为-90度至+90度、且与飞行体600的后方向所成的仰角为-90度至+90度的范围中所含的多个方向照射红外线的雷射光。此外,后表面的lidar传感器针对照射的雷射光的多个反射点算出在飞行体600的三维坐标系中的坐标值,并将算出的多个反射点的坐标值输出至控制装置610。
[0076]
前表面的lidar传感器661及后表面的lidar传感器将多个反射点的坐标值输出至控制装置610,以供控制装置610指定出以飞行体600为基准的所有方向上的物体的在三维空间中的坐标值及尺寸等。
[0077]
飞行体600的控制装置610具备图5所示的cpu611、ram612、rom613a、闪速存储器613b、数据通信电路614a、显卡615a、显示装置615b、输入装置615c、位置测量电路616、方位角传感器617a、姿态传感器617b、输入输出端口618、及驱动电路619。
[0078]
飞行体600具备的控制装置610的cpu611、ram612、rom613a、数据通信电路614a、显卡615a、显示装置615b、及输入装置615c的构成及功能,与图3所示的控制装置100具备的cpu101、ram102、rom103a、数据通信电路104a、显卡105a、显示装置105b、及输入装置105c的构成及功能相同。本实施例中,说明飞行体600的控制装置610具备1个cpu611,但并不限定于此,也可具备多个cpu。此外,控制装置610也可具备多个ram或多个硬盘。
[0079]
飞行体600的闪速存储器613b存储执行程序时所使用的各种数据、及保存数据的表格。飞行体600的控制装置610也可具备硬盘来代替闪速存储器613b。
[0080]
飞行体600的数据通信电路614a与经由因特网in连接的控制装置100、第1终端装置800、及第2终端装置900无线通信数据。
[0081]
飞行体600的位置测量电路616为qzss(quasi-zenith satellite system,准天顶卫星系统)电路。位置测量电路616接收从准天顶卫星发出的信号,根据接收到的信号来测量表示飞行体600的位置的维度、经度、及高度,并将表示测量的维度、经度、及高度的信号输出。位置测量电路616也可不为qzss电路,而为gps电路,该gps电路接收从gps(global positioning system,全球定位系统)卫星发出的gps信号,根据所接收的gps信号来测量表示飞行体600的位置的维度、经度、及高度。
[0082]
飞行体600的方位角传感器617a例如为磁传感器,从基准方位逆时针测量飞行体600的前方向与基准方位所成的方位角θ,并将表示测量的方位角θ的信号输出。本实施例中,基准方位为北,但并不限定于此,基准方位也可为包含例如南、东、西、或东南的任意方位。
[0083]
飞行体600的姿态传感器617b例如为陀螺仪,检测飞行体600的前方向与水平面所成的最小的俯角φ,并将表示检测出的俯角φ的信号输出。
[0084]
飞行体600的输入输出端口618连接于未图示的缆线,该缆线分别与前表面的lidar传感器661及后表面的lidar传感器连接。输入输出端口618将表示前表面的lidar传感器661及后表面的lidar传感器分别输出的坐标值的信号输入至cpu611。
[0085]
飞行体600的驱动电路619分别连接于:未图示的缆线,分别连接于使图4所示的螺旋桨631至634旋转的未图示的电动机;及缆线,连接于使第1围持架651a与第2围持架651b移动的未图示的电动机。驱动电路619根据cpu611输出的信号,驱动使螺旋桨631至634旋转的电动机、或使第1围持架651a与第2围持架651b移动的电动机。
[0086]
本实施例中,列举将第2地域中所含的图2所示的地点ad被指定为配送目的地的物品搬入到配送业者的营业场所bo的情况为具体例而进行以下说明。
[0087]
将物品搬入到营业场所bo后,在营业场所bo工作的操纵员读取对物品打包的瓦楞纸板上所贴的凭单而确认物品的配送目的地ad的住址。其后,操纵员将物品配置在飞行体600的第1围持架651a与第2围持架651b之间后,对飞行体600的控制装置610所具备的输入装置615c进行操作以使第1围持架651a及第2围持架651b围持物品。
[0088]
飞行体600的输入装置615c输入与该操作对应的信号后,飞行体600的cpu611将使第1围持架651a与第2围持架651b向相互接近的方向移动的控制信号输出至驱动电路619,以此使飞行体600储存物品。
[0089]
其后,操纵员对控制装置100的输入装置105c进行操作以输入配送目的地ad的住址。控制装置100的输入装置105c输入与操纵员的操作对应的信号后,控制装置100的cpu101从输入的信号中获取表示物品的配送目的地ad的住址的信息。接下来,cpu101从硬盘103b获取与表示获取的住址的信息预先建立对应而存储的表示维度、经度、及高度的信息。
[0090]
接下来,控制装置100的cpu101生成飞行命令,该飞行命令包含以维度、经度、及高度表示配送目的地ad的位置的信息,且命令飞行体600飞行至该配送目的地ad。其后,cpu101将生成的飞行命令以飞行体600为接收地而输出至数据通信电路104a,由此对飞行体600进行使飞行体600飞行至该配送目的地ad的控制。
[0091]
飞行体600的数据通信电路614a从控制装置100接收到飞行命令后,飞行体600的cpu611执行图6所示的飞行控制处理,即,进行使螺旋桨631至634旋转的控制以按照飞行命
令飞行。
[0092]
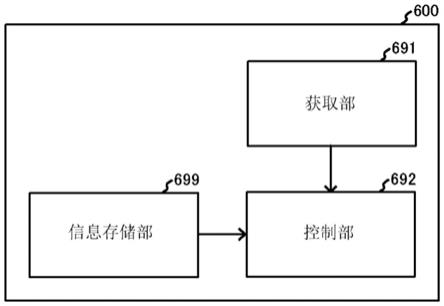
由此,飞行体600的cpu611作为图7所示的获取部691发挥功能,其根据从位置测量电路616输出的信号,而获取表示飞行体600的位置的信息。此外,cpu611作为控制部692发挥功能,其根据获取的信息而控制飞行体600的飞行。
[0093]
进而,飞行体600的闪速存储器613b作为预先存储图8所示的终端表格的信息存储部699发挥功能,该表格中保存观察飞行体600的第1观察者及第2观察者分别携带的第1终端装置800及第2终端装置900所相关的信息。
[0094]
终端表格中预先保存有多个记录,表示分配给第1观察者的第1终端装置800的通信地址的信息、与表示由第1观察者进行观察的第1观察空域ab1的范围的信息建立对应而预先保存在第1个记录中。相对于此,第1个记录中未保存表示第1观察者观察飞行体600的点(以下,称为第1观察点)pb1的位置的信息。这是因为,表示第1观察点pb1的位置的信息将通过执行图6的飞行控制处理而保存在第1个记录中。表示第1观察点pb1的位置的信息通过执行飞行控制处理来保存的原因在于,第1观察者是在由第1观察者认为易于观察第1观察空域ab1的第1地域内的位置进行观察,因此难以预先将表示第1观察点pb1的位置的信息保存到终端表格中。
[0095]
此外,表示由第2观察者携带的第2终端装置900的通信地址的信息、与表示第2观察者的第2观察空域ab2的范围的信息建立对应而预先保存在终端表格的第2个记录中。相对于此,第2个记录中未预先保存表示第2观察者进行观察的点(以下,称为第2观察点)pb2的位置的信息,表示第2观察点pb2的位置的信息将通过执行飞行控制处理而保存在第2个记录中。本实施例中,为简化说明,将第1观察点pb1与第2观察点pb2统称为观察点。
[0096]
本实施例中,表示第1观察空域ab1的范围的信息为使用维度、经度、及高度表示第1观察空域ab1具有的多个顶点的位置的信息,表示第2观察空域ab2的范围的信息为使用维度、经度、及高度表示第2观察空域ab2的顶点的位置的信息。此外,表示第1观察点pb1的位置的信息是用维度、经度、及高度表示第1观察点pb1的位置的信息,表示第2观察点pb2的位置的信息是用维度、经度、及高度表示第2观察点pb2的位置的信息,但并不限定于此。
[0097]
此外,飞行体600的信息存储部699预先存储未图示的着陆场所表格。着陆场所表格中,预先保存有用维度、经度、及高度表示在观察到飞行体600异常的情况下作为供飞行体600着陆的候选着陆场所的场所的位置的信息。作为候选着陆场所的场所只要为与禁止飞行体600着陆的场所不同的场所、且具有预先设定的面积以上的面积的场所,则可为任意场所。
[0098]
此外,飞行体600的信息存储部699预先存储图9所示的地图表格,该地图表格中保存有记载飞行体600进行配送的配送地域中的建造物及自然物的位置及形状的地图所相关的信息。
[0099]
地图表格中保存有多个记录,表示第1地域的范围的信息与表示第1地域的地图的地图信息建立对应而预先保存在第1个记录中。表示第2地域的范围的信息与表示第2地域的地图的信息建立对应而预先保存在第2个记录中。
[0100]
本实施例中,表示第1地域的范围的信息是用维度、经度、及高度表示第1地域具有的多个顶点的位置的信息。此外,第1地域的地图信息包含表示第1地域中的建造物的位置及形状的信息、与表示第1地域中的自然物的位置及形状的信息。建造物包含住房、大楼、教
会、及桥,表示建造物的位置及形状的信息是用维度、经度、及高度表示建造物具有的多个顶点的位置的信息。自然物包含树木及岩石,表示自然物的位置及形状的信息是用维度、经度、及高度表示自然物具有的多个顶点的位置的信息,但并不限定于此。
[0101]
相同地,本实施例中,表示第2地域的范围的信息是用维度、经度、及高度表示第2地域具有的多个顶点的位置的信息,但并不限定于此。此外,本实施例中,第2地域的地图信息包含表示第2地域中的建造物的位置及形状的信息、与表示第2地域中的自然物的位置及形状的信息。
[0102]
当开始执行飞行控制处理时,飞行体600的获取部691从数据通信电路614a获取飞行命令,并获取用维度、经度、及高度表示所获取的飞行命令中包含的配送目的地ad的位置的信息。接下来,飞行体600的控制部692将飞行体600的移动目的地设定为获取的信息所表示的配送目的地ad(步骤s01)。
[0103]
接下来,飞行体600的获取部691从图8的终端表格获取第1终端装置800的通信地址,控制部692将要求回复用维度、经度、及高度表示第1终端装置800的位置的信息的请求,以第1终端装置800的通信地址为接收地输出至数据通信电路614a。此外,相同地,获取部691获取第2终端装置900的通信地址,控制部692以第2终端装置900的通信地址为接收地输出请求。
[0104]
飞行体600的数据通信电路614a在将请求发送至第1终端装置800及第2终端装置900后,从第1终端装置800及第2终端装置900接收表示位置的信息。接下来,飞行体600的获取部691从数据通信电路614a获取这些信息(步骤s02)。
[0105]
接下来,飞行体600的控制部692将由获取部691获取的信息所表示的第1终端装置800的位置上的点设定为第1观察点pb1,该第1观察点pb1为携带第1终端装置800的第1观察者进行观察的点,且为飞行体600具有的预先设定的颜色的第1面pl1所朝向的点。此外,控制部692将表示第1观察点pb1的位置的信息与第1终端装置800的通信地址建立对应而保存在图8的终端表格的第1个记录中。相同地,控制部692将第2终端装置900的位置上的点设定为第2观察点pb2,该第2观察点pb2为携带第2终端装置900的第2观察者进行观察的点,且为飞行体600的第1面pl1所朝向的点,且将表示第2观察点pb2的位置的信息保存在终端表格的第2个记录中(步骤s03)。
[0106]
本实施例中,为简化说明,也将步骤s03中设定的第1观察点pb1称为第1设定点pb1,将第2观察点pb2称为第2设定点pb2,且将第1设定点pb1及第2设定点pb2统称为预先设定的点。
[0107]
其后,执行图10所示的飞行路径决定处理,即决定飞行体600的飞行路径为如下路径,该路径是从飞行体600的位置至步骤s01中设定的移动目的地ad为止,且通过可从作为第1设定点的第1观察点pb1目视的点与可从作为第2设定点的第2观察点pb2目视的点这双方(步骤s04)。
[0108]
当开始执行飞行路径决定处理时,飞行体600的获取部691根据从位置测量电路616输出的信号,获取表示飞行体600的位置的信息(步骤s21)。
[0109]
接下来,飞行体600的控制部692例如从信息存储部699读出未图示的部分路径表格,该部分路径表格中保存有道路及河流等飞行体600能够飞行的部分路径所相关的信息。部分路径表格中预先保存有多个记录,作为部分路径的边缘的起点节点的维度、经度、及高
度、与该边缘的终点节点的维度、经度、及高度、以及表示该边缘的距离的信息建立对应而预先保存在各记录中。
[0110]
接下来,飞行体600的控制部692使用飞行体600的位置、多个边缘的起点节点及终点节点、配送目的地ad的维度、经度、及高度,执行例如戴克斯特拉算法之类的路径探索演算法。由此,控制部692通过组合部分路径而决定从飞行体600的位置到达移动目的地ad的多个整体路径。
[0111]
接下来,飞行体600的控制部692在决定的多个整体路径中,按总飞行距离由短至长的顺序将第1个至第n个整体路径(其中,n为自然数)决定为使飞行体600飞行的候选飞行路径即候选路径(步骤s22)。其后,控制部692生成表示候选路径的信息。表示候选路径的信息包含用维度、经度、及高度表示候选路径中所含的多个通过点的位置的信息、与表示多个通过点的通过顺序的信息。
[0112]
接下来,飞行体600的控制部692获取地图信息(步骤s23),该地图信息是在图9所示的地图表格中与表示包含预先设定的点的预先规定的地域范围的信息建立对应。
[0113]
因此,飞行体600的控制部692从图8所示的终端表格的第1个记录中,获取表示第1设定点即第1观察点pb1的位置的信息。此外,控制部692获取表示图9的地图表格中保存的第1地域的范围的信息及表示第2地域的范围的信息。其后,控制部692根据获取的信息,指定出包含第1观察点pb1的地域为第1地域。接下来,控制部692获取在地图表格中与表示第1地域的范围的信息建立对应的地图信息。
[0114]
相同地,飞行体600的控制部692从终端表格的第2个记录中获取表示第2设定点即第2观察点pb2的位置的信息,指定出包含第2观察点pb2的地域为第2地域,并获取第2地域的地图信息。
[0115]
接下来,飞行体600的获取部691从图8所示的终端表格的第1个记录中,获取与表示第1观察点pb1的位置的信息建立对应的表示第1观察空域ab1的范围的信息。其后,控制部692在n个候选路径中所含的多个通过点中,指定出包含在第1观察空域ab1中、且无法从第1观察点pb1目视到的不可目视点。此外,控制部692在n个候选路径中所含的多个通过点中,指定出包含在第1观察空域ab1中、且可从第1观察点pb1目视到的可目视点。
[0116]
因此,飞行体600的控制部692执行将n个候选路径中的未关注候选路径之一作为关注路径的处理。接下来,控制部692在关注路径中所含的多个通过点中,根据用维度、经度、及高度表示通过点的位置的信息、与用维度、经度、及高度表示第1观察空域ab1具有的多个顶点的信息,指定出第1观察空域ab1中所含的多个通过点。其后,控制部692执行将第1观察空域ab1中所含的多个通过点中未关注的通过点之一作为关注通过点的处理。
[0117]
其后,飞行体600的控制部692根据第1观察点pb1的维度、经度、及高度、与关注通过点的维度、经度、及高度,算出从第1观察点pb1至关注通过点为止的线段的方程式。其后,控制部692根据第1地域的地图信息中所含的表示建造物及自然物分别具有的多个顶点的维度、经度、及高度的信息、与所算出的线段的方程式,判断是否存在与从第1观察点pb1至关注通过点为止的线段相交的建造物或自然物。
[0118]
飞行体600的控制部692当判断出存在与线段相交的建造物或自然物时,由于存在妨碍从第1观察点pb1目视关注通过点的建造物或自然物,因此指定出关注通过点为第1观察点pb1的不可目视点。相对于此,控制部692当判断出不存在与线段相交的建造物或自然
物时,指定出关注通过点为第1观察点pb1的可目视点。
[0119]
其后,飞行体600的控制部692从将未关注的通过点之一作为关注通过点的处理起重复上述处理,直至关注了关注路径中所含的多个通过点中的全部通过点为止。接下来,控制部692当关注了关注路径中所含的多个通过点中的全部通过点时,从将未关注的候选路径之一作为关注路径的处理起重复上述处理,直至关注了n个候选路径中的全部候选路径。
