1.本实用新型涉及儿童滑板的技术领域,特别是一种动力可切换前轮动力可手摇式儿童滑板的技术领域。
背景技术:
2.现有的滑板是通过脚蹬地面提供动力驱动滑板前进,最早的儿童滑板是不带手扶把手的,因为儿童平衡能力差,体力小,蹬地过程中不容易保持平衡,容易摔倒,导致不容易学会,为了能够使低龄儿童更容易上手,目前很多儿童滑板都增加了固定在滑板体上的扶手,现有的儿童滑板仅能通过脚蹬地面锻炼儿童的下肢力量,但并不能很好的通过伸展锻炼手臂力量,同时当儿童长时间用脚蹬地,腿部容易疲劳,儿童无法通过滑板车行进较长的距离,儿童与大人外出散步或逛街时滑板无法很好成为儿童的代步工具,很多孩子滑滑板滑行一段距离后,就需要大人抱着。
3.专利号为cn02203742.x实用新型公开了一种新型滑板车,本技术利用一个摇杆往复带动齿条运动,通过在齿条两侧分别设置一个传动方向不同的左右离合器,实现将摇杆的推、拉动能传递给后轮,该专利中由于转向和手动力输入不能在一个轮上,所以只能通过复杂的结构将动力传送到后轮上,该专利保护的技术方案,结构复杂,滑板车重量大,不适合儿童使用;该专利之所以没有将动能输入传递给前轮,因为没有解决单轮兼具手动动力输入与手动转向的问题。同时该专利在使用过程中操作困难,当手动前后摇动摇杆时,无法转向,即使强制转向,通过将摇杆向左或右侧拉,这时滑板车左右平衡被打破,容易向一侧倾倒。滑板车手动动力输入时,只有始终保持动力向正后方,才能使动力输入不影响滑板车的左右平衡;因为该专利摇杆兼具手动力输入和转向的功能,必须要保持摇杆的可运动性,所以该专利的技术方案也仅能输入手动力,无法手动力和脚动力切换输入,所以手动动力输入机构和转向很难均用手完成,最大的问题是输入动力时,无法控制转向,所以现有的滑板前轮仅能当做转向轮。
4.该专利由于摇杆始终相对车身是可以转动的,该专利摇杆前后转动时,需要身体不断调整重心适应反作用力,在遇到急停或者下坡加速时,儿童无相对滑板体固定的把手可以依靠,来稳定重心,最终导致身体在惯性作用下容易向前或向后倾倒,所以该专利保护的技术方案不适合儿童生活中在各种生活环境中的使用,由于儿童滑滑板技能普遍较弱,所以这种无可依靠的物体保持平衡的情况容易导致儿童摔倒。
5.申请号为cn201821237663.5实用新型专利公开了一种滑板车的助力装置,该专利的申请文件中记载的技术效果是能够延长用脚蹬地的时间间隔的时间,增加滑行乐趣,延长滑行者的出现疲劳感的时间,以及增加身体的协调能力,尤其是手脚的配合能力。
6.该专利通过将快速扳手的换向旋钮通过拉线与所述滑板车的把手上的控制装置连接和将离合装置的拉线与所述滑板车的把手上的控制装置连接,使用过程中,用脚踏快速扳手,将动能储存在发条中,通过手动控制离合装置,实现动力的输入和输出,从而实现手脚的配合能力,操作非常复杂,不适合儿童使用,尤其使低龄儿童。
7.该专利的工作过程如下(原文):用脚转动快速扳手6,通过快速扳手6带动齿轮轴3转动,通过齿轮轴3带动离合装置5中的发条储能,当能力储存完毕后,通过控制装置带动拉线8运动,通过拉线带动离合块5-2运动,通过离合块5-2绕安装轴5-5转动,使离合块5-2绕与离合齿轮5-1啮合,从而对离合齿轮5-1进行固定,防止发条的动力输送到齿轮轴3上,滑板车滑行过程中,通过发条将动能传动给齿轮2,通过齿轮2将动能传送给飞轮1,通过飞轮1带动滑板车前进。
8.该专利通过先用脚蹬快速扳手,利用蓄能装置储能,动能储存后通过脚蹬地和释放存储的动能双重动力输出可以够延长用脚蹬地的时间间隔的时间,但是并不能延长滑行者的出现疲劳感的时间,因为动能的储存也是需要人体做功完成的,因为动力的输出与输入是相等的,滑行多远的距离,便需要输入相应的动力,所以该专利并不能达到延长滑行者的出现疲劳感的时间,提前用脚踩快速扳手储存的动能也是需要消耗人体能量的。
