1.本发明涉及车辆控制技术领域,尤其是涉及一种自动泊车方法和系统。
背景技术:
2.随着智能汽车的增加,车位数量越来越显得紧凑,自动泊车辅助系统的更新迭代,可以依靠环视相机完成对车位的检测,毫米波雷达对障碍物的检测,自动的完成车辆的车位泊入泊出。然而针对一些特殊车位或特殊车辆在泊入车位后,会出现由于停车场地的局限性导致人员下车困难、刮擦车门和越野车辆后备箱车门无法打开的技术问题。
技术实现要素:
3.有鉴于此,本发明的目的在于提供一种自动泊车方法和系统,以缓解现有技术中存在的因场地停车的局限性导致的驾乘人员下车困难、刮擦车门和后备箱车门无法打开的技术问题。
4.第一方面,本发明实施例提供了一种自动泊车方法,包括:在目标车辆到达预设下车点时,对所述目标车辆的周围环境进行障碍物距离检测,得到所述目标车辆的左侧车身与左侧障碍物之间的第一距离,和得到所述目标车辆的尾部与尾部障碍物之间的第二距离;所述预设下车点为所述目标车辆在第一泊车路径上设置的能为驾驶员提供下车空间的参考点;获取所述驾驶员的取物需求指令;基于所述第一距离、所述第二距离和所述取物需求指令,设定所述目标车辆的泊车模式,并基于所述泊车模式执行泊车操作。
5.进一步地,在目标车辆到达预设下车点时,对所述目标车辆的周围环境进行障碍物距离检测之前,所述方法还包括:在接收到目标车辆的泊车指令时,获取所述目标车辆相对于至少一个泊车位的坐标信息;基于所述目标车辆相对于目标泊车位的坐标信息,规划第一泊车路径,以使所述第一泊车路径经过所述预设下车点;所述目标泊车位为所述驾驶员在所述至少一个泊车位中确定的一个泊车位;控制所述目标车辆基于所述第一泊车路径行驶至所述预设下车点。
6.进一步地,获取所述目标车辆相对于至少一个泊车位的坐标信息,包括:对所述目标车辆的四路环视相机进行标定,并设置所述目标车辆后轴为基准坐标系;对所述目标车辆的四路环视相机获取的图像数据进行图像处理,并利用环视拼接融合算法,将处理后的图像数据拼接成目标平面图像;所述目标平面图像包括所述至少一个泊车位的图像信息;将所述目标平面图像输入到预设图像识别模型中,得到所述目标车辆相对于所述至少一个泊车位的坐标信息。
7.进一步地,在目标车辆到达预设下车点时,对所述目标车辆的周围环境进行障碍物距离检测,包括:通过所述目标车辆的左侧车身安装的超声波雷达,对所述左侧车身与所述左侧障碍物进行距离检测,得到所述第一距离;通过所述目标车辆的尾部安装的超声波雷达,对所述尾部与所述尾部障碍物进行距离检测,得到所述第二距离。
8.进一步地,若所述取物需求指令为不需要下车取物,则基于所述第一距离、所述第
二距离和所述取物需求指令,设定所述目标车辆的泊车模式,包括:判断所述第一距离是否小于第一预设阈值;如果是,则在所述驾驶员从所述预设下车点下车后,设定所述泊车模式为车外自动泊车;如果否,则设定所述泊车模式为车内泊车。
9.进一步地,若所述取物需求指令为需要下车取物,则基于所述第一距离、所述第二距离和所述取物需求指令,设定所述目标车辆的泊车模式,包括:基于所述第二距离和泊车距离,确定第三距离;所述泊车距离为所述下车点到所述目标泊车位的泊车点位之间的距离;所述第三距离为所述第二距离和所述泊车距离之差;判断所述第三距离是否小于第二预设阈值;如果是,则规划所述目标车辆的第二泊车路径,以使所述第二泊车路径经过预设取物点;所述预设取物点为能为驾驶员提供下车取物空间的参考点位;控制所述目标车辆基于所述第二泊车路径行驶至所述预设取物点,并在所述驾驶员下车取物后,设定所述泊车模式为车外自动泊车。
10.进一步地,所述方法还包括:如果所述第三距离大于或等于所述第二预设阈值,则判断所述第一距离是否小于第一预设阈值;如果是,则在所述驾驶员从所述预设下车点下车后,设定所述泊车模式为车外自动泊车;如果否,则设定所述泊车模式为车内泊车。
11.第二方面,本发明实施例还提供了一种自动泊车系统,包括:检测模块,获取模块和泊车模块;其中,所述检测模块,用于在目标车辆到达预设下车点时,对所述目标车辆的周围环境进行障碍物距离检测,得到所述目标车辆的左侧车身与左侧障碍物之间的第一距离,和得到所述目标车辆的尾部与尾部障碍物之间的第二距离;所述预设下车点为所述目标车辆在第一泊车路径上设置的能为驾驶员提供下车空间的参考点;所述获取模块,用于获取所述驾驶员的取物需求指令;所述泊车模块,用于基于所述第一距离、所述第二距离和所述取物需求指令,设定所述目标车辆的泊车模式,并基于所述泊车模式执行泊车操作。