[0120]
指定出第1观察点pb1的可目视点与不可目视点之后,飞行体600的控制部692在n个候选路径中所含的多个通过点中,指定出包含在第2观察空域ab2中、且无法从第2观察点pb2目视的不可目视点。此外,控制部692在n个候选路径中所含的多个通过点中,指定出包含在第2观察空域ab2中、且可从第2观察点pb2目视的可目视点(步骤s24)。
[0121]
其后,飞行体600的控制部692从步骤s22中决定的n个候选路径中,除去第1观察空域ab1中所含的全部通过点为第1观察点pb1的不可目视点的路径、与第2观察空域ab2中所含的全部通过点为第2观察点pb2的不可目视点的路径。由此,控制部692将候选路径限定为可目视路径,在该可目视路径上,第1观察空域ab1中所含的通过点的至少一个为第1观察点pb1的可目视点,且第2观察空域ab2中所含的通过点的至少一个为第2观察点pb2的可目视点(步骤s25)。
[0122]
接下来,飞行体600的控制部692对限定为可目视路径的多个候选路径的各者,算出通过点的总数与可目视点的总数,并算出可目视点的总数在算出的通过点的总数中所占的比率(以下,称为可目视比率)。
[0123]
其后,飞行体600的控制部692根据算出的可目视比率,从多个候选路径中选择1个候选路径,并将选择的候选路径决定为飞行路径(步骤s26)。本实施例中,控制部692,将算出的可目视比率最高的候选路径决定为飞行路径,但并不限定于此。其后,控制部692结束执行飞行路径决定处理。
[0124]
决定飞行路径后,飞行体600的控制部692为了使飞行体600从营业场所bo起飞而生成用以使螺旋桨631至634旋转的控制信号并输出至驱动电路(图6的步骤s05)。本实施例中,列举飞行体600在时刻t1从营业场所bo起飞的情况为具体例进行以下说明。
[0125]
从营业场所bo起飞后,飞行体600的控制部692根据图10的步骤s21中获取的表示飞行体600的位置的信息、与图8所示的终端表格中保存的表示第1观察空域ab1的范围的信息及表示第2观察空域ab2的范围的信息,指定出飞行体600在第1观察空域ab1中飞行(步骤s06)。飞行体600刚一从营业场所bo起飞,就指定出飞行体600在第1观察空域ab1中飞行的原因在于,本实施例中如图2所示将包含营业场所bo的上空的空域预先设定为第1观察空域ab1。
[0126]
接下来,飞行体600的获取部691从图8所示的终端表格中,获取与表示第1观察空域ab1的范围的信息建立对应的表示第1观察点pb1的位置的信息。由此,获取部691指定出在第1设定点即第1观察点pb1观察飞行体600(步骤s07)。
[0127]
接下来,飞行体600的控制部692执行图11所示的方向变更控制处理,以使预先设定的颜色的第1面pl1朝向步骤s03中预先设定的点中在步骤s07中指定出的第1设定点pb1(步骤s08)。本实施例中,为简化说明,将为了使第1面pl1朝向第1设定点即第1观察点pb1而执行的方向变更控制处理称为第1方向变更控制处理。
[0128]
当开始执行第1方向变更控制处理时,飞行体600的控制部692根据用维度、经度、
及高度表示第1观察点pb1的位置的信息、与用维度、经度、及高度表示飞行体600的位置的信息,算出从飞行体600朝向第1观察点pb1的向量(步骤s31)。接下来,控制部692根据算出的向量,算出该向量与基准方位所成的方位角θ'(步骤s32)。
[0129]
其后,飞行体600的获取部691根据从方位角传感器617a输出的信号,获取表示飞行体600的前方向与基准方位所成的方位角θ的信息(步骤s33)。
[0130]
接下来,飞行体600的控制部692判断飞行体600的前方向的方位角θ与朝向第1观察点pb1的向量的方位角θ'是否一致(步骤s34)。此时,控制部692当判断出方位角θ与方位角θ'不一致时(步骤s34;否),从信息存储部699读出表示预先设定的角度δθ的信息。接下来,控制部692生成控制信号,该控制信号用以在使飞行体600飞行的同时,使方位角θ与方位角θ'的差异减少由读出的信息表示的角度δθ。
[0131]
因此,飞行体600的控制部692判断飞行体600的前方向的方位角θ是否大于从飞行体600朝向第1观察点pb1的向量的方位角θ'。控制部692当判断出前方向的方位角θ大于向量的方位角θ'时生成控制信号,该控制信号用以在使飞行体600飞行的同时,使飞行体600在水平面上顺时针旋转角度δθ。使飞行体600顺时针旋转的原因在于,本实施例中是从基准方位逆时针测量方位角θ及θ'。
[0132]
相对于此,飞行体600的控制部692当判断出前方向的方位角θ小于向量的方位角θ'时生成控制信号,该控制信号用以在使飞行体600飞行的同时,使飞行体600在水平面上逆时针旋转角度δθ。
[0133]
其后,飞行体600的控制部692将生成的控制信号输出至驱动电路619后(步骤s35),从步骤s33起重复上述处理。
[0134]
步骤s34中,飞行体600的控制部692当判断出方位角θ与方位角θ'一致时(步骤s34;是),算出从飞行体600朝向第1观察点pb1的向量与水平面所成的最小的俯角φ'(步骤s36)。
[0135]
其后,飞行体600的获取部691根据从姿态传感器617b输出的信号,获取表示飞行体600的前方向与水平面所成的最小的俯角φ的信息(步骤s37)。
[0136]
接下来,飞行体600的控制部692判断飞行体600的前方向的俯角φ与朝向第1观察点pb1的向量的俯角φ'是否一致(步骤s38)。此时,控制部692当判断出前方向的俯角φ与向量的俯角φ'不一致时(步骤s38;否),从信息存储部699读出表示预先设定的角度δφ的信息。接下来,控制部692生成控制信号,该控制信号用以在使飞行体600飞行的同时,使俯角φ与俯角φ'的差异减少预先设定的角度δφ。
[0137]
因此,飞行体600的控制部692判断飞行体600的前方向的俯角φ是否大于朝向第1观察点pb1的向量的俯角φ'。控制部692当判断出前方向的俯角φ大于向量的俯角φ'时生成控制信号,该控制信号用以在使飞行体600飞行的同时,使俯角φ减少角度δφ。相对于此,控制部692当判断出前方向的俯角φ小于向量的俯角φ'时生成控制信号,该控制信号用以在使飞行体600飞行的同时,使俯角φ增加角度δφ。
[0138]
接下来,飞行体600的控制部692将生成的控制信号输出至驱动电路619后(步骤s39),从步骤s37起重复上述处理。
[0139]
步骤s38中,飞行体600的控制部692当判断出俯角φ与俯角φ'一致时(步骤s38;是),结束执行方向变更控制处理。
[0140]
当通过在图6的步骤s08中执行方向变更控制处理而使得预先设定的颜色的第1面pl1朝向第1观察点pb1时,生成通知第1面pl1已朝向设定为第1观察点pb1的第1终端装置800的位置的第1对向通知。接下来,控制部692将生成的第1对向通知以第1终端装置800为接收地输出至数据通信电路614a,由此执行使第1对向通知发送至第1终端装置800的第1通知控制处理(步骤s09)。
[0141]
接下来,飞行体600的控制部692根据用维度、经度、及高度表示飞行体600的位置的信息、与用维度、经度、及高度表示飞行路径中所含的1个或多个未通过的通过点中通过顺序最早的通过点的位置的信息,生成用以进行使飞行体600的位置与通过顺序最早的通过点的位置的距离缩小的飞行的控制信号。其后,控制部692将所生成的控制信号输出至驱动电路619,由此执行使飞行体600顺行飞行过飞行路径的顺行飞行控制处理(步骤s10)。
[0142]
接下来,飞行体600的获取部691执行与图10的步骤s21相同的处理,因此获取表示飞行体600的位置的信息(步骤s11)。
[0143]
其后,飞行体600的控制部692判断数据通信电路614a是否从控制装置100接收到着陆命令(步骤s12)。
[0144]
本实施例中,列举如下情况为具体例进行以下的明,即,由于第1观察者未发现飞行体600异常,因此不向操纵员报告飞行体600异常,操纵员不对控制装置100进行发送着陆命令的操作。
[0145]
步骤s12中,飞行体600的控制部692当判断出未接收到着陆命令时(步骤s12;否),根据用维度、经度、及高度表示飞行体600的位置的信息、与用维度、经度、及高度表示移动目的地ad的位置的信息,算出从飞行体600的位置至移动目的地ad的位置的距离。接下来,控制部692根据算出的距离是否为预先设定的距离以下,而判断是否到达移动目的地ad(步骤s15)。
[0146]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t1后的时刻t2,飞行体600在向移动目的地飞行于第1观察空域ab1的同时,执行步骤s15的处理。
[0147]
时刻t2中,飞行体600的控制部692因算出的距离长于预先设定的距离,由此判断为飞行体600未到达移动目的地(步骤s15;否),从步骤s06起重复上述处理。
[0148]
接下来,飞行体600的控制部692指定出飞行体600在第1观察空域ab1中飞行、及在第1观察点pb1进行观察(步骤s06及s07)。
[0149]
其后,飞行体600的控制部692再次执行使预先设定的颜色的第1面pl1朝向第1观察点pb1的第1方向变更控制处理(步骤s08)。再次执行第1方向变更控制处理的原因在于,通过上次在时刻t1执行第1方向变更控制处理而朝向第1观察点pb1的第1面pl1,因飞行体600在时刻t1至t2的飞行而朝向与朝向第1观察点pb1的方向不同的方向。
[0150]
再次执行第1方向变更控制处理后,执行步骤s09至s12的处理,由此飞行体600将第1对向通知发送至第1终端装置800,顺行飞行于飞行路径,并获取表示飞行体600的位置的信息。
[0151]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t2至时刻t3的期间,第1观察者未发现飞行体600异常,因此不发送着陆命令。此外,本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t2后的时刻,飞行体600进入第2观察空域ab2,在其后的时刻t3,在向着移动目的地ad飞行于第2观察空域ab2的同时,再次执行步骤s15的处理。
[0152]
因此,在时刻t3,飞行体600的控制部692在判断出未接收到着陆命令后(步骤s12;否),判定出未到达移动目的地(步骤s15;否),从步骤s06起重复上述处理。接下来,飞行体600的控制部692指定出飞行体600在第2观察空域ab2中飞行、及在第2观察点pb2进行观察(步骤s06及s07)。
[0153]
其后,飞行体600的控制部692执行图11的方向变更控制处理以使预先设定的颜色的第1面pl1朝向第2观察点pb2(步骤s08)。本实施例中,为简化说明,将为使第1面pl1朝向第2设定点即第2观察点pb2而执行的方向变更控制处理称为第2方向变更控制处理。
[0154]
当开始执行第2方向变更控制处理时,飞行体600的控制部692根据用维度、经度、及高度表示第2观察点pb2的位置的信息与用维度、经度、及高度表示飞行体600的位置的信息,算出从飞行体600朝向第2观察点pb2的向量(步骤s31)。其后,飞行体600的控制部692执行步骤s32至s39的处理,由此根据算出的向量,使预先设定的颜色的第1面pl1朝向第2观察点pb2(步骤s32至s39)后,结束执行第2方向变更控制处理。
[0155]
其后,飞行体600的控制部692生成通知预先设定的颜色的第1面pl1已朝向设定在第2终端装置900的位置的第2观察点pb2的第2对向通知。接下来,控制部692将生成的第2对向通知以第2终端装置900为接收地输出至数据通信电路614a。由此,控制部692进行第2通知控制处理,该第2通知控制处理是使数据通信电路614a向第2终端装置900发送第2对向通知(步骤s09)。
[0156]
本实施例中,为简化说明,将第1对向通知与第2对向通知统称为对向通知,将第1通知控制处理与第2通知控制处理统称为通知控制处理。
[0157]
接下来,执行步骤s10及s11的处理,由此飞行体600顺行飞行于飞行路径,并获取表示飞行体600的位置的信息(步骤s10及s11)。
[0158]
其后,飞行体600的控制部692判断数据通信电路614a是否从控制装置100接收到着陆命令(步骤s12)。
[0159]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t3,第2观察者发现飞行体600异常并将飞行体600的异常报告给操纵员,因此操纵员对控制装置100进行发送着陆命令的操作。
[0160]
步骤s12中,飞行体600的控制部692判断出接收到着陆命令(步骤s12;是)。接下来,飞行体600的获取部691从信息存储部699存储的未图示的着陆场所表格中,获取表示作为候选着陆场所的场所的位置的多个信息。接下来,飞行体600的控制部692在由获取的信息表示位置的多个场所中,将距步骤s11中获取的信息所表示的飞行体600的位置最近的场所pd决定为使飞行体600着陆的着陆场所。其后,控制部692将飞行体600的移动目的地变更为所决定的着陆场所pd(步骤s13)。本实施例中,列举如下情况为具体例进行以下说明,即,所决定的着陆场所pd包含在飞行体600飞行的第2观察空域ab2的正下方的第2区域中。
[0161]
在步骤s13中变更移动目的地之后,执行图10所示的飞行路径决定处理,以将飞行体600的飞行路径决定为从飞行体600的位置到达变更后的移动目的地、且通过可从第2观察点pb2目视的点的路径(步骤s14)。
[0162]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t3后的时刻t4,飞行体600在向着变更为着陆场所pd的移动目的地飞行于第2观察空域ab2中的同时,再次执行步骤s15的处理。
[0163]
在时刻t4,飞行体600的控制部692判断出未到达移动目的地(步骤s15;否),从步骤s06起重复上述处理。接下来,控制部692执行步骤s06至s12的处理(步骤s06s12)。由此,飞行体600使预先设定的颜色的第1面pl1朝向第2观察点pb2顺行飞行过通向着陆场所pd的飞行路径,并将通知第1面pl1已朝向第2观察点pb2的第2对向通知发送至位于第2观察点pb2的第2终端装置900。
[0164]
接下来,飞行体600的控制部692在判断出未接收到着陆命令之后(步骤s12;否),当判断出已到达作为移动目的地的着陆场所pd时(步骤s15;是),生成用以使飞行体600着陆的控制信号并输出至驱动电路619(步骤s16)。其后,控制部692结束执行飞行控制处理。
[0165]
由观察飞行体600的第1观察者携带的第1终端装置800例如为智能手机,具备图12所示的cpu801、ram802、rom803a、闪速存储器803b、数据通信电路804a、显卡805a、显示装置805b、输入装置805c、位置测量电路806、扬声器809a、及麦克风809b。
[0166]
第1终端装置800具备的cpu801、ram802、rom803a、数据通信电路804a、显卡805a、显示装置805b、输入装置805c、扬声器809a、及麦克风809b的构成及功能,与图3所示的控制装置100具备的cpu101、ram102、rom103a、数据通信电路104a、显卡105a、显示装置105b、输入装置105c、扬声器109a、及麦克风109b的构成及功能相同。本实施例中,说明了第1终端装置800具备1个cpu801,但并不限定于此,也可具备多个cpu。此外,第1终端装置800也可具备多个ram或多个硬盘。
[0167]
第1终端装置800具备的闪速存储器803b及位置测量电路806的构成及功能,分别与图5所示的飞行体600具备的闪速存储器613b及位置测量电路616的构成及功能相同。
[0168]
第1观察者对第1终端装置800的输入装置805c进行执行第1终端装置800的闪速存储器803b预先存储的通话用的应用程序的操作。当输入装置805c输出与该操作对应的信号时,第1终端装置800的cpu801开始执行通话用的应用程序。
[0169]
从携带第1终端装置800的第1观察者接收到报告的操纵员,对控制装置100的输入装置105c进行执行控制装置100的硬盘103b预先存储的通话用的应用程序的操作。当输入装置105c输出与该操作对应的信号时,控制装置100的cpu101开始执行通话用的应用程序。