9.该专利蓄能装置结构复杂,导致滑板车成本较高。传统的滑板车脚蹬地面的过程中,滑板和人体会产生较快的初速度,本身人体和滑板惯性可以储存动能,增加额外的储能部件会导致结构复杂,较多的增加滑板的成本。同时该专利并不能实现通过胳膊的伸展达到锻炼手臂肌肉的目的,同时仅能用脚提供动力,没有解决手动动力输入和转向矛盾的问题。
10.人平时无论是走路还是跑步只要移动,脚步、腿部在身体自身重力作用下可以得到负载锻炼,但是人的胳膊,如果不做劳动强度较大的工作,生活活动中很难得到有负载锻炼,所以市场上需要一种能够锻炼儿童手臂力量的滑板。
技术实现要素:
11.本实用新型的目的就是解决现有技术中的问题,提出一种动力可切换前轮动力可手摇式儿童滑板,能够利用摇杆手动输入动力,同时去除摇杆的转向功能,转向和手动力输入互相不干涉。
12.为实现上述目的,本实用新型提出了一种动力可切换前轮动力可手摇式儿童滑板,包括重力滑板板体,重力转向轮,滚地动力单轮,轮轴、手动摇杆和单向传动轮;
13.所述重力滑板板体前端设置有轮轴,所述轮轴上设置有滚地动力单轮,所述滚地动力单轮位于重力滑板板体左右方向的中部;
14.所述单向传动轮包括用于输入手动摇杆动能的主动件和用于带动滚地动力单轮向前转动的被动件,所述主动件和被动件单向传动连接;
15.所述手动摇杆固设在主动件上,所述被动件固设在轮轴上或固定在滚地动力单轮侧部,
16.所述重力滑板板体后端设置有重力转向轮。
17.作为优选,所述轮轴与重力滑板板体上之间设置有供轮轴转动的转动间隙,所述滚地动力单轮固设在轮轴上,所述被动件固设在轮轴上或固定在滚地动力单轮侧部。
18.作为优选,所述轮轴固设在重力滑板板体上,所述滚地动力单轮与轮轴之间设置有供滚地动力单轮转动的间隙,所述被动件固定在滚地动力单轮侧部
19.作为优选,所述单向传动轮的类型是单向轴承或者棘轮机构。
20.作为优选,还包括用于固定连接手动摇杆和重力滑板板体的脚手动力输入切换机
构,所述脚手动力输入切换机构设置在手动摇杆和重力滑板板体之间。
21.作为优选,所述脚手动力输入切换机构包括定位销和定位孔,所述手动摇杆和重力滑板板体上分别设置有定位孔,所述定位销插在手动摇杆和重力滑板板体上的定位孔中。
22.作为优选,所述重力转向轮包括轮架、轮体和竖向转向轴,所述竖向转向轴上端向后倾斜插在重力滑板板体上,另一端插在轮架上,所述轮架两侧分别设置有轮体。
23.作为优选,所述手动摇杆侧部横向设置有把手。
24.作为优选,还包括手动拉绳即时定位机构,所述手动拉绳即时定位机构包括、手动拉绳把手、定位板、卡齿和拉绳,所述卡齿固定设置在重力滑板板体上,所述定位板中部通过销轴铰接在手动摇杆上,所述手动拉绳把手固设在把手上,所述定位板一端插在卡齿上,另一端通过拉绳与手动拉绳把手传动连接。
25.作为优选,还包括用于通过与地面摩擦对滑板减速的刹车板,所述刹车板一端固设在手动摇杆上,另一端位于手动摇杆前侧或后侧。
26.本实用新型的有益效果:
27.1、通过重力转向轮和滚地动力单轮配合实现滑板的转向和手动力输入分离,将重力转向轮设置在滑板后部,将滚地动力单轮设置在前部,利用手动摇杆驱动滚地动力单轮运动,滑板转向和手动力输入各自独立,互相不干涉;
28.2、本技术滑板通过脚手动力输入切换机构可以切换滑板动力输入模式,可以对人体上肢和下肢体进行锻炼;通过将手动拉绳即时定位机构应用在滑板上,能够降低滑板车急停导致的人向前倾倒问题;通过将刹车板与手动摇杆配合减速,使减速操作更加简单。
