1.本实用新型涉及无人机技术领域,尤其涉及一种无人机自动补给平台。
背景技术:
2.植保无人机,又名无人飞行器,是用于农林植物保护作业的无人驾驶飞机,该型无人飞机由飞行平台(固定翼飞机、直升机、多轴旋翼式飞行器)、导航飞控、喷洒机构三部分组成,通过地面遥控或导航飞控,来实现喷洒作业,可以喷洒药剂、种子、粉剂等。
3.目前多轴旋翼式飞行器是植保无人机的主流,其相较于另外两种结构轻,重量小且使用成本低,广受欢迎。但是这种多轴旋翼式飞行器的空中作业能力是有限的,每完成一个起落都需要补充相应的药剂,并进行充电。其中,人工加药时需要在田间进行配药,之后再进行灌装,每次操作时都要耗费很长时间。现在市场上的一些无人机在使用时采用了自主飞行,在一定程度上减轻了这个补给作业对飞手带来的影响。但是,仍然缺乏一种更为有效,更直接的措施来解决补给作业对飞手的影响。
4.因此本领域技术人员致力于开发一种能够自动充电和加药的无人机自动补给平台。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本实用新型所要解决的技术问题是提供一种能够自动充电和加药的无人机自动补给平台。
6.为实现上述目的,本实用新型提供的一种无人机自动补给平台,包括外壳,所述外壳内设置有停放室和补充室;所述停放室的表面盖合有滑动门,所述滑动门连接有驱使其滑动的第一动力机构;所述停放室的底部设置有升降平台,所述升降平台连接有驱使其升降的第二动力机构;所述补充室放置有药箱、电池和机械抓手,所述药箱设置有输液泵和输液管,所述电池连接有充电线,所述机械抓手、第一动力机构、第二动力机构和输液泵电连接有中央控制系统。
7.所述滑动门设置有对开的两扇,所述第一动力机构包括与所述中央控制系统电连接且安装在所述滑动门底部的第一电机,所述第一电机的转轴连接有第一齿轮,所述停放室的内侧壁安装有与所述第一齿轮啮合的第一齿条。
8.所述升降平台包括承载多孔板,所述第二动力机构包括安装在所述承载多孔板底部的液压臂,所述液压臂连接有与所述中央控制系统电连接的液压泵。
9.所述承载多孔板贯穿设置有若干个散热孔,所述散热孔的孔径小于2mm。
10.所述散热孔的数量有个,且呈20
×
20形式排布。
11.本实用新型的有益效果是:本实用新型的无人机自动补给平台,包括外壳,外壳内设置有停放室和补充室;停放室的表面盖合有滑动门,滑动门连接有驱使其滑动的第一动力机构;停放室的底部设置有升降平台,升降平台连接有驱使其升降的第二动力机构;补充室放置有药箱、电池和机械抓手,药箱设置有输液泵和输液管,电池连接有充电线,机械抓
手、第一动力机构、第二动力机构和输液泵电连接有中央控制系统。当无人机返航时,中央控制系统控制滑动门打开,升降平台升起,无人机降落在升降平台上,然后升降平台下降至停放室内,机械抓手依次抓取充电线和输液管分别连接无人机上的充电口和输液口,电池为无人机充电,输液泵将药箱内的药液泵入储液箱中,结构简单,自动化程度高,降低减少飞手的劳动强度。
附图说明
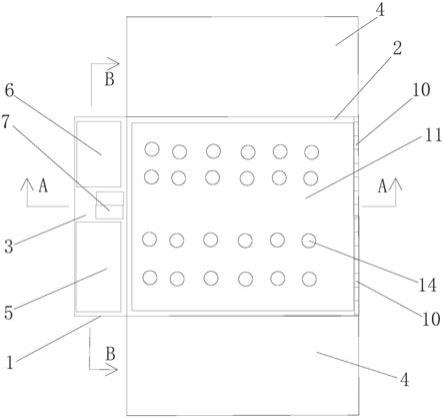
12.图1是本实用新型在滑动门打开时的结构俯视图;
13.图2是图1中a
‑
a处结构剖视图;
14.图3是图1中b
‑
b处结构剖视图。
具体实施方式
15.下面结合附图和实施例对本实用新型作进一步说明,需注意的是,在本实用新型的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方式构造和操作,因此不能理解为对本实用新型的限制。术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
16.如图1至图3所示,一种无人机自动补给平台,包括外壳1,外壳1内设置有停放室2和补充室3;停放室2的表面盖合有滑动门4,滑动门4连接有驱使其滑动的第一动力机构;停放室2的底部设置有升降平台,升降平台连接有驱使其升降的第二动力机构;补充室3放置有药箱5、电池6和机械抓手7,药箱 5设置有输液泵和输液管,电池6连接有充电线,机械抓手7、第一动力机构、第二动力机构和输液泵电连接有中央控制系统。当无人机返航时,中央控制系统控制滑动门打开,升降平台升起,无人机降落在升降平台上,然后升降平台下降至停放室内,机械抓手依次抓取充电线和输液管分别连接无人机上的充电口和输液口,电池为无人机充电,输液泵将药箱内的药液泵入储液箱中,结构简单,自动化程度高,降低减少飞手的劳动强度。