[0170]
第1观察者当目视到飞行体600从营业场所bo起飞进入第1观察空域ab1时,开始观察飞行体600,并在预先规定的时序或随机时序口述观察结果。第1终端装置800的麦克风809b将第1观察者的声音转换为电信号并输入至cpu801,cpu801根据输入的信号而生成表示第1观察者的声音的声音信息,并将生成的声音信息以控制装置100为接收地输出至数据通信电路804a。
[0171]
控制装置100的数据通信电路104a当接收到声音信息时,根据声音信息而生成表示第1观察者的声音的信号,并将生成的信号输出至扬声器109a。控制装置100的扬声器109a根据输出的信号而输出声音,操作控制装置100的操纵员对输出的声音进行确认。
[0172]
操纵员当在从扬声器109a输出的声音中确认到飞行体600有异常时,对控制装置100的输入装置105c进行用以使飞行体600着陆的操作。当控制装置100的输入装置105c输入与该操作对应的信号时,控制装置100的cpu101将着陆命令以飞行体600为接收地输出至数据通信电路104a。相对于此,操纵员当确认飞行体600无异常时,不进行用于着陆的操作。
[0173]
当第1终端装置800的数据通信电路804a接收到从飞行于第1观察空域ab1中的飞行体600发送的第1对向通知时,第1终端装置800的cpu801读出表示闪速存储器803b预先存
储的通知音的信息。接下来,cpu801根据读出的信息而将信号输出至扬声器809a,扬声器809a根据输出的信号而输出通知音。
[0174]
第2终端装置900的构成及功能与第1终端装置800的构成及功能相同。
[0175]
根据所述构成,在空间中飞行的飞行体600具备:获取部691,获取表示飞行体600的位置的信息;及控制部692,根据获取的信息,进行使飞行体600具备的面、且为预先设定的颜色的面的第1面pl1朝向预先设定的点即第1观察点pb1的方向变更控制处理。因此,飞行体600可提高从预先设定的点即第1观察点pb1视辩飞行体600的视辨性。此外,控制部692由于也进行使第1面pl1朝向第2观察点pb2的方向变更控制处理,因此也可提高从第2观察点pb2视辩飞行体600的视辨性。
[0176]
根据所述构成,预先设定的点为第1观察者观察飞行体600的位置上的第1观察点pb1。因此,如果第1观察者在第1观察点pb1观察飞行体600,则第1观察者根据预先设定的颜色而可容易地视辩出飞行体600。此外,预先设定的点也为第2观察点pb2,因此第2观察者也可容易地视辩出飞行体600。
[0177]
此外,由于预先设定的颜色为警戒色,因此第1观察者及第2观察者可根据警戒色而发现飞行体600。进而,由于预先设定的颜色为飞行体600所处环境的颜色的补色,在飞行体600所处环境的颜色的衬托下更为显眼,因此着色成预先设定的颜色的第1面pl1的视辨性提高。
[0178]
飞行体600的信息存储部699是将表示预先规定的第1地域的范围的信息、与记载处在预先规定的第1地域中的建造物及自然物的位置及形状的地图信息建立对应而加以存储。此外,飞行体600的获取部691从信息存储部699获取与如下信息建立对应的地图信息,该信息表示包含预先设定的点即第1观察点pb1的第1地域的范围。进而,飞行体600的控制部692根据获取的地图信息,将飞行体600的飞行路径决定为通过如下通过点的路径,且进行使飞行体飞行过所决定的飞行路径的顺行飞行控制处理,所述通过点不同于在与预先设定的点即第1观察点pb1之间存在建造物或自然物的通过点。因此,飞行体600可提高从第1观察点pb1视辩飞行体600的视辨性。
[0179]
飞行体600的信息存储部699是将表示第2地域的范围的信息与第2地域的地图信息建立对应而加以存储,获取部691获取与如下信息建立对应的地图信息,该信息表示包含第2观察点pb2的第2地域的范围。此外,控制部692根据获取的地图信息而将飞行路径决定为通过如下通过点的路径,该通过点不同于在与第2观察点pb2之间存在建造物或自然物的通过点。因此,飞行体600可提高从第2观察点pb2视辩飞行体600的视辨性。
[0180]
根据所述构成,飞行体600还具备数据通信电路614a,该数据通信电路614a接收表示包含第1终端装置800及第2终端装置900的终端装置的位置的信息。此外,飞行体600的控制部692将接收到的信息所表示的终端装置的位置的点通过设定为第1面pl1所朝向的点而设为预先设定的点。进而,飞行体600的控制部692进行使预先设定的颜色的第1面pl1朝向预先设定的点的方向变更控制处理后,进行使数据通信电路614a将通知第1面pl1已朝向终端装置的位置的对向通知发送至该终端装置的通知控制处理。因此,飞行体600可提高从终端装置的位置视辩飞行体600的视辨性,并且可通知飞行体600的状态为预先设定的颜色的第1面pl1朝向终端装置的视辨性较高的状态。即,如果第1观察者携带有第1终端装置800,则飞行体600可提高从第1观察者所处的第1观察点pb1视辩飞行体600的视辨性,并且可对
第1观察者通知预先设定的颜色的第1面pl1已朝向第1终端装置800。第1观察者通过在通知的时序搜寻预先设定的颜色的第1面pl1,可比以往更容易发现飞行体600。相同地,如果第2观察者携带有第2终端装置900,则飞行体600可提高从第2观察点pb2视辩飞行体600的视辨性,并且可对第2观察者通知第1面pl1已朝向第2终端装置900。
[0181]
<实施例1的变化例1>
[0182]
实施例1中,列举在时刻t3观察到飞行体600异常的情况为具体例进行说明,但本变化例中,列举未观察到飞行体600异常的情况为具体例进行说明。
[0183]
本变化例中,当开始执行图6所示的飞行控制处理时,执行步骤s01至s05的处理(步骤s01至s05)。由此,飞行体600在决定了图2所示的从营业场所bo到达物品的配送目的地ad的飞行路径后,在时刻t1从营业场所bo起飞。
[0184]
接下来,执行步骤s06至s14的处理(步骤s06至s14)。由此,飞行体600使预先设定的颜色的第1面pl1朝向预先设定的点即第1观察点pb1而飞行于飞行路径。
[0185]
本变化例中,由于未观察到飞行体600异常而不向飞行体600发送着陆命令,因此飞行体600判断出未接收到着陆命令,维持移动目的地为配送目的地ad。
[0186]
其后,在时刻t2,飞行体600判断出未到达移动目的地(步骤s15;否),再次执行步骤s06至s15的处理(步骤s06至s15)。由此,飞行体600使第1面pl1朝向第1观察点pb1而继续飞行于飞行路径中。
[0187]
此外,在时刻t3及t4,分别执行步骤s06至s15的处理后(步骤s06至s15),飞行体600使第1面pl1朝向第2观察点pb2继续飞行于飞行路径中。
[0188]
接下来,飞行体600重复步骤s06至s14的处理后(步骤s06至s14),判断出到达作为移动目的地的配送目的地ad(步骤s15;是)。其后,飞行体600的控制部692生成用以着陆于配送目的地ad的控制信号并输出至驱动电路。由此,飞行体600在着陆到配送目的地ad后(步骤s16),结束执行飞行控制处理。
[0189]
接下来,飞行体600的控制部692将用以使第1围持架651a与第2围持架651b向相互远离的方向移动的控制信号输出至驱动电路619。由此,控制部692使第1围持架651a及第2围持架651b释放物品。
[0190]
其后,飞行体600的cpu611以移动目的地为营业场所bo执行图6所示的飞行控制处理。由此,飞行体600返回营业场所bo。
[0191]
<实施例1的变化例2>
[0192]
实施例1中,说明了飞行体600在飞行于第1观察空域ab1中时,执行使预先设定的颜色的第1面pl1朝向第1观察点pb1的第1方向变更控制处理。
[0193]
然而,并不限定于此,本变化例的飞行体600当在第1观察空域ab1中飞行、且与第1观察点pb1的距离为预先设定的距离l以下时,执行使第1面pl1朝向第1观察点pb1的第1方向变更控制处理。
[0194]
因此,本变化例的飞行体600的控制部692在图6的步骤s07中指定出在第1观察点pb1进行观察之后,读出信息存储部699预先存储的表示距离l的信息。接下来,控制部692根据步骤s07中获取的表示第1观察点pb1的位置的信息、与步骤s11或图10的步骤s21中获取的表示飞行体600的位置的信息,算出飞行体600至第1观察点pb1的距离。
[0195]
其后,飞行体600的控制部692当判断出算出的距离为读出的信息所表示的距离l
以下时,从执行使预先设定的颜色的第1面pl1朝向第1观察点pb1的第1方向变更控制处理的步骤s08继续执行飞行控制处理。相对于此,控制部692当判断出算出的距离长于距离l时,从步骤s10继续执行飞行控制处理,由此不执行第1方向变更控制处理及第1通知控制处理。
[0196]
相同地,本变化例的飞行体600当判断出在第2观察空域ab2中飞行、且与第2观察点pb2的距离为预先设定的距离l以下时,执行使第1面pl1朝向第2观察点pb2的第2方向变更控制处理及第2通知控制处理。相对于此,飞行体600当判断出在第2观察空域ab2中飞行、且与第2观察点pb2的距离长于预先设定的距离l时,不执行第2方向变更控制处理及第2通知控制处理。
[0197]
本变化例中,说明了飞行体600当在第1观察空域ab1中飞行、且飞行体600与第1观察点pb1的距离为距离l以下时,执行第1方向变更控制处理及第1通知控制处理,且当在第2观察空域ab2中飞行、且飞行体600与第2观察点pb2的距离为距离l以下时,执行第2方向变更控制处理及第2通知控制处理。
[0198]
然而,并不限定于此,飞行体600当在第1观察空域ab1中飞行、且飞行体600与第1观察点pb1的距离为距离l以下时,执行第1方向变更控制处理及第1通知控制处理,且当在第2观察空域ab2中飞行时,也可不管飞行体600与第2观察点pb2的距离如何,均执行第2方向变更控制处理及第2通知控制处理。
[0199]
此外,并不限定于此,飞行体600当在第1观察空域ab1中飞行时,也可不管飞行体600与第1观察点pb1的距离如何,均执行第1方向变更控制处理及第1通知控制处理,且当在第2观察空域ab2中飞行、且飞行体600与第2观察点pb2的距离为距离l以下时,也执行第2变更控制处理及第2通知控制处理。
[0200]
此外,并不限定于此,飞行体600也可不管是在第1观察空域ab1中飞行,还是在第2观察空域ab2中飞行,当飞行体600与第1观察点pb1的距离为距离l以下,且第1观察点pb1比第2观察点pb2更靠近飞行体600时,均执行第1方向变更控制处理及第1通知控制处理,且当飞行体600与第2观察点pb2的距离为距离l以下,且第2观察点pb2比第1观察点pb1更靠近飞行体600时,均执行第2变更控制处理及第2通知控制处理。
[0201]
<实施例1的变化例3>
[0202]
实施例1中,说明了由于飞行体600在褐色砖造的房屋林立的街道中飞行,所以飞行体600的背景颜色为褐色,但并不限定于此。飞行体600的背景颜色例如可为第1观察者、第2观察者、以及与第1观察者及第2观察者不同的观察者的任1人以上过去观察的飞行体600的背景颜色中观察频率最高的颜色,或也可为从以预先规定的频率以上的频率观察的1种或多种颜色中按预先规定的规则或随机选择的颜色。
[0203]
此外,实施例1中,说明了飞行体600的螺旋桨护罩641的第1面pl1被着色为飞行体600的背景颜色的补色,但并不限定于此。在飞行体600的背景颜色为非彩色的情况下,也可将第1面pl1着色为预先设定的有彩色或非彩色。例如,如果飞行体600的背景颜色为白色,则也可将第1面pl1着色为预先设定的作为有彩色的红色、或预先设定的作为非彩色的黑色。此外,例如也可将第1面pl1预先着色为与背景的非彩色的亮度相差预先设定的值以上的亮度的非彩色。
[0204]
<实施例1的变化例4>
[0205]
实施例1中,说明了在飞行体600的螺旋桨护罩641至644具有的多个宽幅面中,仅将螺旋桨护罩641的第1面pl1着色为预先设定的颜色,但并不限定于此。
[0206]
着色为预先设定的颜色的面,例如也可为螺旋桨护罩641具有的多个面中与宽幅面不同的面。
[0207]
此外,例如,也可将螺旋桨护罩642至644中任一者具有的2个宽幅面中飞行体600的外侧的宽幅面着色为预先设定的颜色。
[0208]
进而,例如也可将螺旋桨护罩641至644中的2个以上螺旋桨护罩分别具有的2个宽幅面中飞行体600的外侧的宽幅面着色为预先设定的颜色。此外,飞行体600的控制部692也可执行使着色为预先设定的颜色的2个以上的宽幅面中的1个宽幅面朝向第1观察点pb1或第2观察点pb2的方向变更控制处理。
[0209]
此外,例如也可将飞行体600的机体具有的面中的1个以上的面着色为预先设定的颜色。着色为预先设定的颜色的面例如也可为机体的前表面、后表面、侧面、上表面、或下表面。此外,飞行体600的机体具有的面也可包含飞行体600的控制装置610具有的面。
[0210]
<实施例1的变化例5>
[0211]
实施例1中,说明了预先设定的颜色的第1面pl1朝向飞行体600的前方向是指,第1面pl1的法线方向与飞行体600的前方向平行,且第1面pl1比与第1面pl1不同的螺旋桨护罩641的宽幅面位于更前侧。此外,说明了飞行体600的控制部692通过使方位角θ与方位角θ'一致,且使俯角φ与俯角φ'一致,而使朝向飞行体600的前方向的预先设定的颜色的第1面pl1朝向第1观察点pb1或第2观察点pb2。方位角θ是飞行体600的前方向与基准方位所处的方位角,方位角θ'是从飞行体600朝向第1观察点pb1或第2观察点pb2的向量与基准方位所成的方位角。此外,俯角φ是飞行体600的前方向与水平面所成的最小俯角,且俯角φ'是该向量与水平面所成的最小俯角。
[0212]
然而,并不限定于此,飞行体600的控制部692也可通过使飞行体600的前方向的方位角θ与该向量的方位角θ'一致,且使飞行体600的前方向与水平面所成的最小仰角和该向量与水平面所成的最小仰角一致,而使第1面pl1朝向第1观察点pb1或第2观察点pb2。
[0213]
此外,并不限定于此,第1面pl1朝向飞行体600的前方向也可是指,第1面pl1的法线方向与基准方位所成的方位角,和飞行体600的前方向与基准方位所成的方位角θ一致,且第1面pl1比与第1面pl1不同的螺旋桨护罩641的宽幅面位于更前侧。即,飞行体600的前方向与水平面所成的最小仰角或俯角,和第1面pl1的法线方向与水平面所成的最小仰角或俯角可一致,也可不一致。此外,飞行体600的控制部692也可不管飞行体600的前方向的仰角或俯角φ是否与从飞行体600朝向第1观察点pb1或第2观察点pb2的向量的仰角或俯角φ'一致,均通过使飞行体600的前方向与基准方位所成的方位角θ,和该向量与基准方位所成的方位角θ'一致,而使第1面pl1朝向第1观察点pb1或第2观察点pb2。
[0214]
<实施例1的变化例6>
[0215]
实施例1的说明所使用的图2中,将第1观察点pb1及第2观察点pb2图示为与营业场所bo及配送目的地ad不同的点,但并不限定于此。第1观察点pb1或第2观察点pb2也可为与营业场所bo或配送目的地ad相同的点。
[0216]
<实施例1的变化例7>
[0217]
实施例1中,说明了飞行系统1具备2个终端装置即第1终端装置800与第2终端装置
900,由分别携带第1终端装置800与第2终端装置900的2个观察者在2处点即第1观察点pb1及第2观察点pb2观察飞行体600。
[0218]
然而,并不限定于此,飞行系统1也可具备1个第1终端装置800,且由携带第1终端装置800的1个观察者在1处第1观察点pb1观察飞行体600。此外,飞行系统1也可具备n个终端装置(其中,n为3以上的整数),由分别携带终端装置的n个观察者在n处观察点观察飞行体600。
[0219]
<实施例1的变化例8>
[0220]
实施例1中,列举了飞行体600冒烟来作为飞行体600异常的具体例,但飞行体600的异常并不限定于此。飞行体600的异常包含例如图4所示的螺旋桨631至634中任一者以上未在比预先设定的时间长的时间内旋转。此外,飞行体600的异常包含例如螺旋桨631至634中任一者以上在比预先设定的时间长的时间内,进行少于预先设定的每单位时间的转速的旋转。进而,飞行体600的异常包含例如飞行体600着火。