附图说明
29.本实用新型上述的以及其他的特征、性质和优势将通过下面的结合附图和实施例的描述而变得更加明显,在附图中相同的附图标记始终表示相同的特征,其中:
30.图1是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的主视图;
31.图2是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的右视图;
32.图3是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的立体示意图;
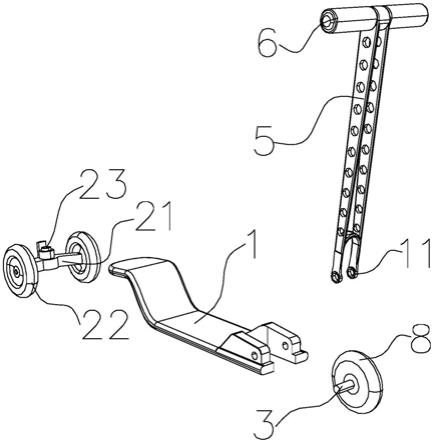
33.图4是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的分解示意图;
34.图5是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的带有定位销的立体示意图;
35.图6是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的带有定位销的分解示意图;
36.图7是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的双手动摇杆的立体示意图;
37.图8是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的双手动摇杆的分解示意图;
38.图9是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的带有手动拉绳即时定位机构的立体示意图;
39.图10是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的带有手动拉绳
即时定位机构的分解示意图;
40.图11是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的带有刹车板的立体示意图;
41.图12是本实用新型一种动力可切换前轮动力可手摇式儿童滑板的带有刹车板的分解示意图。
42.图中:1-重力滑板板体、2-重力转向轮、21-轮架、22-轮体、23-竖向转向轴、3-轮轴、5-手动摇杆、6-把手、8-滚地动力单轮、10-定位销、11-单向传动轮、12-手动拉绳即时定位机构、121-手动拉绳把手、122-定位板、123-卡齿、13-刹车板。
具体实施方式
43.参阅图1-图3,本实用新型一种动力可切换前轮动力可手摇式儿童滑板,包括重力滑板板体1,重力转向轮2,滚地动力单轮8,轮轴3、手动摇杆5和单向传动轮11;
44.所述重力滑板板体1前端设置有轮轴3,因为滑板用于向前行驶,所以重力滑板板体前端设置有轮轴暗含了轮轴是左右方向设置,轮轴的设置方式可以有多种,一种是在重力滑板板体前端下部左右两侧设置向下延伸的轮轴架,轮轴架可以是板状,也可以是杆状,将轮轴两端分别穿过两侧的轮轴架;也可以在重力滑板板体前端设置用于容纳滚地动力单轮的缺口,将轮轴两端分别穿过缺口两侧的重力滑板板体,或者在缺口两侧的重力滑板板体下部设置凹槽,将轮轴两端置于凹槽中,也可以在缺口两侧设置向上或向下延伸的轮轴架,轮轴架可以是板状,也可以是杆状,将轮轴两端分别穿过两侧的轮轴架达到限位轮轴两端的目的,所述轮轴3上设置有滚地动力单轮8,所述滚地动力单轮8位于重力滑板板体1左右方向的中部,滚地动力单轮8相对轮轴3可以转动,或者轮轴3相对重力滑板板体1可以转动,最终的只要滚地动力单轮8可以相对重力滑板板体1转动即可,为了能够使滑板转向;通过使滚地动力单轮8位于重力滑板板体1左右方向的中部,可以使重力滑板板体1顺畅的左右倾斜,从而通过重力转向轮2实现滑板的转向目的;
