1.本发明涉及车辆控制领域,尤其涉及一种用于自动泊车测试的泊车数据处理方法。
背景技术:
2.自动泊车辅助系统(apa),是指在车辆泊车时,自动检测泊车空间并为驾驶员提供泊车指示和/或方向控制等辅助功能。而智能驾驶汽车在自动泊车测试(如泊入/泊出测试、泊车姿态测量、泊车路径测试分析,揉库次数测试分析等)时,需要实时采集汽车上任意点的实时位置进而生成整个移动过程中车辆的轨迹线、轮廓包络、行驶姿态及与障碍物相对距离等参数。
3.目前通常采用gps/差分基站测量和手工测量,以gps/差分基站测量为例,需配合一个或多个固定基站,将车辆、障碍物、周围环境等建立在一个测试坐标系中,通过无线电测距技术、通信技术,实时绘制出各点的坐标位置,进而生成各点的移动轨迹及移动速度、两点相对距离、整车轮廓包络等信息。由此带来了以下缺点:需在固定的开放的场地安装固定基站,无法在地下停车场、高层建筑附近、遮雨棚等影响gps信号的区域进行测试;而手工测量的缺陷也显而易见,其无法实时绘制行驶轨迹、轮廓包络,距离采集速度慢、效率低、误差大。
4.综上可见,gps/差分基站测量和手工测量均无法实施分析泊车过程中车辆的行驶轨迹,也无法在回放过程中针对测试场景为采集的数据新增变量并分析。
技术实现要素:
5.鉴于上述,本发明旨在提供一种用于自动泊车测试的泊车数据处理方法,以解决现有泊车测试数据处理方式的问题。
6.本发明采用的技术方案如下:
7.一种用于自动泊车测试的泊车数据处理方法,其中包括:
8.为测试车辆配置测试系统,所述测试系统包括控制主机、上位机、双gps定位装置、惯导装置以及千寻差分定位装置;
9.利用双gps定位装置中的主天线,在上位机中将车位信息与预设的坐标系融合;
10.以双gps定位装置中的主天线为基准,在上位机中将测试车辆的轮廓与所述坐标系中的车位融合;
11.利用双gps定位装置中的主天线,在上位机中将测试车辆及障碍物的信息与所述坐标系融合;
12.由控制主机控制测试车辆执行自动泊车操作;
13.在泊车测试过程中,通过上位机实时显示基于所述坐标系的泊车信息,并结合卡尔曼滤波器获取目标测试数据。
14.在其中至少一种可能的实现方式中,所述在上位机中将车位信息与预设坐标系融
合包括:将目标车位通过点、线、面的关系建立在上位机中预设的坐标系上。
15.在其中至少一种可能的实现方式中,所述在上位机中将测试车辆的轮廓与所述坐标系中的车位融合包括:
16.设置若干个测试车辆的特征点;
17.根据所述特征点,绘制测试车辆的轮廓,并将所述轮廓置于所述坐标系下的车位之中。
18.在其中至少一种可能的实现方式中,所述在上位机中将测试车辆及障碍物的信息与所述坐标系融合包括:将测试车辆及障碍物通过点、线、面的关系建立在所述坐标系上。
19.在其中至少一种可能的实现方式中,所述泊车信息包括如下多种信息组合:泊车速度、测试车辆与障碍物的间距、测试车辆位姿、泊车角度、泊车路径以及揉库次数。
20.在其中至少一种可能的实现方式中,所述目标测试数据包括:距离值和/或角度值。
21.在其中至少一种可能的实现方式中,所述距离值包括:两个移动对象之间的距离数据,或者一个移动对象与一个固定对象的距离数据。
22.在其中至少一种可能的实现方式中,所述距离值还包括:以一个对象为基准计算出的两个对象之间的x向距离和y向距离。
23.在其中至少一种可能的实现方式中,所述角度值包括:两个对象之间的航向偏差。
24.在其中至少一种可能的实现方式中,所述数据处理方法还包括:在回放所述目标测试数据时,基于所述泊车信息,重新定义测试数据;所述重新定义测试数据用于分析并优化泊车路径。
25.本发明的主要设计构思在于,通过测试车辆搭载专门设定的测试系统,将目标车位、测试车辆、障碍物等对象的位置按1:1的原则建立在相同坐标系中,且在测试车辆泊车过程中实时显示并记录泊车测试所需的测试数据,从而简单、高效、精准地对泊车系统路径规划、揉库次数以及停库位姿提供分析及优化的数据基础,为产品开发提供可靠依据。
26.进一步地,可在之后的测试数据回放过程中对获取到的测试数据进行二次定义。
附图说明
27.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
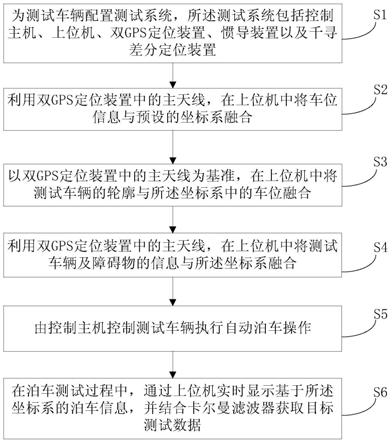
28.图1为本发明实施例提供的用于自动泊车测试的泊车数据处理方法的流程图。