[0221]
<实施例1的变化例9>
[0222]
实施例1中,说明了不禁止飞行体600着陆的场所包含例如道路、河滩、或公园等场所,但并不限定于此。不禁止飞行体600着陆的场所包含例如第1观察点pb1或第2观察点pb2。此外,不禁止飞行体600着陆的场所也可为例如山地、丘陵地、校园、或允许飞行体600着陆的航空站。
[0223]
航空站也可为集体住宅、办公大楼、酒店、或公共设施的入口、或独栋房屋的大门口。此外,航空站也可为集体住宅、办公大楼、酒店、或公共设施的大厅。进而,航空站也可为独栋房屋、集体住宅、办公大楼、酒店、或公共设施的庭院、屋顶、露台、或停车场。
[0224]
<实施例1的变化例10>
[0225]
实施例1中,说明了配送地域中的建造物包含例如房屋、大楼、教会、及桥,配送地域中的自然物包含例如树木及岩石,但并不限定于此。配送地域中的建造物还包含例如寺院、城、竞技场、铜像、石像、人行天桥、标识、信号机、电线杆、电线、路灯、广告牌、墙壁、塔、及游览车的至少一者。此外,自然物还包含冰山、及冰柱的至少一者。
[0226]
<实施例1的变化例11>
[0227]
实施例1中,说明了在图9所示的地图表格中,包含与表示第1地域的范围的信息建立对应而保存的地图信息、表示第1地域中的建造物的位置及形状的信息、及表示第1地域中的自然物的位置及形状的信息。
[0228]
然而,并不限定于此,本变化例的第1地域的地图信息仅包含表示第1地域中的建造物的位置及形状的信息。相同地,本变化例的第2地域的地图信息仅包含表示第2地域中的建造物的位置及形状的信息。
[0229]
此外,本变化例的飞行体600的控制部692根据第1地域的地图信息,在设为候选飞行路径的候选路径的通过点中,指定出在与第1观察点pb1之间存在建造物的第1观察点pb1的不可目视点、及不存在建造物的第1观察点pb1的可目视点。相同地,控制部692指定出在与第2观察点pb2之间存在建造物的第2观察点pb2的不可目视点、及不存在建造物的第2观察点pb2的可目视点。
[0230]
接下来,本变化例的飞行体600的控制部692将多个候选路径限定为可目视路径,在该可目视路径中,第1观察空域ab1中所含的通过点的至少一者为第1观察点pb1的可目视
点,且第2观察空域ab2中所含的通过点的至少一者为第2观察点pb2的可目视点。其后,控制部692从限定为可目视路径的多个候选路径中选择飞行路径。
[0231]
此外,并不限定于此,第1地域的地图信息也可包含表示第1地域中的自然物的位置及形状的信息,第2地域的地图信息也可包含表示第2地域中的自然物的位置及形状的信息。
[0232]
<实施例1的变化例12>
[0233]
实施例1中,说明了飞行体600的控制部692将多个候选路径限定为可目视路径,在该可目视路径中,第1观察空域ab1中所含的通过点的至少一者为第1观察点pb1的可目视点,且第2观察空域ab2中所含的通过点的至少一者为第2观察点pb2的可目视点。
[0234]
然而,并不限定于此,飞行体600的控制部692也可将多个候选路径限定为如下路径,在该路径中,第1观察空域ab1中所含的全部通过点为第1观察点pb1的可目视点,且第2观察空域ab2中所含的全部通过点为第2观察点pb2的可目视点。
[0235]
此外,并不限定于此,飞行体600的控制部692也可将多个候选路径限定为如下路径,在该路径上,第1观察空域ab1中所含的通过点与第2观察空域ab2中所含的通过点的至少一者为第1观察点pb1的可目视点或第2观察点pb2的可目视点。
[0236]
<实施例1的变化例13>
[0237]
实施例1中,说明了第1终端装置800及第2终端装置900为智能手机,但并不限定于此,也可为平板型的个人计算机、或笔记本型的个人计算机。
[0238]
实施例1中,说明了第1终端装置800当从飞行体600接收到第1对向通知时,会从扬声器809a输出通知声音,但并不限定于此,第1终端装置800也可显示通知图像。
[0239]
因此,当第1终端装置800的数据通信电路804a接收到第1对向通知时,第1终端装置800的cpu801读出闪速存储器803b预先存储的表示通知图像的信息。接下来,cpu801根据读出的信息而将信号输出至显卡805a,显示装置805b根据从显卡805a输出的信号而显示通知图像。
[0240]
此外,并不限定于此,第1终端装置800也可具备例如作为振动器的未图示的振动产生装置,当从飞行体600接收到第1对向通知时,利用振动产生装置产生振动。
[0241]
因此,当第1终端装置800的数据通信电路804a接收到第1对向通知时,第1终端装置800的cpu801输出使振动产生装置动作的信号。振动产生装置根据该信号来动作,在预先设定的时间内产生振动。
[0242]
<实施例1的变化例14>
[0243]
实施例1中,说明了飞行体600具备信息存储部699,但并不限定于此。本变化例的飞行体600不具备信息存储部699。本变化例的飞行体600经由因特网in与未图示的信息存储装置连接,该信息存储装置例如为nas(network attached storage,网络附加存储),且具有与信息存储部699的功能相同的功能。本变化例的飞行系统1可具备信息存储装置,也可不具备信息存储装置。
[0244]
本变化例的飞行体600的获取部691从信息存储装置存储的图9所示的地图表格中,获取与表示第1地域的范围的信息建立对应的地图信息、及与表示第2地域的范围的信息建立对应的地图信息。
[0245]
<实施例1的变化例15>
[0246]
实施例1中,说明了飞行体600为无人飞机,但并不限定于此,也可为无人飞翔体。此外,实施例1中,说明了飞行体600为通过图4所示的螺旋桨631至634获得升力及推力的无人机,但并不限定于此,飞行体600也可具备机翼,通过机翼获得升力,也可具备充满比重小于空气的气体的气囊,通过气囊获得升力。此外,飞行体600也可具备喷气发动机或火箭发动机,通过喷气发动机或火箭发动机获得推力。
[0247]
进而,飞行体600未必为无人,只要为除要由控制装置100控制以外能自主飞行的物体,则也可乘坐人。
[0248]
<实施例1的变化例16>
[0249]
实施例1中,说明了飞行体600的cpu611通过执行图6的飞行控制处理、图10的飞行路径决定处理、及图11的方向变更控制处理,而作为图7所示的获取部691、及控制部692发挥功能。此外,说明了飞行体600的闪速存储器613b作为存储图8的终端表格、图9的地图表格、及未图示的着陆场所表格及部分路径表格的信息存储部699发挥功能。
[0250]
然而,并不限定于此,图6的飞行控制处理、图10的飞行路径决定处理、及图11的方向变更控制处理,也可由飞行体600的cpu611、与图3所示的控制装置100具备的cpu101分散执行。因此,也可为飞行体600的cpu611不作为获取部691、及控制部692中的任一以上的功能部发挥功能,而控制装置100的cpu101作为该1个以上的功能部发挥功能。此外,也可为飞行体600的信息存储部699不存储终端表格、地图表格、着陆场所表格、及部分路径表格中的任一以上的表格,而控制装置100的硬盘103b作为储存该1个以上的表格的未图示的信息存储部发挥功能。
[0251]
<实施例2>
[0252]
实施例1中,说明了第1面pl1为螺旋桨护罩641具有的2个宽幅面中的一个宽幅面,但并不限定于此。本实施例中,第1面pl1为图5所示的飞行体600具备的显示装置615b的显示面。以下,对与实施例1相同的构成,使用与实施例1中所使用的符号相同的符号进行说明,但主要说明本实施例与实施例1的不同。
[0253]
本实施例的显示装置615b具有平面形状的显示面,且以作为该显示面的第1面pl1朝向飞行体600的前方向的方式设置于控制装置610的前表面。
[0254]
此外,在本实施例的控制装置610的上表面,设置有图13所示的半球型的摄像装置670。摄像装置670具备具有与飞行体600的上方向平行的轴的圆筒形状的壳体671。壳体671的一底面固定于控制装置610的上表面,壳体671的另一底面具有开口。此外,摄像装置670具备覆盖壳体671的开口的半球形状的透明罩672。
[0255]
在壳体671中内置有:旋转台673a,具有通过底面的中心,且与壳体671的轴平行的旋转轴at;及电动机673b,使旋转台673a旋转。在旋转台673a的上表面,固定有支撑作为数码相机的摄像单元674的支撑部件675b。支撑部件675b轴支撑从摄像单元674的两侧面向摄像单元674的外侧沿水平方向突出的突出部675a。在旋转台673a的上表面进而固定有电动机675c,该电动机675c通过使形成在摄像单元674的突出部675a上的齿轮旋转而使摄像单元674摆动。
[0256]
当电动机675c使摄像单元674摆动时,摄像单元674的透镜的光轴ao与控制装置610的上表面所成的最小仰角,变更为从光轴ao朝向飞行体600的前方向的0度至光轴ao朝向飞行体600的上方向的90度为止的角度。进而,当电动机673b使旋转台673a旋转时,在以
飞行体600的前方向为基准方位的情况下,与该基准方位所成的方位角沿逆时针在0度至360度的范围变更。
[0257]
本实施例的飞行体600的驱动电路619与未图示的缆线连接,该缆线分别连接于摄像装置670具备的电动机673b及电动机675c。驱动电路619根据cpu611输出的信号来使摄像装置670的电动机673b及电动机675c驱动,由此变更摄像装置670的光轴ao的方位角及仰角。
[0258]
本实施例的飞行体600的cpu611执行图14所示的飞行控制处理。当开始执行飞行控制处理时,cpu611执行与图6的步骤s01至s07相同的处理(步骤s41至s47)。由此,指定出观察飞行体600的第1观察点pb1或第2观察点pb2。
[0259]
接下来,根据从指定出的第1观察点pb1或第2观察点pb2的位置观察的飞行体600的背景颜色,执行图15所示的颜色设定处理,即,设定在作为显示面的第1面pl1上显示的图像的颜色(步骤s48)。
[0260]
当开始执行颜色设定处理时,飞行体600的控制部692通过执行与图11的步骤s31相同的处理,算出从飞行体600朝向步骤s47中指定出的第1观察点pb1或第2观察点pb2的图16所示的向量v。接下来,控制部692算出所算出的向量v的逆向量,并将算出的逆向量的起点变更为飞行体600的位置。由此,控制部692算出向量vr,该向量vr从飞行体600朝向与从飞行体600朝向第1观察点pb1或第2观察点pb2的方向相反的方向(步骤s61)。
[0261]
本实施例中,为简化说明,说明了第1观察点pb1或第2观察点pb2由于为第1区域或第2区域的地表面上的点,因此为比在第1观察空域ab1或第2观察空域ab2中飞行的飞行体600的位置低的位置。因此,飞行体600的控制部692算出图16所示的从飞行体600朝向飞行体600的上方向的向量vr。
[0262]
接下来,飞行体600的控制部692算出图16所示的水平面h与向量vr所成的最小的仰角φr(步骤s62)。此外,获取部691通过执行与图11的步骤s37相同的处理而获取表示最小的俯角φ的信息,该最小的俯角φ是水平面h与表示飞行体600的前方向的向量vf所成的俯角(步骤s63)。
[0263]
此处,表示飞行体600的前方向的向量vf与水平面h所成的最小的俯角φ,等于飞行体600具备的控制装置610的上表面u与水平面h所成的最小的俯角。因此,控制装置610的上表面u与向量vr所成的最小仰角是从仰角φr减去俯角φ而得的角度。
[0264]
其后,飞行体600的控制部692生成控制信号并将生成的控制信号输出至驱动电路619(步骤s64),该控制信号是使摄像装置670的光轴ao与控制装置610的上表面u所成的最小仰角,变更为从仰角φr减去俯角φ而得的角度。驱动电路619根据输出的控制信号使摄像装置670的电动机675c驱动,由此将摄像装置670的光轴ao与水平面h所成的最小仰角,变更为和向量vr与水平面h所成的最小的仰角φr相同的角度。
[0265]
接下来,飞行体600的控制部692算出基准方位与向量vr所成的方位角θr(步骤s65)。此外,获取部691通过执行与图11的步骤s33相同的处理,而获取表示基准方位与飞行体600的前方向所成的方位角θ的信息(步骤s66)。
[0266]
其后,飞行体600的控制部692将控制信号输出至驱动电路619(步骤s67),该控制信号供使飞行体600的前方向与摄像装置670的光轴ao所成的方位角变更为从方位角θr减去方位角θ而得的角度。驱动电路619根据输出的控制信号来使摄像装置670的电动机673b
驱动,由此将摄像装置670的光轴ao与基准方位所成的方位角,变更为和向量vr与基准方位所成的方位角θr相同的角度。
[0267]
其后,飞行体600的控制部692经由输入输出端口618将命令摄像的信号输出至可对向量vr所表示的方向进行拍摄的摄像装置670。向量vr表示的方向是从第1观察点pb1或第2观察点pb2朝向飞行体600的方向,因此摄像装置670对从第1观察点pb1或第2观察点pb2观察飞行体600时成为飞行体600的背景的环境进行拍摄。其后,获取部691经由输入输出端口618获取表示摄像装置670所生成的摄像图像的信号,并根据所获取的信号来获取表示摄像图像的信息(步骤s68)。
[0268]
接下来,飞行体600的控制部692根据获取的信息,并根据构成摄像图像的多个像素的像素值而指定出飞行体600的背景颜色。本实施例中,控制部692算出多个像素的像素值的平均值,并将算出的平均值所表示的颜色指定为背景颜色。
[0269]
其后,飞行体600的控制部692例如使用下述的式(1)至(4)来决定所指定的背景颜色的补色。
[0270]
s=max(r、g、b)+min(r、g、b)
···
(1)
[0271]
hr=s-r
···
(2)
[0272]
hg=s-g
···
(3)
[0273]
hb=s-b
···
(4)
[0274]
其中,r、g、及b分别表示背景颜色的r值、g值、及b值。此外,max(r、g、b)表示以r、g、及b为自变量在r、g、及b内返回最大值的函数。min(r、g、b)表示以r、g、及b为自变量在r、g、及b内返回最小值的函数。hr、hg、及hb分别表示背景颜色的补色的r值、g值、及b值。
[0275]
决定背景颜色的补色后,飞行体600的控制部692在将决定的补色设定为在作为显示面的第1面pl1上显示的图像的颜色后(步骤s69),结束执行颜色设定处理。
[0276]
在图14的步骤s48中执行颜色设定处理后,飞行体600的控制部692对显示装置615b进行使步骤s69中设定的补色的图像显示在第1面pl1上的显示控制处理(步骤s49)。
[0277]
其后,执行与图6的步骤s08至s16相同的处理后(步骤s50至s58),结束执行飞行控制处理。由此,飞行体600使显示有补色的图像的第1面pl1朝向第1观察点pb1或第2观察点pb2,沿飞行路径飞行至移动目的地后着陆于移动目的地。
[0278]
根据所述构成,第1面pl1为显示装置615b的显示面。此外,飞行体600还具备摄像装置670,该摄像装置670从飞行体600对与从飞行体600朝向预先设定的点即第1观察点pb1或第2观察点pb2的方向相反的方向进行拍摄而获得摄像图像。此外,飞行体600的控制部692将利用摄像装置670获得的摄像图像的颜色的补色通过设定为在第1面pl1上显示的图像的颜色而设为预先设定的颜色。进而,控制部692进行使预先设定的颜色的图像显示在第1面pl1上的显示控制处理。因此,即便从第1观察点pb1或第2观察点pb2观察飞行体600时所观察到的飞行体600的背景因飞行体600的飞行而发生变化,飞行体600也可在飞行体600的第1面pl1显示背景颜色的补色的图像。由此,飞行体600可持续提高从第1观察点pb1或第2观察点pb2视辩飞行体600的视辨性。
[0279]
<实施例2的变化例1>
[0280]
实施例2中,说明了第1观察点pb1或第2观察点pb2为第1区域或第2区域的地表面上的点,但并不限定于此。本变化例的第1观察点pb1或第2观察点pb2,例如为设置在第1区
域或第2区域中的大楼的楼顶等高度高于第1区域或第2区域的地表面的点。
[0281]
本变化例的飞行体600在飞行体600的控制装置610的上表面具备实施例2中所说明的摄像装置670,且在控制装置610的下表面具备具有与摄像装置670相同的构成及功能的未图示的摄像装置。