12.第三方面,本发明实施例还提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法的步骤。
13.第四方面,本发明实施例还提供了一种具有处理器可执行的非易失的程序代码的计算机可读介质,所述程序代码使所述处理器执行上述第一方面所述方法。
14.本发明实施例提供了一种自动泊车方法和系统,通过提前检测车辆与车位周围障碍物之间的距离设定泊车模式,通过不同的泊车模式解决驾乘人员下车困难、刮擦车门和后备箱车门无法打开的技术问题。
附图说明
15.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1为本发明实施例提供的一种自动泊车方法的流程图;
17.图2为本发明实施例提供的一种自动泊车路线示意图;
18.图3为本发明实施例提供的另一种自动泊车路线示意图;
19.图4为本发明实施例提供的另一种自动泊车方法的流程图;
20.图5为本发明实施例提供的一种自动泊车系统的示意图;
21.图6为本发明实施例提供的一种泊车模块的示意图。
具体实施方式
22.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.实施例一:
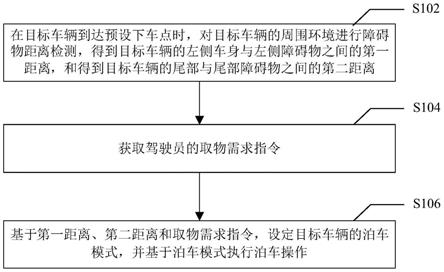
24.图1是根据本发明实施例提供的一种自动泊车方法的流程图。如图1所示,该方法具体包括如下步骤:
25.步骤s102,在目标车辆到达预设下车点时,对目标车辆的周围环境进行障碍物距离检测,得到目标车辆的左侧车身与左侧障碍物之间的第一距离,和得到目标车辆的尾部与尾部障碍物之间的第二距离;预设下车点为目标车辆在第一泊车路径上设置的能为驾驶员提供下车空间的参考点。
26.可选地,在本发明实施例中,通过目标车辆的左侧车身安装的超声波雷达,对左侧车身与左侧障碍物进行距离检测,得到第一距离;通过目标车辆的尾部安装的超声波雷达,对尾部与尾部障碍物进行距离检测,得到第二距离。
27.步骤s104,获取驾驶员的取物需求指令。
28.可选地,驾驶员的取物需求指令包括以下任一项:需要下车取物,不需要下车取物。需要说明的是,在本发明实施例中,下车取物指的是驾驶员下车走到目标车辆的尾部,打开后备箱取出后备箱中的物体。
29.步骤s106,基于第一距离、第二距离和取物需求指令,设定目标车辆的泊车模式,并基于泊车模式执行泊车操作。
30.可选地,泊车模式包括以下任一项:车外自动泊车和车内泊车。其中,车外自动泊车为驾驶员下车之后,在车外控制目标车辆内置的自动泊车模块执行自动泊车操作;车内泊车为驾驶员在车内控制目标车辆泊车。
31.本发明实施例提供了一种自动泊车方法,通过提前检测车辆与车位周围障碍物之间的距离设定泊车模式,通过不同的泊车模式解决驾乘人员下车困难、刮擦车门和后备箱车门无法打开的技术问题。
32.在本发明实施例中,在步骤s102之前还包括如下步骤:
33.步骤s11,在接收到目标车辆的泊车指令时,获取目标车辆相对于至少一个泊车位的坐标信息;
34.具体的,首先对目标车辆的四路环视相机进行标定,并设置目标车辆后轴为基准坐标系。
35.然后对目标车辆的四路环视相机获取的图像数据进行图像处理,并利用环视拼接融合算法,将处理后的图像数据拼接成目标平面图像;目标平面图像包括至少一个泊车位的图像信息;可选地,图像处理包括对目标车辆的四路环视相机获取的图像数据进行畸变校正和透视变换处理。
36.最后将目标平面图像输入到预设图像识别模型中,得到目标车辆相对于至少一个
泊车位的坐标信息。
37.步骤s12,基于目标车辆相对于目标泊车位的坐标信息,规划第一泊车路径,以使第一泊车路径经过预设下车点;目标泊车位为驾驶员在至少一个泊车位中确定的一个泊车位。
38.可选地,在本发明实施例中,驾驶员通过人机界面(human machine interface,hmi)进行泊车位选择。
39.步骤s13,控制目标车辆基于第一泊车路径行驶至预设下车点。