具体实施方式
29.下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
30.本发明提出了一种用于自动泊车测试的泊车数据处理方法的实施例,具体来说,如图1所示,其中包括:
31.步骤s1、为测试车辆配置测试系统,所述测试系统包括控制主机、上位机、双gps定位装置、惯导装置以及千寻差分定位装置;
32.这里需特别指出的是,本发明利用千寻基站提供高精度定位,可减少固定基站数量,即,可实现厘米级高精度定位且不需要配合固定基站。在实际操作中,千寻基站代替原有的多个固定基站,定位范围较广,定位精度收外界干扰小;上述控制主机作为本方法实施例的控制主体,优选融合6轴高精度imu信号及高精度gnss/室内定位无线信号,从而可完成单车端/单目标物高精度位姿测,并可精确标定车辆外形多个特征点、imu坐标原点及gnss参考天线中心间的杆臂值,进而辅助本方案依靠多目标物通讯及统一坐标系(主车坐标系)下进行计算,得到多目标间的位姿关系;上述惯导装置则可精准输出加速度、角速度、航向角、横摆角、俯仰角等信息,并可通过卡尔曼滤波获取精确位姿信息。
33.步骤s2、利用双gps定位装置中的主天线,在上位机中将车位信息与预设的坐标系融合;
34.步骤s3、以双gps定位装置中的主天线为基准,在上位机中将测试车辆的轮廓与所述坐标系中的车位融合;
35.步骤s4、利用双gps定位装置中的主天线,在上位机中将测试车辆及障碍物的信息与所述坐标系融合;
36.步骤s5、由控制主机控制测试车辆执行自动泊车操作;
37.步骤s6、在泊车测试过程中,通过上位机实时显示基于所述坐标系的泊车信息,并结合卡尔曼滤波器获取目标测试数据。
38.进一步地,所述在上位机中将车位信息与预设坐标系融合包括:将目标车位通过点、线、面的关系建立在上位机中预设的坐标系上。
39.进一步地,所述在上位机中将测试车辆的轮廓与所述坐标系中的车位融合包括:
40.设置若干个测试车辆的特征点;
41.根据所述特征点,绘制测试车辆的轮廓,并将所述轮廓置于所述坐标系下的车位之中。
42.进一步地,所述在上位机中将测试车辆及障碍物的信息与所述坐标系融合包括:将测试车辆及障碍物通过点、线、面的关系建立在所述坐标系上。
43.进一步地,所述泊车信息包括如下多种信息组合:泊车速度、测试车辆与障碍物的间距、测试车辆位姿、泊车角度、泊车路径以及揉库次数。
44.进一步地,所述目标测试数据包括:距离值和/或角度值。
45.进一步地,所述距离值包括:两个移动对象之间的距离数据,或者一个移动对象与一个固定对象的距离数据。
46.进一步地,所述距离值还包括:以一个对象为基准计算出的两个对象之间的x向距离和y向距离。
47.进一步地,所述角度值包括:两个对象之间的航向偏差。
48.进一步地,所述数据处理方法还包括:在回放所述目标测试数据时,基于所述泊车信息,重新定义测试数据;所述重新定义测试数据用于分析并优化泊车路径。
49.综上所述,本发明的主要设计构思在于,通过测试车辆搭载专门设定的测试系统,将目标车位、测试车辆、障碍物等对象的位置按1:1的原则建立在相同坐标系中,且在测试车辆泊车过程中实时显示并记录泊车测试所需的测试数据,从而简单、高效、精准地对泊车系统路径规划、揉库次数以及停库位姿提供分析及优化的数据基础,为产品开发提供可靠
依据。
50.本发明实施例中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示单独存在a、同时存在a和b、单独存在b的情况。其中a,b可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项”及其类似表达,是指的这些项中的任意组合,包括单项或复数项的任意组合。例如,a,b和c中的至少一项可以表示:a,b,c,a和b,a和c,b和c或a和b和c,其中a,b,c可以是单个,也可以是多个。
51.以上依据图式所示的实施例详细说明了本发明的构造、特征及作用效果,但以上仅为本发明的较佳实施例,需要言明的是,上述实施例及其优选方式所涉及的技术特征,本领域技术人员可以在不脱离、不改变本发明的设计思路以及技术效果的前提下,合理地组合搭配成多种等效方案;因此,本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。