[0282]
本变化例的飞行体600的控制部692在图15的颜色设定处理中,当判断出第1观察点pb1或第2观察点pb2的高度为飞行体600的高度以下时,对上表面的摄像装置670输出用以对与从飞行体600向第1观察点pb1或第2观察点pb2的方向相反的方向进行拍摄的信号。相对于此,控制部692当判断出第1观察点pb1或第2观察点pb2的高度高于飞行体600的高度时,对下表面的摄像装置输出用以对与从飞行体600朝向第1观察点pb1或第2观察点pb2的方向相反的方向进行拍摄的信号。其后,控制部692将利用上表面的摄像装置670或下表面的摄像装置生成的摄像图像的补色设定为在第1面pl1上显示的图像的颜色。
[0283]
<实施例2的变化例2>
[0284]
实施例2中,说明了飞行体600的控制部692算出构成摄像图像的多个像素的像素值的平均值,并将算出的平均值所表示的颜色指定为背景颜色,但并不限定于此。控制部692例如也可在构成摄像图像的多个像素的像素值中,将摄像图像中使用最多的像素值的颜色指定为背景颜色。
[0285]
此外,实施例2中,说明了飞行体600的控制部692使用上述的式(1)至(4)决定背景颜色的补色,但并不限定于此。飞行体600的信息存储部699例如也可存储补色表格,该补色表格中,预先建立对应地保存有多个表示有彩色的像素值的信息与表示该有彩色的补色的像素值的信息。该情况下,控制部692也可在补色表格中,获取与表示根据摄像图像算出的背景颜色的像素值的信息建立对应的信息,并将获取的信息所表示的像素值的颜色决定为背景颜色的补色。
[0286]
<实施例2的变化例3>
[0287]
实施例2中,说明了飞行体600的控制部692使通过执行图14的步骤s48而设定的颜色的图像在步骤s49中显示在显示装置615b的显示面后,在步骤s50中使显示面朝向第1观察点pb1或第2观察点pb2。
[0288]
然而,并不限定于此,本变化例的飞行体600的控制部692使显示面朝向第1观察点pb1或第2观察点pb2后,设定显示在显示面上的图像的颜色,并使设定的颜色的图像显示在显示面上。
[0289]
因此,本变化例的显示装置615b以显示面朝向飞行体600的前方向的方式设置在飞行体600的控制装置610的前表面。此外,本变化例的摄像装置670不具有用以变更仰角及方位角的机构,以可对飞行体600的后方向进行拍摄的方式设定光轴ao及视角而设置于控制装置610的后表面。
[0290]
本变化例的飞行体600的控制部692通过执行方向变更控制处理,而使显示面朝向从飞行体600向第1观察点pb1或第2观察点pb2的方向,由此使摄像装置670朝向与从飞行体600向第1观察点pb1或第2观察点pb2的方向相反的方向。接下来,控制部692将命令摄像的信号输出至摄像装置670,将在显示面上显示的图像的颜色设定为利用摄像装置670生成的摄像图像的颜色的补色。其后,控制部692使设定的颜色的图像显示在显示面上。
[0291]
<实施例3>
[0292]
实施例1中,说明了飞行体600具有的螺旋桨护罩641的第1面pl1被着色为预先设定的颜色,但并不限定于此。本实施例中,螺旋桨护罩641的第1面pl1为发出预先设定的颜色的光的发光面。以下,对与实施例1相同的构成,使用与实施例1中所使用的符号相同的符号进行说明,但主要对本实施例与实施例1的不同进行说明。
[0293]
在本实施例的螺旋桨护罩641的第1面pl1,例如设置有led(light emitting diode,发光二极管)发光元件。第1面pl1的发光元件经由未图示的缆线连接于飞行体600的驱动电路619。
[0294]
本实施例的飞行体600的cpu611执行图17所示的飞行控制处理。当开始执行飞行控制处理时,cpu611执行与图6的步骤s01至s05相同的处理(步骤s71至s75)。由此,决定飞行路径后,飞行体600从营业场所bo起飞。
[0295]
接下来,飞行体600的获取部691从信息存储部699,获取表示使第1面pl1发光的预先设定的发光时段的信息。本实施例中,发光时段预先设定为从包含日落时刻在内的预先设定的时段中所含的时刻,至包含日出时刻在内的预先设定的时段中所含的时刻为止的时段,但并不限定于此。
[0296]
其后,飞行体600的获取部691例如获取os(operating system,操作系统)管理的系统时间。接下来,飞行体600的控制部692判断获取的系统时间是否包含在发光时段中(步骤s76)。此时,控制部692当判断出系统时间包含在发光时段中时(步骤s76;是),执行发光控制处理,即,将用以使第1面pl1发光的控制信号输出至驱动电路619(步骤s77)。驱动电路619根据控制信号使第1面pl1的发光元件发光。
[0297]
步骤s76中,飞行体600的控制部692当判断出系统时间不包含在发光时段中时(步骤s76;否),执行熄灯控制处理,即,将用以使第1面pl1停止发光的控制信号输出至驱动电路619(步骤s78)。驱动电路619根据控制信号而使第1面pl1的发光元件熄灯。
[0298]
执行步骤s77或s78后,执行与图6的步骤s06至s16相同的处理(步骤s79至s89)。由此,飞行体600使第1面pl1朝向第1观察点pb1或第2观察点pb2,将第1对向通知或第2对向通知发送至第1终端装置800或第2终端装置900后飞行至移动目的地。
[0299]
根据所述构成,飞行体600的第1面pl1发出预先设定的颜色的光,飞行体600的控制部692进行发光控制处理,使第1面pl1在从包含日落时刻在内的预先设定的时段中所含的时刻,至包含日出时刻在内的预先设定的时段中所含的时刻为止的发光时段发光。因此,例如即便因日落而照度降低,由于飞行体600使朝向第1观察点pb1或第2观察点pb2的第1面pl1以预先设定的颜色发光,因此也可抑制从第1观察点pb1或第2观察点pb2视辩时的视辨性降低。
[0300]
<实施例3的变化例1>
[0301]
实施例3中,说明了飞行体600的控制部692在预先设定的发光时段使第1面pl1发光,但并不限定于此。
[0302]
本变化例的飞行体600具备未图示的照度传感器,当由照度传感器测定出的照度为预先设定的照度以下时,使第1面pl1发光,且当测定出的照度大于预先设定的照度时使第1面pl1熄灯。
[0303]
因此,飞行体600的获取部691根据从照度传感器输出的信号,获取表示由照度传感器测定出的照度的信息。此外,获取部691获取信息存储部699存储的表示预先设定的照
度的信息。其后,控制部692当判断出获取的信息所表示的测定的照度为预先设定的照度以下时,执行使第1面pl1发光的发光控制处理。相对于此,当判断出测定的照度大于预先设定的照度时,执行使第1面pl1的发光停止的熄灯控制处理。
[0304]
<实施例3的变化例2>
[0305]
实施例3中,说明了发光时段为从包含日落时刻在内的预先设定的时段中所含的时刻,至包含日出时刻在内的预先设定的时段中所含的时刻为止的时段。然而,并不限定于此,发光时段也可为日落时刻至日出时刻的时段,也可为从比日落时刻晚预先设定的时间的时刻,至比日出时刻早预先设定的时间的时刻为止的时段。此外,飞行体600的控制部692也可不分时段地使第1面pl1发光。
[0306]
<实施例3的变化例3>
[0307]
实施例3中,说明了第1面pl1为设置有led发光元件的螺旋桨护罩641的宽幅面,但并不限定于此。第1面pl1也可为飞行体600具备的显示装置615b的显示面。该情况下,显示面只要具有发光的未图示的背光源即可。此外,也可在第1面pl1例如设置荧光灯、水银灯、金属卤化物灯、卤素灯、或灯泡来代替led。
[0308]
<实施例4>
[0309]
实施例1中,说明了第1观察者在飞行体600飞行于第1观察空域ab1的情况下观察飞行体600,第2观察者在飞行体600飞行于第2观察空域ab2的情况下观察飞行体600。因此,说明了飞行体600当在第1观察空域ab1中飞行时,使预先设定的颜色的第1面pl1朝向第1观察者所处的第1观察点pb1,且当在第2观察空域ab2中飞行时,使第1面pl1朝向第2观察者所处的第2观察点pb2。
[0310]
然而,并不限定于此,本实施例的第1观察者与第2观察者不管飞行体600是在第1观察空域ab1中飞行,还是在第2观察空域ab2中飞行,在飞行体600飞行的情况下均可观察飞行体600。因此,本实施例的飞行体600当从营业场所bo起飞时,使预先设定的颜色的第1面pl1朝向第1观察点pb1与第2观察点pb2中靠近飞行体600的位置的第1观察点pb1。其后,飞行体600当从第1终端装置800接收到通知第1观察者视辩飞行体600的视辨报告时,使第1面pl1朝向第2观察点pb2。以下,对与实施例1相同的构成,使用与实施例1中所使用的符号相同的符号进行说明,但主要对本实施例与实施例1的不同进行说明。
[0311]
本实施例的飞行体600的信息存储部699预先存储图18所示的终端表格。在终端表格的第1个记录中预先保存有第1终端装置800的通信地址、与表示无法由携带第1终端装置800的第1观察者视辩飞行体600的值“伪”的视辨旗标。然而,与实施例1相同,第1个记录中未保存表示第1观察点pb1的位置的信息。在终端表格的第2个记录中预先保存有第2终端装置900的通信地址、与值“伪”的视辨旗标,但未保存表示第2观察点pb2的位置的信息。
[0312]
本实施例的飞行体600的cpu611执行图19所示的飞行控制处理。当开始执行飞行控制处理时,cpu611执行与图6的步骤s01至s04相同的处理(步骤s91至s94)。由此,飞行体600的数据通信电路614a接收表示由第1观察者携带的第1终端装置800的位置的信息、与表示由第2观察者携带的第2终端装置900的位置的信息。此外,控制部692将接收的信息所表示的第1终端装置800的位置的点,通过设定为第1观察者进行观察的点、且预先设定的颜色的第1面pl1所朝向的第1观察点pb1,而设为预先设定的第1设定点。此外,控制部692将表示第1观察点pb1的位置的信息保存在图18的终端表格的第1个记录中。相同地,控制部692将
第2终端装置900的位置的点通过设定为第2观察点pb2而设为预先设定的第2设定点。此外,控制部692将表示第2观察点pb2的位置的信息保存于终端表格的第2个记录中。
[0313]
本实施例,为简化说明,而与实施例1相同地将第1观察点pb1与第2观察点pb2统称为观察点。此外,本实施例中,将作为第1观察点pb1的别称的第1设定点pb1与作为第2观察点pb2的别称的第2设定点pb2统称为预先设定的点。
[0314]
其后,飞行体600的控制部692将用以从营业场所bo起飞的控制信号输出至驱动电路(步骤s95)。接下来,飞行体600的控制部692从第1观察点pb1、第2观察点pb2、及移动目的地中选择一个作为预先设定的颜色的第1面pl1所朝向的目的地(步骤s96)。
[0315]
本实施例中,列举在时刻t11,飞行体600从营业场所bo起飞的情况为具体例进行以下说明。
[0316]
在时刻t11,飞行体600的控制部692为了选择朝向目的地,而从图18的终端表格中获取表示观察点的位置的信息,该信息与表示未视辨的值“伪”的视辨旗标建立对应。在时刻t11飞行体600离开营业场所bo后不久,第1观察者及第2观察者双方未视辩到飞行体600,控制部692获取表示第1观察点pb1的位置的信息与表示第2观察点pb2的位置的信息。
[0317]
接下来,飞行体600的控制部692根据图10的步骤s21中获取的表示飞行体600的位置的信息、与表示第1观察点pb1的位置的信息,算出从飞行体600至第1观察点pb1的距离。相同地,控制部692算出从飞行体600至第2观察点pb2的距离。
[0318]
本实施例,如图20所示,第1观察点pb1比第2观察点pb2更靠近营业场所bo。因此,在时刻t11飞行体600从营业场所bo起飞后不久,飞行体600的控制部692判断出飞行体600至第1观察点pb1的距离,短于飞行体600至第2观察点pb2的距离,选择第1观察点pb1作为预先设定的颜色的第1面pl1的朝向目的地。
[0319]
接下来,飞行体600的控制部692判断出所选择的朝向目的地为第1观察点pb1(步骤s97;是)。接下来,控制部692执行图11的方向变更控制处理,以使飞行体600将第1面pl1朝向第1观察点pb1飞行(步骤s98)。本实施例中,与实施例1相同,将为了使第1面pl1朝向第1观察点pb1而执行的方向变更控制处理称为第1方向变更控制处理。
[0320]
其后,飞行体600的控制部692通过执行实施例1中所说明的第1通知控制处理,而使数据通信电路614a将第1对向通知发送至第1终端装置800(步骤s99)。
[0321]
其后,飞行体600的控制部692执行使飞行体600顺行飞行过飞行路径的顺行飞行控制处理(步骤s100)。接下来,控制部692判断数据通信电路614a是否从第1终端装置800接收到视辨报告(步骤s101)。
[0322]
本实施例中,说明了在时刻t11后不久,第1观察者视辩飞行体600,并对第1终端装置800的输入装置805c进行发送视辨报告的操作的情况为具体例进行以下说明。因此,当第1终端装置800的输入装置805c输入与该操作对应的信号时,第1终端装置800的cpu801以飞行体600为接收地将视辨报告输出至第1终端装置800的数据通信电路804a。其后,飞行体600的数据通信电路614a接收从第1终端装置800发送的视辨报告。
[0323]
飞行体600的控制部692当判断出接收到视辨报告时(步骤s101;是),在图18的终端表格中,将与第1终端装置800的通信地址建立对应的视辨旗标,更新为表示由携带第1终端装置800的第1观察者视辩飞行体600的值“真”(步骤s102)。接下来,执行与图6的步骤s11至s14相同的处理(步骤s103至s106)。
[0324]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t11后的时刻t12,飞行体600在向移动目的地飞行的同时,执行步骤s107的处理。
[0325]
在时刻t12,飞行体600的控制部692判断出未到达移动目的地(步骤s107;否)。其后,控制部692从图18的终端表格中仅获取表示第2观察点pb2的位置的信息,该信息与表示未视辨的值“伪”的视辨旗标建立对应。因此,飞行体600的控制部692选择第2观察点pb2作为预先设定的颜色的第1面pl1的朝向目的地。
[0326]
接下来,飞行体600的控制部692判断出选择的朝向目的地不为第1观察点pb1而为第2观察点pb2(步骤s97;否及步骤s109;是)。接下来,控制部692执行图11的方向变更控制处理,以使飞行体600将第1面pl1朝向第2观察点pb2飞行(步骤s110)。本实施例中,与实施例1相同,将为了使第1面pl1朝向第2观察点pb2而执行的方向变更控制处理称为第2方向变更控制处理。
[0327]
其后,飞行体600的控制部692通过执行实施例1中所说明的第2通知控制处理,而使数据通信电路614a将第2对向通知发送至第2终端装置900(步骤s111)。
[0328]
其后,飞行体600的控制部692执行顺行飞行控制处理后(步骤s100),判断数据通信电路614a是否从第2终端装置900接收到视辨报告(步骤s101)。
[0329]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t12后不久,第2观察者无法视辩飞行体600,因此不对第2终端装置900进行发送视辨报告的操作。
[0330]
飞行体600的控制部692在判断出未接收到视辨报告后(步骤s101;否),执行步骤s103至s106的处理。
[0331]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t12后的时刻t13,飞行体600在向移动目的地飞行的同时,再次执行步骤s107的处理。
[0332]
在时刻t13,飞行体600的控制部692判断出未到达移动目的地(步骤s107;否),依次执行步骤s96、s97、s109、s111、及s100的处理。由此,飞行体600在使预先设定的颜色的第1面pl1朝向尚未视辨的第2观察点pb2飞行后,对处于第2观察点pb2的第2终端装置900发送第2对向通知。