40.在本发明实施例中,若取物需求指令为不需要下车取物,则步骤s106包括如下步骤:
41.步骤s1061,判断第一距离是否小于第一预设阈值;如果是,则执行步骤s1062;如果否,则执行步骤s1063;其中,第一预设阈值根据目标车辆的车门开启的宽度进行设定;
42.步骤s1062,在驾驶员从预设下车点下车后,设定泊车模式为车外自动泊车;
43.步骤s1063,设定泊车模式为车内泊车。
44.具体的,图2为根据本发明实施例提供的一种自动泊车路线示意图。如图2所示,路径bcd为第一泊车路径,c点为预设下车点,d
left
为第一距离。首先控制目标车辆沿着第一泊车路径bcd行驶到预设下车点c点位置(以目标车辆的后轴为基准),然后对左侧障碍物进行距离检测得到第一距离d
left
;判断第一距离是否小于第一预设阈值,如果是,则驾驶员在目标车辆到达预设下车点c点时下车,设定泊车模式为车外自动泊车,使目标车辆继续沿第一泊车路径bcd泊入目标泊车位,这样就可以避免在打开车门下车时因为车辆侧面距离过小而导致的下车难和刮擦车门的技术问题。
45.在本发明实施例中,若取物需求指令为需要下车取物,则步骤s106包括如下步骤:
46.步骤s1064,基于第二距离和泊车距离,确定第三距离;泊车距离为下车点到目标泊车位的泊车点位之间的距离;第三距离为第二距离和泊车距离之差;
47.步骤s1065,判断第三距离是否小于第二预设阈值;如果是,则执行步骤s1066-步骤s1067;如果否,则执行步骤s1068-步骤s1070;其中,第二预设阈值根据目标车辆的后备箱左右开启的最大长度设置;
48.步骤s1066,规划目标车辆的第二泊车路径,以使第二泊车路径经过预设取物点;预设取物点为能为驾驶员提供下车取物空间的参考点位;
49.步骤s1067,控制目标车辆基于第二泊车路径行驶至预设取物点,并在驾驶员下车取物后,设定泊车模式为车外自动泊车;
50.步骤s1068,判断第一距离是否小于第一预设阈值;如果是,则执行步骤s1069;如果否,则执行步骤s1070;
51.步骤s1069,在驾驶员从预设下车点下车后,设定泊车模式为车外自动泊车;
52.步骤s1070,设定泊车模式为车内泊车。
53.具体的,图3为根据本发明实施例提供的另一种自动泊车路线示意图。如图3所示,路线c到e,然后e到c,最后由c到d为第二泊车路径;e点为预设取物点。若驾驶员需要下车取物,则首选控制目标车辆基于第一泊车路径行驶到预设下车点c点位置,然后对目标车辆的尾部与车辆后面的障碍物之间进行距离检测,得到第二距离;然后根据泊车距离(图3所示的c点到d点之间的距离)得到第三距离(即图3所示的d
tail
);判断第三距离是否小于第二预
设阈值;如果是,则说明目标车辆泊入目标泊车位后,后备箱无法打开,因此,需要提醒驾驶员提前下车取物。
54.具体的,根据规划的第二泊车路径,将目标车辆行驶到预设取物点e点,然后驾驶员下车,打开后备箱取物;在驾驶员取物完成之后,在车外设置泊车模式为车外自动泊车,以使目标车辆内置的自动泊车模块控制目标车辆继续沿着第二泊车路径进入目标泊车位,完成泊车。本发明实施例通过上述泊车方法,可以有效避免了在泊车完成之后,因此车辆尾部障碍物的阻碍导致的后备箱无法打开的技术问题。
55.实施例二:
56.图4为根据本发明实施例提供的另一种自动泊车方法的流程图。如图4所示,该方法具体包括如下步骤:
57.s1.整车四路环视相机进行标定,设置车辆后轴为基准坐标系。
58.s2.通过四路环视相机获取的图像数据进行畸变矫正和透视变换,然后利用环视拼接融合算法拼接为一张平面图像。
59.s3.将平面图像输入到图像识别模型组件中,输出每个车位对应的车位框以及车位的坐标信息。
60.s4.通过hmi进行车位选择。
61.s5.根据车辆当前的位置和目标车位规划至少一个可泊入路径。
62.s6.设置垂直车位的第一泊车路径上的c点为下车点,设置第二泊车路径上的e点为取物点。其中,c点便于执行车外一键泊入操作,e点方便取物操作。具体点位设置如上述实施例一种的图2和图3所示。
63.s7.当车辆到达下车点时进行障碍物距离检测,障碍物距离检测使用车身尾部的超声波雷达和左侧的超声波雷达。