45.所述单向传动轮11包括用于输入手动摇杆动能的主动件和用于带动滚地动力单轮向前转动的被动件,所述主动件和被动件单向传动连接,所述单向传动轮11的类型是单向轴承或者棘轮机构,最终的目的是通过手动前后摇动手动摇杆5,通过手动摇杆5带动滚地动力单轮8单向向前转动;
46.为了达到通过手动摇杆5带动滚地动力单轮8单向向前转动的目的,滚地动力单轮8、轮轴3、重力滑板板体1和被动件三者有如下具体实施方式:第一种是所述轮轴固设在重力滑板板体上,所述滚地动力单轮与轮轴之间设置有供滚地动力单轮转动的间隙,所述被动件固定在滚地动力单轮侧部,具体来讲就是轮轴3固定在重力滑板板体1上,为了使滚地动力单轮8可以向前滚动,则需要使滚地动力单轮8在轮轴3上相对轮轴3可以转动,将被动件固定在滚地动力单轮8侧部,通过主动件往复运动带动被动件单向向前转动,通过被动件带动滚地动力单轮8单向向前运动;第二种是轮轴可转动设置在重力滑板板体1上,滚地动力单轮8可转动设置在轮轴3上,为了使滚地动力单轮8可以向前滚动,将被动件固定在滚地动力单轮8上,通过主动件往复运动带动被动件单向向前转动,通过被动件带动滚地动力单轮8单向向前运动;第三种是所述轮轴与重力滑板板体上之间设置有供轮轴转动的转动间隙,所述滚地动力单轮固设在轮轴上,所述被动件固设在轮轴上或固定在滚地动力单轮侧
部,具体来讲就是轮轴可转动设置在重力滑板板体1上,滚地动力单轮8固定设置在轮轴3上,为了使滚地动力单轮8可以向前滚动,将被动件固定在滚地动力单轮8或者固定在轮轴3上,通过主动件往复运动带动被动件单向向前转动,通过被动件带动滚地动力单轮8和轮轴3单向向前运动。
47.所述手动摇杆5固设在主动件上,所述被动件固设在轮轴上或固定在滚地动力单轮8侧部,通过将手动摇杆5的往复转动动能传递给主动件,通过主动件将一个转动方向的动能传递给被动件,所述被动件带动轮轴3转动,再通过轮轴3带动滚地动力单轮8转动,或者直接通过被动件带动滚地动力单轮8转动。
48.所述单向传动轮11的数量可以是一个也可以是两个,当然也可以是多个,对应的手动摇杆5的数量是一个或者两个或者多个,如图1-3所示,当手动摇杆5的数量为一个时,需要儿童双手握住手动摇杆5往复转动,当手动摇杆5的数量为两个时,如图7-8所示,儿童通过两个手分别握住两个手动摇杆5往复转动,当手动摇杆5的数量为是多个时,可以使多个儿童同时玩一个滑板,为了方便手握可以在手动摇杆5侧部加上把手6;当单向传动轮11的数量为两个时,两个单向传动轮11可以设置在滚地动力单轮8一侧,也可以设置在滚地动力单轮8两侧,手动摇杆5可以通过焊接固定在主动件,被动件可以通过焊接或者紧密配合的方式固定在轮轴上或焊接固定在滚地动力单轮8上,
49.所述重力滑板板体1后端设置有重力转向轮2,重力转向轮2转向过程中,人体通过调节重心,使重力滑板板体1向需要转动的方向倾斜,重力转向轮2则发生旋转,重力转向轮2用现有的滑板的滑轮转向桥技术即可。
50.本实施例基于上述实施方式,单向传动轮11的目的是实现单向传动,所以单向传动轮11的内部结构可以不止一种,如图4和图8所示,所述单向传动轮11的类型可以是单向轴承,也可以是棘轮机构,当单向传动轮11的类型是单向轴承时,被动件和主动件分别指单向轴承的内外圈;当单向传动轮11的类型是棘轮机构时,被动件和主动件分别指棘轮体22和棘爪,本儿童滑板仅通过单向传动轮11即可实现手动力的动力输入和兼顾转向功能,省去了复杂的传动结构,结构简单。