[0333]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t13后不久,第2观察者视辩到飞行体600,因此对第2终端装置900进行发送视辨报告的操作。
[0334]
飞行体600的控制部692判断出数据通信电路614a从第2终端装置900接收到视辨报告(步骤s101;是),在图18的终端表格中,将与第2终端装置900的通信地址建立对应的视辨旗标更新为值“真”(步骤s102)。接下来,执行步骤s103至s106的处理。
[0335]
本实施例中,列举如下情况为具体例进行以下说明,即,在时刻t13后的时刻t14,向移动目的地飞行的飞行体600再次执行步骤s107的处理。
[0336]
在时刻t14,飞行体600的控制部692判断出未到达移动目的地(步骤s107;否)。其后,控制部692指定出在图18的终端表格中未保存表示观察点的位置的信息,该信息与表示未视辨的值“伪”的视辨旗标建立对应。因此,飞行体600的控制部692选择飞行体600的移动目的地作为预先设定的颜色的第1面pl1的朝向目的地(步骤s96)。
[0337]
接下来,飞行体600的控制部692在判断出所选择的朝向目的地既不为第1观察点pb1也不为第2观察点pb2后(步骤s97;否及步骤s109;否),判读出朝向目的地为移动目的地。接下来,控制部692执行图11的方向变更控制处理,以使飞行体600将第1面pl1朝向移动
目的地飞行(步骤s112)。本实施例中,将为了使第1面pl1朝向移动目的地而执行的方向变更控制处理称为第3方向变更控制处理。
[0338]
第3方向变更控制处理中,飞行体600的控制部692在步骤s31中算出从飞行体600朝向移动目的地的向量后,使用算出的向量执行步骤s32至s39的处理。
[0339]
其后,当在执行步骤s100至s107的处理之后,飞行体600的控制部692判断出到达移动目的地时(步骤s107;是),输出用于着陆的控制信号后(步骤s108),结束执行飞行控制处理。
[0340]
根据所述构成,飞行体600的数据通信电路614a从第1终端装置800接收表示第1终端装置800的位置的信息,且从第2终端装置900接收表示第2终端装置900的位置的信息。此外,飞行体600的控制部692将接收的信息所表示的第1终端装置800的位置的点通过设定为第1观察点pb1而设为第1设定点,且将第2终端装置900的位置的点通过设定为第1观察点pb1而设为第2设定点。进而,控制部692当在进行使预先设定的颜色的第1面pl1朝向第1设定点即第1观察点pb1的第1方向变更控制处理后,数据通信电路614a从第1终端装置800接收到通知视辩到飞行体600的视辨报告时,进行使预先设定的颜色的第1面pl1朝向第2设定点即第2观察点pb2的第2方向变更控制。因此,飞行体600当在第1观察点pb1视辩飞行体600时,可使预先设定的颜色的第1面pl1朝向第2观察点pb2,因此可切实提高从第1观察点pb1视辩飞行体600的视辨性,同时也可提高从第2观察点pb2视辩飞行体600的视辨性。
[0341]
根据所述构成,飞行体600的控制部692当进行第1方向变更控制处理时,进行向第1终端装置800发送第1对向通知的第1通知控制处理,该第1对向通知是通知预先设定的颜色的第1面pl1朝向第1终端装置800。此外,控制部692当进行第2方向变更控制处理时,进行向第2终端装置900发送第2对向通知的第2通知控制处理,该第2对向通知是通知第2终端装置900朝向第1面pl1。因此,飞行体600当使预先设定的颜色的第1面pl1朝向第1终端装置800时,可对第1终端装置800通知第1面pl1已朝向第1终端装置800。由此,携带第1终端装置800的第1观察者可知晓第1面pl1朝向第1终端装置800的时序,因此相比于无法知晓第1面pl1是朝向第1终端装置800,还是朝向第2终端装置900的情况,更容易发现飞行体600。相同地,携带第2终端装置900的第2观察者可容易地发现飞行体600。
[0342]
<实施例5>
[0343]
实施例4中,说明了飞行体600当从营业场所bo起飞时,使预先设定的颜色的第1面pl1朝向第1观察点pb1与第2观察点pb2中靠近飞行体600的位置的第1观察点pb1。此外,飞行体600当从第1终端装置800接收到通知第1观察者视辩到飞行体600的视辨报告时,使第1面pl1朝向第2观察点pb2。
[0344]
然而,并不限定于此,本实施例的飞行体600一面旋转,一面重复进行使第1面pl1朝向第1观察点pb1的第1方向变更控制、与使第1面pl1朝向第2观察点pb2的第2方向变更控制。以下,对与实施例4相同的构成,使用与实施例4中所使用的符号相同的符号进行说明,但主要对本实施例与实施例4的不同进行说明。
[0345]
本实施例的飞行体600的cpu611执行图21所示的飞行控制处理。当开始执行飞行控制处理时,cpu611执行与图19的步骤s91至s95相同的处理(步骤s121至s125)。由此,飞行体600从营业场所bo起飞。
[0346]
接下来,执行图22所示的方向变更控制处理(步骤s126)。当开始执行方向变更控
制处理时,飞行体600的控制部692将表示预先设定的颜色的第1面pl1是否朝向第1观察点pb1的第1对向旗标,初始化为表示第1面pl1未朝向第1观察点pb1的值“伪”。相同地,控制部692将表示预先设定的颜色的第1面pl1是否朝向第2观察点pb2的第2对向旗标初始化为值“伪”(步骤s141)。
[0347]
飞行体600的控制部692通过执行与图11的步骤s31相同的处理,算出从飞行体600朝向第1观察点pb1的第1向量(步骤s142)。接下来,控制部692通过执行与图11的步骤s32及s36相同的处理,算出第1向量与基准方位所成的方位角θ1'、及第1向量与水平面所成的最小的俯角φ1'(步骤s143及s144)。
[0348]
相同地,飞行体600的控制部692算出从飞行体600朝向第2观察点pb2的第2向量、第2向量与基准方位所成的方位角θ2'、第2向量与水平面所成的最小的俯角φ2'(步骤s145至s147)。
[0349]
接下来,飞行体600的控制部692从信息存储部699读出表示预先设定的角度δθ的信息。接下来,控制部692为了使飞行体600旋转而将如下控制信号输出至驱动电路619,该控制信号用以使飞行体600的前方向与基准方位所成的方位角θ增加所读出的信息表示的角度δθ(步骤s148)。
[0350]
接下来,飞行体600的控制部692通过执行与图11的步骤s33相同的处理,获取表示飞行体600的前方向与基准方位所成的方位角θ的信息(步骤s149)。
[0351]
其后,飞行体600的控制部692判断飞行体600的前方向与基准方位所成的方位角θ、和从飞行体600朝向第1观察点pb1的第1向量与基准方位所成的方位角θ1'是否一致(步骤s150)。此时,控制部692当判断出前方向的方位角θ与第1向量的方位角θ1'一致时(步骤s150;是),将如下控制信号输出至驱动电路619,该控制信号用以将飞行体600的前方向与水平面所成的最小的俯角φ变更为第1向量与水平面所成的最小的俯角φ1'(步骤s151)。由此,控制部692执行第1方向变更控制处理,即,使朝向飞行体600的前方向的预先设定的颜色的第1面pl1朝向第1观察点pb1。
[0352]
其后,飞行体600的控制部692在将第1对向旗标的值更新为表示第1面pl1朝向第1观察点pb1的值“真”之后(步骤s152),结束执行方向变更控制处理。
[0353]
步骤s150中,飞行体600的控制部692当判断出方位角θ与方位角θ1'不一致时(步骤s150;否),判断飞行体600的前方向的方位角θ、与从飞行体600朝向第2观察点pb2的第2向量的方位角θ2'是否一致(步骤s153)。此时,控制部692当判断出前方向的方位角θ与第2向量的方位角θ2'一致时(步骤s153;是),将如下控制信号输出至驱动电路619,该控制信号用以将飞行体600的俯角φ变更为第2向量的俯角φ2'(步骤s154)。由此,控制部692执行使第1面pl1朝向第2观察点pb2的第2方向变更控制处理。其后,控制部692将第2对向旗标的值更新为值“真”之后(步骤s155),结束执行方向变更控制处理。
[0354]
步骤s153中,飞行体600的控制部692当判断出方位角θ与方位角θ2'不一致时(步骤s153;否),结束执行方向变更控制处理。
[0355]
在图21的步骤s126中执行方向变更控制处理后,飞行体600的控制部692判断第1对向旗标的值是否为表示预先设定的颜色的第1面pl1朝向第1观察点pb1的值“真”(步骤s127)。此时,控制部692当判断出第1对向旗标的值为“真”时(步骤s127;是),执行第1通知控制处理(步骤s128)。与实施例4相同,第1通知控制处理为使数据通信电路614a将第1对向
通知发送至第1终端装置800的处理,该第1对向通知是通知第1面pl1朝向第1观察点pb1处的第1终端装置800。
[0356]
步骤s127中,飞行体600的控制部692当判断出第1对向旗标的值不为“真”时(步骤s127;否),判断第2对向旗标的值是否为“真”(步骤s129)。此时,控制部692当判断出第2对向旗标的值为“真”时(步骤s129;是),执行使第2对向通知发送至第2终端装置900的第2通知控制处理(步骤s130)。
[0357]
执行步骤s128或s130之后,或在步骤s129中,当判断出第2对向旗标的值不为“真”时(步骤s129;否),执行与图19的步骤s100及s103至s106的处理相同的处理(步骤s131至s135)。由此,飞行体600顺行飞行过飞行路径。
[0358]
其后,当飞行体600的控制部692判断出飞行体600未到达移动目的地时(步骤s136;否),重复步骤s126至s135的处理(步骤s126至s135)。其后,当控制部692判断出飞行体600到达移动目的地时(步骤s136;是),执行与图6的步骤s16相同的处理(步骤s137),由此飞行体600到达移动目的地后结束执行飞行控制处理。
[0359]
根据所述构成,飞行体600的控制部692在使飞行体600旋转的同时,重复进行第1方向变更控制处理与第2方向变更控制处理,当预先设定的颜色的第1面pl1朝向第1设定点即第1观察点pb1时,进行第1通知控制处理,且当预先设定的颜色的第1面pl1朝向第2设定点即第2观察点pb2时,进行第2通知控制处理。因此,飞行体600可在飞行体600旋转一圈所需的时间内使预先设定的颜色的第1面pl1朝向第1观察点pb1与第2观察点pb2,因此可提高在旋转一圈所需的时间内从第1观察点pb1与第2观察点pb2双方视辩飞行体600的视辨性。此外,飞行体600可在旋转一圈所需的时间内,对第1终端装置800及第2终端装置900双方通知第1面pl1已朝向第1观察点pb1与第2观察点pb2。
[0360]
<实施例5的变化例>
[0361]
实施例5中,说明了飞行体600的控制部692在使飞行体600旋转的同时,重复进行第1方向变更控制处理与第2方向变更控制处理,但并不限定于此。飞行体600的控制部692也可在预先设定的时间内,按照预先规定的规则或随机重复进行实施例1中所说明的第1方向变更控制处理与第2方向变更控制处理。预先规定的规则也可为交替执行第1方向变更控制处理与第2方向变更控制处理。
[0362]
<实施例6>
[0363]
实施例2中,说明了飞行体600具备具有显示面的显示装置615b,且显示面为平面。此外,实施例2中,说明了飞行体600在图14的步骤s49中执行使预先设定的颜色的图像显示在显示面上的显示控制处理后,在步骤s50中进行使显示面朝向预先设定的点的方向变更控制处理。
[0364]
然而,并不限定于此,本实施例的飞行体600也可具有图23所示的圆筒形状的显示装置680来代替显示装置615b,显示装置680的显示面为形成圆筒的侧面的曲面。此外,本实施例的飞行体600进行显示控制处理,即,使预先设定的颜色的图像显示在显示装置680的显示面、且朝向预先设定的点的一部分面。以下,对与实施例2相同的构成,使用与实施例2中所使用的符号相同的符号进行说明,但主要对本实施例与实施例2的不同进行说明。
[0365]
本说明书中,将实施例2的显示装置615b的显示面、且朝向预先设定的点的面称为第1面,将本实施例的显示装置680的显示面、且朝向预先设定的点的一部分面称为第2面,
以此来区分这2个面。此外,本说明书中,将实施例2中说明的显示控制处理称为第1显示控制处理,将本实施例中说明的显示控制处理称为第2显示控制处理,以此来区分这2个显示控制处理。
[0366]
本实施例的飞行体600与实施例2的飞行体600相同,在控制装置610的上表面具备图13所示的半球型的摄像装置670。
[0367]
此外,本实施例的飞行体600在控制装置610的下方具备储存物品的储存库650,而不具备围持物品的第1围持架651a及第2围持架651b,此点与实施例2的飞行体600不同。储存库650具备箱体,该箱体形成由未图示的背板、底板、顶板、及2个侧板封闭、且前方开放的空间。在箱体的开口部,设置有门与支承门的未图示的门框。
[0368]
在飞行体600的储存库650的下表面设置有圆筒形状的显示装置680。显示装置680以飞行体600的下方向与圆筒的轴平行,且圆筒的轴通过位置测量电路616的方式设置在储存库650的下表面。因此,位置测量电路616测量的飞行体600的维度及经度,与圆筒的轴的维度及经度一致。
[0369]
飞行体600的显示装置680具有形成圆筒的侧面的显示面。因此,如果飞行体600在比第1观察点pb1及第2观察点pb2的高度高的位置、且与第1观察点pb1及第2观察点pb2的正上方的位置不同的位置飞行,则不管第1观察点pb1及第2观察点pb2在何处,均可从第1观察点pb1及第2观察点pb2目视到显示装置680具有的显示面的至少一部分。
[0370]
飞行体600具备的显示装置680的显示面的主扫描方向为与圆筒的轴垂直的方向,且副扫描方向为与圆筒的轴平行的方向。显示装置680的显示面由nc个像素沿副扫描方向排列而成的像素列沿主扫描方向排列nr列而成的像素面构成(其中,nc及nr为2以上的整数)。像素列编号为1号的像素列至nr号像素列等间隔配置,1号像素列配置在如下位置,该位置在以飞行体600的前方向为基准方位的情况下,从该基准方位沿逆时针测量的方位角为0度。因此,n号像素列配置在如下位置,该位置在以飞行体600的前方向为基准方位的情况下,从该基准方位沿逆时针测量的方位角为下述的式所表示的角度θn(其中,n为1以上nr以下的整数)。
[0371]
θn=(n-1)
×
360/nr
···
(5)
[0372]
其中,θn表示方位角,nr表示像素列的总数,n表示像素列的编号。
[0373]
本实施例的飞行体600的cpu611执行图24所示的飞行控制处理。当开始执行飞行控制处理时,cpu611执行与图14的步骤s41至s48相同的处理(步骤s161至s168)。由此,通过飞行体600的摄像装置670对与从飞行体600朝向第1观察点pb1或第2观察点pb2的方向相反的方向进行拍摄而获得摄像图像,将显示装置680上显示的图像的颜色设定为摄像图像的颜色的补色。
[0374]
接下来,执行图25所示的第2显示控制处理,即,使步骤s168中设定的颜色的图像显示在显示装置680具有的圆筒形状的显示面、且为朝向第1观察点pb1或第2观察点pb2的一部分面即第2面(步骤s169)。
[0375]
当开始执行第2显示控制处理时,飞行体600的控制部692通过执行与图11的步骤s31相同的处理,算出从飞行体600朝向第1观察点pb1或第2观察点pb2的图26所示的向量v(步骤s181)。
[0376]
接下来,飞行体600的控制部692算出从为北的基准方位沿逆时针测量的向量v的
方位角θ'(步骤s182)。此外,获取部691通过执行与图11的步骤s33相同的处理,获取从为北的基准方位沿逆时针测量的表示飞行体600的前方向的向量vf的方位角θ的信息(步骤s183)。
[0377]
其后,飞行体600的控制部692在以飞行体600的前方向为基准方位的情况下,在从圆筒的轴朝向第1观察点pb1或第2观察点pb2的方向上,通过从方位角θ'减去方位角θ而算出从该基准方位沿逆时针测量的方位角“θ'-θ”。
[0378]