64.s8.根据车身左侧超声波雷达检测车辆离障碍物的距离d
left
,比较d
left
和设置相邻左侧车位阈值大小,相邻左侧车位阈值根据车门开启的宽度衡量。
65.s9.根据根据车身尾部超声波雷达检测车辆离障碍物的距离d
obj
,再加上超声波雷达安装位置到车辆后轴中心点距离d
rear
得到d
total
,d
tail
为车辆尾部到障碍物的距离,根据cd两点的坐标可以得到cd的距离l,即d
tail
=d
total-l
–drear
,库位后方障碍物阈值设置根据后备箱左右开启的最大长度设置。
66.s10.根据检测的距离和阈值判断d
tail
是否不满足阈值的需求,若不满足则询问驾乘人员是否进行先下车取物,如果需要进行取物,则需要规划一条ce路径车辆到达取物点进行取物。
67.s11.完成取物后进行车外一键泊车,完成两段路径ec和cd的泊入。
68.s12.如果不需要取物则判断d
left
距离是否满足阈值的需求,如果不满足则完成驾乘人员在下车点的下车操作,然后完成cd路径的车外一键泊车。
69.s13.如果满足设置的阈值条件则进行车内泊入。
70.由以上描述可知,本发明实施例提供的一种自动泊车方法,首先通过四路环视相机对车辆与车位的坐标进行标定,然后利用车辆自带的超声波雷达提前检测车辆与车位周围障碍物之间的距离,最后根据检测结果以及驾乘人员的需求设定泊车模式,通过不同的泊车模式解决驾乘人员在不同状况下的下车困难、刮擦车门和后备箱车门无法打开的技术
问题。
71.实施例三:
72.图5是根据本发明实施例提供的一种自动泊车系统的示意图。如图5所示,该系统包括:检测模块10,获取模块20和泊车模块30。
73.具体的,检测模块10,用于在目标车辆到达预设下车点时,对目标车辆的周围环境进行障碍物距离检测,得到目标车辆的左侧车身与左侧障碍物之间的第一距离,和得到目标车辆的尾部与尾部障碍物之间的第二距离;预设下车点为目标车辆在第一泊车路径上设置的能为驾驶员提供下车空间的参考点。
74.获取模块20,用于获取驾驶员的取物需求指令。
75.泊车模块30,用于基于第一距离、第二距离和取物需求指令,设定目标车辆的泊车模式,并基于泊车模式执行泊车操作。
76.本发明实施例提供了一种自动泊车系统,通过提前检测车辆与车位周围障碍物之间的距离设定泊车模式,通过不同的泊车模式解决驾乘人员下车困难、刮擦车门和后备箱车门无法打开的技术问题。
77.图6是根据本发明实施例提供的一种泊车模块的示意图。如图6所示,泊车模块30还包括:第一泊车单元31,第二泊车单元32和第三泊车单元33。
78.具体的,第一泊车单元31,用于若取物需求指令为不需要下车取物,则基于第一距离、第二距离和取物需求指令,设定目标车辆的泊车模式,包括:判断第一距离是否小于第一预设阈值;如果是,则在驾驶员从预设下车点下车后,设定泊车模式为车外自动泊车;如果否,则设定泊车模式为车内泊车。
79.第二泊车单元32,用于若取物需求指令为需要下车取物,则基于第一距离、第二距离和取物需求指令,设定目标车辆的泊车模式,包括:基于第二距离和泊车距离,确定第三距离;泊车距离为下车点到目标泊车位的泊车点位之间的距离;第三距离为第二距离和泊车距离之差;判断第三距离是否小于第二预设阈值;如果是,则规划目标车辆的第二泊车路径,以使第二泊车路径经过预设取物点;预设取物点为能为驾驶员提供下车取物空间的参考点位;控制目标车辆基于第二泊车路径行驶至预设取物点,并在驾驶员下车取物后,设定泊车模式为车外自动泊车。
80.第三泊车单元33,用于如果第三距离大于或等于第二预设阈值,则判断第一距离是否小于第一预设阈值;如果是,则在驾驶员从预设下车点下车后,设定泊车模式为车外自动泊车;如果否,则设定泊车模式为车内泊车。
81.本发明实施例还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述实施例一中的方法的步骤。
82.本发明实施例还提供了一种具有处理器可执行的非易失的程序代码的计算机可读介质,程序代码使处理器执行上述实施例一中的方法。
83.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术
方案的范围。