51.本实施例基于上述实施方式,如图5和图6所示,为了能够使滑板实现脚动力和手动力输入方式的切换,可以加入用于固定连接手动摇杆5和重力滑板板体1的脚手动力输入切换机构,所述脚手动力输入切换机构设置在手动摇杆5和重力滑板板体1之间,通过脚手动力输入切换机构可以将手动摇杆5和重力滑板板体1固定连接,这时的滑板与传统的滑板功能相同,通过用脚蹬地作为前进动力;当通过调节脚手动力输入切换机构使手动摇杆5和重力滑板板体1分离时,可以通过手动前后转动手动摇杆5作为动力,驱动滑板运动,当手动摇杆5和重力滑板板体1相对可以转动时,是无法用脚蹬地实现驱动的,因为手动摇杆5可以转动,儿童无法保持重心平衡,本技术方案中儿童在玩滑板的过程中,既能锻炼儿童的平衡能力,同时可以对儿童的上肢和下肢肌肉分别进行锻炼,解决了传统的儿童滑板仅能锻炼下肢,导致的使上下肢体不匀称的问题。所述脚手动力输入切换机构包括定位销10和定位孔,所述手动摇杆5和重力滑板板体1上分别设置有定位孔,所述定位销10插在手动摇杆5和重力滑板板体1上的定位孔中,设置脚手动力输入切换机构的最终目的是对手动摇杆5和重力滑板板体1进行固定连接,脚手动力输入切换机构也可以是扎带,通过扎带将手动摇杆5和重力滑板板体1固定,能够实现相同的技术效果。
52.如图4所示,所述重力转向轮2包括轮架21、轮体22和竖向转向轴23,所述竖向转向轴23上端向后倾斜插在重力滑板板体1上,另一端插在轮架21上,所述轮架21两侧分别设置有轮体22,当重力滑板板体1两侧受到的压力不同而倾斜时,轮架21会绕竖向转向轴23转动,使两个轮体22方向改变。
53.如图1-4所示,所述手动摇杆5侧部横向设置有把手6,通过在手动摇杆5侧部横向设置把手6,可以使把手6握着更加舒服,当手动摇杆5的数量为1个时,则在手动摇杆5的两侧分别设置把手6,当手动摇杆5的数量为2个时,则在两个手动摇杆5的背离侧分别设置把手6。
54.本实施例基于上述实施方式,如图9-10所示,当路面不平导致滑板急停或者较快降速时,为了使手动摇杆5与重力滑板板体1相对静止固定,使儿童可以依靠手动摇杆5维持重心稳定,可以加入手动拉绳即时定位机构12,所述手动拉绳即时定位机构12包括、手动拉绳把手121、定位板122、卡齿123和拉绳,所述卡齿123固定设置在重力滑板板体1上,所述定位板122中部通过销轴铰接在手动摇杆5上,所述手动拉绳把手121固设在把手6上,所述定位板122一端插在卡齿123上,另一端通过拉绳与手动拉绳把手121传动连接,通过手动拉绳把手121拉动拉绳,通过拉绳带动定位板122转动,使定位板122卡在卡齿123中,从而使使手动摇杆5与重力滑板板体1相对静止固定,滑板滑行过程中,利用弹簧弹力或者定位板122一端的重力作用,使定位板122与卡齿123分离,从而可以顺畅的滑滑板
55.本实施例基于上述实施方式,如图11-12所示,为了使滑板能够在需要时人为控制减速,可以加入通过与地面摩擦对滑板减速的刹车板13,所述刹车板13一端固设在手动摇杆上,另一端位于手动摇杆5前侧或后侧,通过转动手动摇杆5使刹车板13与地面接触摩擦,从而增加滑板阻力,使滑板降速,手动摇杆5在设定范围内转动时刹车板不与地面接触,只有当手动摇杆转动超过设定范围,刹车板才会与地面接触,手动摇杆设定的转动角度可以是往复转动30度,转动超过30度后,刹车板才会与地面接触,通过将刹车板与手动摇杆配合减速,使减速操作更加简单,同时相对于传统滑板减速机构更加简单。