接下来,飞行体600的控制部692从信息存储部699获取表示显示装置680的视野角θa的信息(步骤s184)。接下来,控制部692指定出配置在如下位置的多个像素列,该位置是以飞行体600的前方向为基准方位的情况下的方位角为包含在“θ'-θ-θa/2”“θ'-θ+θa/2”的范围内的角度的位置。其后,控制部692将由指定的多个像素列构成的部分像素面指定为可从第1观察点pb1或第2观察点pb2目视到显示的图像的可目视面(步骤s185)。此外,控制部692将指定为可目视面的部分像素面指定为朝向第1观察点pb1或第2观察点pb2的第2面pl2(步骤s186)。
[0379]
为了指定第2面pl2,飞行体600的控制部692判断方位角“θ'-θ-θa/2”是否为负值。此时,控制部692当判断出方位角“θ'-θ-θa/2”为负值时,通过对“θ'-θ-θa/2”加上360度而成为正值。其后,将加上360度后的方位角用于上述的式(5),以此算出配置在方位角为“θ'-θ-θa/2”的位置的像素列的像素编号nl。相同地,控制部692将方位角“θ'-θ+θa/2”用于上述的式(5),以此算出配置在方位角为“θ'-θ+θa/2”的位置的像素列的像素编号nu。其后,控制部692将由像素编号为nl号至nr号的像素列与1号至nu号的像素列构成的部分像素面指定为第2面pl2。
[0380]
相对于此,飞行体600的控制部692当判断出方位角“θ'-θ-θa/2”不为负值时,判断方位角“θ'-θ+θa/2”是否为360度以上的值。此时,控制部692当判断出方位角“θ'-θ+θa/2”为360度以上的值时,从“θ'-θ+θa/2”减去360度。其后,将减去360度后的方位角用于上述的式(5),以此算出配置在方位角为“θ'-θ+θa/2”的位置的像素列的像素编号nu。相同地,控制部692算出配置在方位角为“θ'-θ-θa/2”的位置的像素列的像素编号nl。其后,控制部692将由nl号至nr号的像素列与1号至nu号的像素列构成的部分像素面指定为第2面pl2。
[0381]
相对于此,飞行体600的控制部692当判断出方位角“θ'-θ+θa/2”为小于360度的值时,将方位角“θ'-θ-θa/2”及“θ'-θ+θa/2”用于上述的式(5),以此算出像素编号nu及nl。其后,控制部692将由nl号至nu号的像素列构成的部分像素面指定为第2面pl2。
[0382]
其后,飞行体600的控制部692生成第2面pl2上显示的部分图像的颜色为图24的步骤s168中预先设定的颜色的整个图像(步骤s187)。接下来,控制部692通过使生成的整个图像显示在显示装置680的显示面上,而使预先设定的颜色的部分图像显示在朝向第1观察点pb1或第2观察点pb2的第2面pl2上(步骤s188)。其后,控制部692结束执行第2显示控制处理。
[0383]
在图24的步骤s169中执行第2显示控制处理后,不执行实施例2中所说明的方向变更控制处理而执行与图14的步骤s51至s58相同的处理后(步骤s170至s177),结束执行飞行控制处理。本实施例中,不执行方向变更控制处理的原因在于,在朝向第1观察点pb1或第2观察点pb2的第2面pl2上显示预先设定的颜色的图像,因此无需变更飞行体600的方向。
[0384]
根据所述构成,在空间中飞行的飞行体600具备获取表示飞行体600的位置的信息的获取部691。此外,飞行体600具备控制部692,该控制部692根据获取的信息而进行第2显示控制处理,即,使预先设定的颜色的图像显示在飞行体600具备的显示装置680的显示面、且为朝向作为预先设定的点的第1观察点pb1或第2观察点pb2的一部分面的第2面pl2。因此,飞行体600可提高从预先设定的点即第1观察点pb1或第2观察点pb2视辩飞行体600的视辨性。
[0385]
根据所述构成,飞行体600还具备摄像装置670,该摄像装置670从飞行体600对与从飞行体600朝向预先设定的点即第1观察点pb1或第2观察点pb2的方向相反的方向进行拍摄而获得摄像图像。此外,飞行体600的控制部692将利用摄像装置670获得的摄像图像的颜色的补色,通过设定为在朝向第1观察点pb1或第2观察点pb2的第2面pl2上显示的图像的颜色而设为预先设定的颜色。进而,控制部692进行使预先设定的颜色的图像显示在第2面pl2上的第2显示控制。因此,即便从第1观察点pb1或第2观察点pb2观察飞行体600时所观察到的飞行体600的背景因飞行体600的飞行而发生变化,飞行体600也可在朝向第1观察点pb1或第2观察点pb2的第2面pl2上显示背景颜色的补色的图像。由此,飞行体600可提高从第1观察点pb1或第2观察点pb2视辩飞行体600的视辨性。
[0386]
本实施例中,说明了显示装置680的显示面的主扫描方向为与圆筒的轴垂直的方向,且副扫描方向为与圆筒的轴平行的方向,但并不限定于此。显示面的主扫描方向也可为与圆筒的轴平行的方向,且副扫描方向也可为与圆筒的轴垂直的方向。此外,本实施例中,说明了显示装置680的显示面由nc个像素沿副扫描方向排列而成的像素列沿主扫描方向排列nr列而成的像素面构成,但并不限定于此。显示面也可由nc个像素沿主扫描方向排列而成的像素行沿副扫描方向排列nr行而成的像素面构成。
[0387]
说明了本实施例的飞行体600在图24的步骤s168中执行颜色设定处理后,在步骤s169中执行图25所示的第2显示控制处理。由此,说明了飞行体600指定显示装置680的显示面的一部分、且朝向第1观察点pb1或第2观察点pb2的第2面pl2,使通过执行颜色设定处理而预先设定的颜色的部分图像显示在第2面pl2上。
[0388]
然而,并不限定于此,飞行体600也可在步骤s168中执行颜色设定处理后,执行未图示的第2显示控制处理来代替图25的第2显示控制处理。未图示的第2显示控制处理也可为如下处理,即,不指定第2面pl2,而在显示装置680的整个显示面上显示步骤s168中预先设定的颜色的整个图像。根据所述构成,飞行体600即便不指定朝向第1观察点pb1或第2观察点pb2的第2面pl2,也可在包含第2面pl2的显示装置680的整个显示面上显示步骤s168中预先设定的颜色的图像。由此,与指定第2面pl2的情况相比,飞行体600可在提高从第1观察点pb1或第2观察点pb2视辩飞行体600的视辨性的同时,减少为了提高视辨性而执行的显示控制处理的演算量。
[0389]
<实施例6的变化例1>
[0390]
实施例6中,说明了飞行体600的摄像装置670对与从飞行体600朝向第1观察点pb1或第2观察点pb2的方向相反的方向进行拍摄,且飞行体600的控制部692执行第2显示控制处理,即,使利用摄像装置670获得的摄像图像的颜色的补色显示在显示装置680的显示面的一部分、且为朝向第1观察点pb1或第2观察点pb2的一部分面的第2面pl2。然而,并不限定于此,本变化例的飞行体600的控制部692执行控制显示装置680的显示面的整体颜色的第2
显示控制处理。
[0391]
当开始执行本变化例的第2显示控制处理时,飞行体600的控制部692将表示像素列的编号的变数n初始化为值“1”。接下来,控制部692将变数n用于上述的式(5),由此执行如下处理,即,在以飞行体600的前方向为基准方位的情况下,算出该基准方位与从圆筒的轴朝向1号像素列的方向所成的方位角θ1。
[0392]
其后,飞行体600的控制部692通过对算出的方位角θ1加上180度,而算出与从圆筒的轴朝向1号像素列的方向相反的方向的方位角θr1。接下来,控制部692将控制信号输出至驱动电路619,该控制信号是使飞行体600的前方向与摄像装置670的光轴ao所成的方位角变更为算出的方位角θr1。其后,控制部692将命令摄像的信号输出至摄像装置670后,从摄像装置670获取表示摄像图像的信息。接下来,飞行体600的控制部692将构成显示装置680上显示的整个图像的1号像素列的颜色设定为获取的信息所表示的摄像图像的补色。
[0393]
其后,飞行体600的控制部692从算出方位角θn的处理起重复上述处理,直至使表示像素列的编号的变数n增加值“1”后变数n的值大于像素列的总数nr为止,以此设定构成整个图像的2号至nr号像素列的颜色。
[0394]
当变数n的值大于像素列的总数nr时,飞行体600的控制部692生成具有所设定的1号至nr号像素列的颜色的整个图像,并进行使生成的整个图像显示在显示装置680的显示面上的控制。其后,控制部692结束执行第2显示控制处理。
[0395]
根据所述构成,飞行体600具有圆筒形状的显示装置680,显示装置680具备形成圆筒的侧面的显示面。显示面由沿与圆筒的轴平行的方向排列多个像素而成的像素列沿与圆筒的轴垂直的主扫描方向排列nr个而成的像素面构成。飞行体600的控制部692针对1号至nr号的编号的n号像素列的各者,将通过使摄像装置670拍摄与从圆筒的轴朝向n号像素列的方向相反的方向而得的摄像图像的颜色的补色设定为n号像素列的颜色。此外,控制部692生成具有所设定的1号至nr号的像素列的颜色的图像,并使生成的图像显示在圆筒形状的显示装置680。因此,从任何方位角观察飞行体600,均可提高从进行观察的点视辩飞行体600的视辨性。此外,即便同时从互不相同的地点即第1观察点pb1及第2观察点pb2观察飞行体600,仍可提高从第1观察点pb1及第2观察点pb2双方视辩飞行体600的视辨性。
[0396]
本变化例中,说明了飞行体600的控制部692算出n号像素列的方位角θn,在使摄像装置670的光轴ao的方位角变更为方位角θn加上180度而得的方位角后进行拍摄,并将n号像素列的颜色设定为摄像所得的摄像图像的补色。然而,并不限定于此,控制部692也可算出n号至n+k号的多个像素列的方位角的平均值,使摄像装置670的光轴ao的方位角变更为方位角的平均值加上180度而得的方位角后进行拍摄,并将n号至n+k号像素列的颜色设定为摄像所得的摄像图像的补色(其中,n为1以上且nr-k以下的整数,k为1以上且nr-n以下的整数,且nr为2以上的整数)。
[0397]
<实施例6的变化例2>
[0398]
实施例6中,说明了飞行体600具备圆筒形状的显示装置680。此外,实施例6中,说明了飞行体600的控制部692将显示装置680具有的形成圆筒的侧面的显示面、且可从第1观察点pb1或第2观察点pb2目视到显示的图像的一部分面,指定为朝向第1观察点pb1或第2观察点pb2的第2面pl2。
[0399]
然而,并不限定于此,也可为飞行体600具备未图示的方筒形状的显示装置,方筒
形状的显示装置具有分别形成方筒所具有的多个侧面的多个平面形状的显示面。此外,飞行体600的控制部692也可将方筒形状的显示装置所具有的多个显示面中,可从第1观察点pb1或第2观察点pb2目视到显示的图像的1个或多个显示面的整个面或一部面,指定为朝向第1观察点pb1或第2观察点pb2的第2面pl2。
[0400]
此外,并不限定于此,也可为飞行体600具备具有平面形状的显示面的多个显示装置,该多个显示装置以形成方筒、且显示面朝向方筒的外侧的方式设置在飞行体600上。此外,飞行体600的控制部692也可将形成方筒的多个显示装置中,可从第1观察点pb1或第2观察点pb2目视到显示的图像的1个或多个显示装置分别具有的显示面的整个面或一部面,指定为朝向第1观察点pb1或第2观察点pb2的第2面pl2。
[0401]
<实施例6的变化例3>
[0402]
实施例6中,说明了飞行体600在控制装置610的上侧具备摄像装置670,且在控制装置610的下侧具备显示装置680,但并不限定于此。飞行体600也可在控制装置610的上侧具备摄像装置670与显示装置680。此外,飞行体600在控制装置610的下侧具备摄像装置670,在控制装置610的上侧具备显示装置680,也可在控制装置610的下侧具备摄像装置670与显示装置680。进而,飞行体600在控制装置610的下侧与上侧分别具备具有与摄像装置670相同的构成及功能的摄像装置,也可在控制装置610的上侧与下侧分别具备具有与显示装置680相同的构成及功能的显示装置。
[0403]
<实施例6的变化例4>
[0404]
实施例3与实施例6可加以组合。即,第2面pl2也可发出预先设定的颜色的光。此外,飞行体600的控制部692也可进行如下发光控制,即,使第2面pl2在从包含日落时刻在内的预先设定时段中所含的时刻,至包含日出时刻在内的预先设定的时段中所含的时刻为止的时段发光。
[0405]
<实施例6的变化例5>
[0406]
实施例1的变化例2与实施例6可加以组合。即,飞行体600的控制部692,也可当由获取部691获取的信息所表示的飞行体600的位置至预先设定的点即第1观察点pb1或第2观察点pb2的距离为预先设定的距离l以下时,进行第2显示控制处理及通知控制处理。此外,飞行体600的控制部692,也可当飞行体600的位置至第1观察点pb1或第2观察点pb2的距离大于预先设定的距离l时,不进行第2显示控制处理及通知控制处理。
[0407]
本发明的实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5可相互组合。
[0408]
当然可作为具备用以实现实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的功能的构成的控制装置100,及具备用以实现实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的功能的构成的控制装置610来提供,也可作为由多个装置构成的系统、且系统整体具备用以实现实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的功能的构成的系统来提供。
[0409]
可作为预先具备用以实现实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的功能
的构成的控制装置100来提供。此外,也可通过利用程序,而使现有的控制装置作为实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的控制装置100发挥功能。即,通过控制现有控制装置的计算机(cpu等)执行用以实现上述实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者所例示的控制装置100的各功能构成的程序,而使现有控制装置作为实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的控制装置100发挥功能。
[0410]
可作为预先具备用以实现本发明的实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的功能的构成的控制装置610来提供。此外,也可通过利用程序,而使现有控制装置作为实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的控制装置610发挥功能。即,通过控制现有控制装置的计算机(cpu等)执行用以实现上述实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者所例示的控制装置610的各功能构成的程序,而使现有控制装置作为实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的控制装置610发挥功能。
[0411]
该程序的发布方法为任意方法,例如可存储在存储卡、cd(compact disc,紧密光盘)-rom、或dvd(digital versatile disc,数字通用光盘)-rom等记录媒介中来发布,此外可经由因特网等通信媒介来发布。
[0412]
本发明的方法可使用实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的控制装置100,及实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的控制装置610来实施。此外,本发明的方法可使用实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的飞行系统1来实施。进而,本发明的方法可使用实施例1至6、实施例1的变化例1至16、实施例2的变化例1至3、实施例3的变化例1至3、实施例5的变化例、及实施例6的变化例1至5中任一者的飞行体600来实施。
[0413]
此外,本发明可在不脱离本发明的广义精神与范围内采取各种实施方式及变化。此外,上述实施方式是用来说明本发明,并不限定本发明的范围。即,本发明的范围不是由实施方式而是由权利要求的范围来表示。而且在权利要求的范围及与其相同的发明的主旨范围内实施的各种变化可视为处在本发明的范围内。