17.在本实施例中,滑动门4设置有对开的两扇,第一动力机构包括与中央控制系统电连接且安装在滑动门4底部的第一电机8,第一电机8的转轴连接有第一齿轮9,停放室2的内侧壁安装有与第一齿轮9啮合的第一齿条10,由于滑动门4设置有对开的两扇,所以相应的第一动力机构也有两组,这样分别控制两扇滑动门4箱两边打开或者向中间合拢。
18.升降平台包括承载多孔板11,第二动力机构包括安装在承载多孔板11底部的液压臂12,液压臂12连接有与中央控制系统电连接的液压泵13,在本实施例中,液压臂12有两组呈x形交叉设置,支撑效果好;承载多孔板11贯穿设置有若干个散热孔14,散热孔14的孔径小于2mm;散热孔14的数量有40个,且呈20*20形式排布,承载多孔板11可以选钢板材料、其它碳纤维板或铝合金,散热孔用于平台内部的透气及散热。
19.本实用新型的工作原理是:
20.当无人机返航时,中央控制系统控制第一电机8驱动滑动门向两侧滑动打开,液压泵13通过液压臂12和驱动升降平台升起,无人机降落在承载多孔板 11上,然后液压泵13驱
动承载多孔板11下降至停放室内,机械抓手依次抓取充电线和输液管分别连接无人机上的充电口和输液口,电池为无人机充电,输液泵将药箱内的药液泵入储液箱中。
21.该平台能减轻飞行压力对飞手的影响,使原本长期集中精力在操作遥控器控制无人机的影响能分散开来,减小其他事物给无人机操作者带来的精神压力。适合全体植保无人机操作手,尤其是航迹定向操作作业。
22.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
技术特征:
1.一种无人机自动补给平台,包括外壳(1),其特征在于:所述外壳(1)内设置有停放室(2)和补充室(3);所述停放室(2)的表面盖合有滑动门(4),所述滑动门(4)连接有驱使其滑动的第一动力机构;所述停放室(2)的底部设置有升降平台,所述升降平台连接有驱使其升降的第二动力机构;所述补充室(3)放置有药箱(5)、电池(6)和机械抓手(7),所述药箱(5)设置有输液泵和输液管,所述电池(6)连接有充电线,所述机械抓手(7)、第一动力机构、第二动力机构和输液泵电连接有中央控制系统。2.如权利要求1所述的无人机自动补给平台,其特征在于:所述滑动门(4)设置有对开的两扇,所述第一动力机构包括与所述中央控制系统电连接且安装在所述滑动门(4)底部的第一电机(8),所述第一电机(8)的转轴连接有第一齿轮(9),所述停放室(2)的内侧壁安装有与所述第一齿轮(9)啮合的第一齿条(10)。3.如权利要求1所述的无人机自动补给平台,其特征在于:所述升降平台包括承载多孔板(11),所述第二动力机构包括安装在所述承载多孔板(11)底部的液压臂(12),所述液压臂(12)连接有与所述中央控制系统电连接的液压泵(13)。4.如权利要求3所述的无人机自动补给平台,其特征在于:所述承载多孔板(11)贯穿设置有若干个散热孔(14),所述散热孔(14)的孔径小于2mm。5.如权利要求4所述的无人机自动补给平台,其特征在于:所述散热孔(14)的数量有40个,且呈20
×
20形式排布。
技术总结
本实用新型公开了一种无人机自动补给平台,包括外壳,外壳内设置有停放室和补充室;停放室的表面盖合有滑动门,滑动门连接有驱使其滑动的第一动力机构;停放室的底部设置有升降平台,升降平台连接有驱使其升降的第二动力机构;补充室放置有药箱、电池和机械抓手,药箱设置有输液泵和输液管,电池连接有充电线,机械抓手、第一动力机构、第二动力机构和输液泵电连接有中央控制系统。当无人机返航时,降落在升降平台上后下降至停放室内,机械抓手依次抓取充电线和输液管分别连接无人机上的充电口和输液口,电池为无人机充电,输液泵将药箱内的药液泵入储液箱中,结构简单,自动化程度高,降低减少飞手的劳动强度。降低减少飞手的劳动强度。降低减少飞手的劳动强度。
技术研发人员:李昌龙 陈承坤
受保护的技术使用者:重庆帝勒金驰通用机械股份有限公司
技术研发日:2021.04.22
技术公布日:2021/12/14