56.本实用新型工作过程:
57.本实用新型一种动力可切换前轮动力可手摇式儿童滑板在工作过程中,当滑板需要用脚蹬地作为输入动力时,将定位销10插在手动摇杆5和重力滑板板体1上的定位孔中,使手动摇杆5和重力滑板板体1相对固定,儿童手扶手动摇杆5上的把手6,即可用脚蹬地实现动力的输入,驱动滑板前进;当滑板需要手动输入动力时,将定位销10从定位孔中拔出,儿童双脚站在重力滑板板体1上,通过用手前后往复转动手动摇杆5运动,通过手动摇杆5带动单向传动轮11转动,单向传动轮11将手动摇杆5一个方向的动能传递给滚地动力单轮8,通过滚地动力单轮8带动滑板运动,当需要转向时,通过调节人体重心,使重力滑板板体1左右发生倾斜,重力转向轮2会发生倾斜,进而实现转向的目的。当遇到不平整的地面时,滑板车可能会急停或者快速减速,人体在惯性作用下会向前运动,人手通过手动拉绳把手121拉动拉绳,通过手动拉绳把手121拉动拉绳,通过拉绳带动定位板122转动,使定位板122卡在卡齿123中,从而使使手动摇杆5与重力滑板板体1相对静止固定,滑板滑行过程中,利用弹簧弹力或者定位板122一端的重力作用,使定位板122与卡齿123分离,从而可以顺畅的滑滑板。
58.本技术解决了如下技术问题:能够利用摇杆手动输入动力,同时去除摇杆的转向
功能,转向和手动力输入互相不干涉,同时克服了现有的滑板动能输入单一问题;同时解决了现有的手动滑板在不平整的地面,由于滑板的摇杆无法及时固定导致的人体向前倾倒的问题。
59.本实用新型一种动力可切换前轮动力可手摇式儿童滑板,通过重力转向轮和滚地动力单轮配合实现滑板的转向和手动力输入分离,将重力转向轮设置在滑板后部,将滚地动力单轮设置在前部,利用手动摇杆驱动滚地动力单轮运动,使滑板转向和手动力输入各自独立,互相不干涉,操作更加容易,滑板车稳定性更好,本技术的传动结构简单,制造成本低,同时整车轻便,适合儿童使用;通过将脚手动力输入切换机构应用在滑板车上,通过简单调节,可以切换滑板动力输入模式,既可以手动输入动力,也可以脚蹬地输入动力,可以对人体,上肢和下肢体进行轮流锻炼;通过将手动拉绳即时定位机构12应用在滑板上,滑板平衡性好,能够降低滑板车急停导致的人向前倾倒问题,通过将单向传动轮11和重力转向轮2设置在滑板的前后端,通过将手动动力输送至设置在前部的单向传动轮11上,使传动结构简单,同时不影响滑板车的转向功能,通过手脚交替作为滑板驱动力,可以减缓儿童滑滑板的疲劳速度,从而可以增加滑滑板的时间,且使身体得到更加全面的锻炼。
60.通过设置单手动摇杆5、双手动摇杆5或者多手动摇杆5,双摇杆设置时,双摇杆相对于单摇杆,可以使手动前后往复摇动的驱动力连续,滑板车是通过左右倾斜转向的,通过使轮架21在受到左右侧不平衡作用力时发生倾斜,从而实现转向的目的。本儿童滑板仅通过单向传动轮11即可实现手动力的动力输入和兼顾转向功能,功能可以切换,既能像传统儿童滑板一样用脚蹬提供动力,也能用手臂提供动力可以锻炼手臂,传统的只能锻炼脚和腿。传统的非重力式滑板车,并不适合手前后摇,需要将转向轮和动力轮分开,人很难仅凭手即控制方向又输入动力,所以传统的单轮手动转向滑板与重力转向滑板有本质的区别,转向和动力输入,不能是简单的叠加或分离,手摇式动力输入,仅能适合重力转向滑板车,通过将刹车板13与手动摇杆5配合减速,使减速操作更加简单,同时相对于传统滑板减速机构更加简单。
61.上述实施例是对本实用新型的说明,不是对本实用新型的限定,任何对本实用新型简单变换后的方案均属于本实用新型的保护范围。