[0414]
(附记)
[0415]
(附记1)
[0416]
一种飞行体,其特征在于,在空间中飞行,且具备:
[0417]
获取部,获取表示所述飞行体的位置的信息;及
[0418]
控制部,根据获取的所述信息而进行方向变更控制,即,使所述飞行体具备的面、且为预先设定的颜色的面的第1面朝向预先设定的点,或
[0419]
根据获取的所述信息而进行显示控制,即在所述飞行体具备的显示装置的显示面、且为朝向所述预先设定的点的一部分面或整个面的第2面上显示所述预先设定的颜色的图像。
[0420]
(附记2)
[0421]
根据附记1所述的飞行体,其特征在于:
[0422]
朝向所述预先设定的点的所述第1面为与朝向所述预先设定的点的所述第2面不同的显示面,且
[0423]
还具备摄像部,从所述飞行体拍摄与从所述飞行体朝向所述预先设定的点的方向相反的方向而获得图像,
[0424]
所述控制部,
[0425]
将利用所述摄像部获得的所述图像的颜色的补色,通过设定为在所述第1面上显示的图像的颜色、或在所述第2面上显示的所述图像的颜色而设为所述预先设定的颜色,且
[0426]
进行使所述预先设定的颜色的所述图像显示在所述第1面上的控制、且与所述显示控制不同的第1显示控制,或使所述预先设定的颜色的所述图像显示在所述第2面上的控制、且为所述显示控制的第2显示控制。
[0427]
(附记3)
[0428]
根据附记1或2所述的飞行体,其特征在于:
[0429]
所述第1面或所述第2面发出所述预先设定的颜色的光,
[0430]
所述控制部进行发光控制,即,使所述第1面或所述第2面在从包含日落时刻在内的预先设定的时段中所含的时刻,至包含日出时刻在内的预先设定的时段中所含的时刻为止的时段发光。
[0431]
(附记4)
[0432]
根据附记1至3中任一项所述的飞行体,其特征在于:
[0433]
所述获取部,
[0434]
从将预先规定的地域、与记载该预先规定的地域中的建造物及自然物的至少一者的位置及形状的所述地图建立对应而加以存储的存储部,获取与包含所述预先设定的点的所述地域建立对应的所述地图,
[0435]
所述控制部,
[0436]
根据获取的所述地图,将所述飞行体的飞行路径决定为通过如下通过点的路径,该通过点不同于在与所述预先设定的点之间存在所述建造物或所述自然物的通过点,且
[0437]
进行使所述飞行体沿决定的所述飞行路径飞行的飞行控制。
[0438]
(附记5)
[0439]
根据附记1至4中任一项所述的飞行体,其特征在于:
[0440]
还具备通信部,接收表示终端装置的位置的信息,
[0441]
所述控制部,
[0442]
将接收到的所述信息所表示的所述位置的点通过设定为朝向所述第1面的点而设为所述预先设定的点,且
[0443]
当进行使所述预先设定的颜色的所述第1面朝向所述预先设定的点的所述方向变更控制时,对所述通信部进行通知控制,即,使所述通信部将通知所述第1面朝向所述终端
装置的所述位置的对向通知发送至所述终端装置。
[0444]
(附记6)
[0445]
根据附记1至5中任一项所述的飞行体,其特征在于:
[0446]
所述控制部当获取的所述信息所表示的所述飞行体的所述位置至所述预先设定的点的距离为预先设定的距离以下时,进行所述方向变更控制、或所述显示控制。
[0447]
(附记7)
[0448]
根据附记5所述的飞行体,其特征在于:
[0449]
所述终端装置包含第1终端装置与第2终端装置,
[0450]
所述通信部从所述第1终端装置接收表示所述第1终端装置的位置的信息,且从所述第2终端装置接收表示所述第2终端装置的位置的信息,
[0451]
朝向所述第1面的所述点包含第1点与第2点,
[0452]
所述预先设定的点包含第1设定点与第2设定点,
[0453]
所述控制部将接收到的所述信息所表示的所述第1终端装置的所述位置的点通过设定为所述第1点而设为所述第1设定点,且将所述第2终端装置的所述位置的点通过设定为所述第2点而设为所述第2设定点,
[0454]
所述方向变更控制包含使所述第1面朝向所述第1设定点的第1方向变更控制、与使所述第1面朝向所述第2设定点的第2方向变更控制,
[0455]
所述控制部当在进行使所述第1面朝向所述第1设定点的所述第1方向变更控制后,所述通信部从所述第1终端装置接收到通知视辩到所述飞行体的视辨报告时,进行使所述第1面朝向所述第2设定点的所述第2方向变更控制。
[0456]
(附记8)
[0457]
根据附记7所述的飞行体,其特征在于:
[0458]
所述对向通知包含通知所述第1面朝向所述第1终端装置的所述位置的第1对向通知、与通知所述第1面朝向所述第2终端装置的所述位置的第2对向通知,
[0459]
所述通知控制包含使所述第1对向通知发送至所述第1终端装置的第1通知控制、与使所述第2对向通知发送至所述第2终端装置的第2通知控制,
[0460]
所述控制部当进行所述第1方向变更控制时,进行所述第1通知控制,且当进行所述第2方向变更控制时,进行所述第2通知控制。
[0461]
(附记9)
[0462]
根据附记5所述的飞行体,其特征在于:
[0463]
所述终端装置包含第1终端装置与第2终端装置,
[0464]
所述通信部从所述第1终端装置接收表示所述第1终端装置的位置的信息,且从所述第2终端装置接收表示所述第2终端装置的位置的信息,
[0465]
朝向所述第1面的所述点包含第1点与第2点,
[0466]
所述预先设定的点包含第1设定点与第2设定点,
[0467]
所述控制部将接收到的所述信息所表示的所述第1终端装置的所述位置的点通过设定为所述第1点而设为所述第1设定点,且将所述第2终端装置的所述位置的点通过设定为所述第2点而设为所述第2设定点,
[0468]
所述方向变更控制包含使所述第1面朝向所述第1设定点的第1方向变更控制、与
使所述第1面朝向所述第2设定点的第2方向变更控制,
[0469]
所述通知控制包含:第1通知控制,使通知所述第1面朝向所述第1终端装置的所述位置的第1对向通知发送至所述第1终端装置;及第2通知控制,使通知所述第1面朝向所述第2终端装置的所述位置的第2对向通知发送至所述第2终端装置;
[0470]
所述控制部,
[0471]
在使所述飞行体旋转的同时,重复进行所述第1方向变更控制与所述第2方向变更控制,
[0472]
当所述预先设定的颜色的所述第1面朝向所述第1设定点时,进行所述第1通知控制,且当所述预先设定的颜色的所述第1面朝向所述第2设定点时,进行所述第2通知控制。
[0473]
(附记10)
[0474]
一种系统,其特征在于具备:
[0475]
飞行体,在空间中飞行;
[0476]
获取部,获取表示所述飞行体的位置的信息;及
[0477]
控制部,根据获取的所述信息而进行方向变更控制,即,使预先设定的点朝向所述飞行体具备的面、且为预先设定的颜色的面的第1面,或
[0478]
根据获取的所述信息而进行显示控制,即在所述飞行体具备的显示装置的显示面、且为朝向所述预先设定的点的一部分面或整个面的第2面上显示所述预先设定的颜色的图像。
[0479]
(附记11)
[0480]
一种方法,其特征在于具有:
[0481]
获取步骤,飞行体或系统获取表示所述飞行体的位置的信息;
[0482]
控制步骤,所述飞行体或所述系统,
[0483]
根据获取的所述信息而进行方向变更控制,即,使预先设定的点朝向所述飞行体具备的面、且为预先设定的颜色的面的第1面,或
[0484]
根据获取的所述信息而进行显示控制,即在所述飞行体具备的显示装置的显示面、且为朝向所述预先设定的点的一部分面或整个面的第2面上显示所述预先设定的颜色的图像。
[0485]
[符号的说明]
[0486]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
飞行系统
[0487]
100、610
ꢀꢀꢀꢀꢀꢀꢀꢀ
控制装置
[0488]
101、611、801
ꢀꢀꢀꢀ
cpu
[0489]
102、612、802
ꢀꢀꢀꢀ
ram
[0490]
103a、613a、803a rom
[0491]
103b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
硬盘
[0492]
104a、614a、804a 数据通信电路
[0493]
105a、615a、805a 显卡
[0494]
105b、615b、805b 显示装置
[0495]
105c、615c、805c 输入装置
[0496]
109a、619a、809a 扬声器
[0497]
109b、619b、809b 麦克风
[0498]
600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
飞行体
[0499]
613b、803b
ꢀꢀꢀꢀꢀꢀ
闪速存储器
[0500]
616、806
ꢀꢀꢀꢀꢀꢀꢀꢀ
位置测量电路
[0501]
617a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
方位角传感器
[0502]
617b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
姿态传感器
[0503]
618
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输入输出端口
[0504]
619
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
驱动电路
[0505]
621624
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
螺旋桨臂
[0506]
631~634
ꢀꢀꢀꢀꢀꢀꢀ
螺旋桨
[0507]
641~644
ꢀꢀꢀꢀꢀꢀꢀ
螺旋桨护罩
[0508]
650
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
储存库
[0509]
651a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第1围持架
[0510]
651b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第2围持架
[0511]
652a、652b
ꢀꢀꢀꢀꢀ
导轨
[0512]
653
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑腿
[0513]
661
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
lidar传感器
[0514]
670
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
摄像装置
[0515]
671
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体
[0516]
672
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
罩
[0517]
673a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转台
[0518]
673b、675c
ꢀꢀꢀꢀꢀ
电动机
[0519]
674
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
摄像单元
[0520]
675a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
突出部
[0521]
675b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑部件
[0522]
680
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示装置
[0523]
691
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
获取部
[0524]
692
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制部
[0525]
699
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
信息存储部
[0526]
800
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第1终端装置
[0527]
900
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第2终端装置
[0528]
ab1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第1观察空域
[0529]
ab2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第2观察空域
[0530]
ad
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
配送目的地
[0531]
ao
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光轴
[0532]
bo
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
营业场所
[0533]hꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
水平面
[0534]
in
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
因特网pb1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第1观察点
[0535]
pb2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第2观察点
[0536]
pd
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
着地场所
[0537]
pl1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第1面
[0538]
pl2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第2面
[0539]uꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
飞行体的上表面
[0540]vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
从飞行体朝向观察点的向量
[0541]
vf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
朝向飞行体的前方向的向量
[0542]
vr
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
朝向与向量v为相反方向的向量
[0543]
θ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
飞行体的前方向的方位角
[0544]
θa
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
视野角
[0545]
θ'
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
向量v的方位角
[0546]
φ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
飞行体的俯角
[0547]
φr
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
向量vr的仰角。