行人警报系统和方法
1.本技术是2017年8月18日提交的pct国际申请pct/ca2017/050976的申请号为201780049922.3、发明名称为“行人警报系统和方法”的中国国家阶段专利申请的分案申请。
技术领域
2.本公开涉及自动驾驶辅助系统(adas)领域。具体地,涉及一种行人警报系统和方法。
背景技术:
3.目前的行人警告系统以及要求这种系统的法律都针对被动系统,在这种被动系统中,车辆一般在车辆行驶方向上并且通常低于某一阈值速度(例如《30km/h)时发出警告声音(通常是合成的听起来像内燃机驱动的车辆)。
4.尽管这种警告声音在行人附近只有少量车辆时可能是有用的,但是由于大量车辆发出的噪声汇合而产生的掩蔽效应,它们在交通密集的拥堵城区环境中很可能没什么效果。
5.此外,目前的系统假设行人很熟悉并且也很注意发出的“类似发动机”的声音。
6.出于对行人和骑车人安全的担忧以及由于一些国家的法律,汽车制造商提出了一项新要求,即用于警告安静车辆即将接近的外部警报声音。这些声音通常仅在车辆正以低于一定速度移动时产生,但是实际上也可以根据速度进行实际调整(响度/音高)。目前的外部警报声音具有一些限制,诸如下文所描述的。
7.目前的外部警报声音通常以一恒定音量重放,不考虑汽车周围物理环境中的噪声级别。例如,存在许多相互冲突和令人迷惑的声音和噪声源的非常嘈杂的街道环境可以迷惑行人和骑车人。相反,在非常安静的环境下(诸如居民区的深夜),响亮的警报声音会干扰周围的人。
8.目前的外部警报声音不是指向车辆运动的预期方向。例如,现有的电动汽车在有人行横道的情况下,等待左转穿过迎面而来的车流时,其警报声音会向前投射,但实际的预期运动方向是直角。
9.目前的外部警报声音可能不太容易被定位。也就是说,所使用的声音的特性使得人很难确定声音源的来源。
10.需要一种行人警报系统和方法,其减轻或消除了上述一个或多个缺陷。
附图说明
11.参考下列附图和描述可以更好地理解所述系统和方法。附图中的组件不是必须按比例绘制,重点放在图示本公开的原理。而且,在附图中,类似地参考标号贯穿不同视图指代对应部分。
12.在审查下列附图和详细描述之后,其他系统、方法、特征和优势对于本领域技术人
员而言将是或将变得明显。意图是所有这种额外的系统、方法、特征和优势包括在本描述中并且受随后的权利要求所保护。
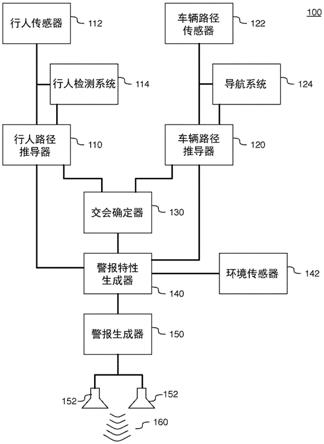
13.图1是行人警报系统的示意性表示;
14.图2是可以使用行人警报系统的场景的示意性表示;
15.图3是行人警报方法的表示;以及
16.图4是行人警报系统的另一示意性表示。
具体实施方式
17.行人警报系统和方法推导代表行人预计路径的行人路径,推导代表机动车辆预计路径的车辆路径,确定行人路径和车辆路径的交会,响应于所确定的交会来确定警报特性,以及响应于所确定的警报特性,生成从车辆发出的警报。
18.行人警报系统和方法可以被构建、安装或实施在机动车辆中,诸如在可能与行人接近的环境中行驶的汽车、客车、商务车或其他类似机动车辆。通过发出可能吸引行人注意到机动车辆的存在的警报,行人警报系统和方法减轻了机动车辆与行人之间碰撞的可能性。
19.尽管参考行人描述了行人警报系统和方法,应当理解,该系统和方法同样可以应用于骑自行车或滑滑板的人、轮椅或电动轮椅中的人、宠物(例如,狗)、驯养动物(例如,羊或牛)或野生动物(例如,鹿)。
20.图1是行人警报系统100的示意性表示。行人警报系统100可以包括行人路径推导器110、车辆路径推导器120、交会确定器130、警报特性生成器140和警报生成器150。
21.图2是从开销角度而言可以使用行人警报系统100的场景的示意性表示。在示例场景200中包括机动车辆202和三个行人204a、204b和204c(统一或一般称为行人204)。行人204b骑车,而行人204a和204b步行。示例机动车辆202内配置和/或已经安装了行人警报系统100、一个或多个行人传感器112、一个或多个发射器152以及一个或多个环境传感器142。场景200还包括针对行人204a、204b和204c每一个的相应的预测的行人行进路径206a、206b和206c(统一或一般称为预测行人行进路径206)。场景200还包括预测的机动车辆行进路径208。场景200进一步包括针对行人204a和204b每一个的相应的警报信号160a和160b(统一或一般称为警报信号160)。
22.再次参考图1,行人路径推导器110可以从行人传感器112和/或行人检测系统114接收输入信号和数据。行人传感器112可以包括一个或多个光学/视觉传感器(例如,相机)、红外传感器、超声传感器、激光/lidar、雷达、感应线圈和用于检测在机动车辆202附近行人204的存在和位置的其他类似公知传感器。行人检测系统114还可以或备选地从行人传感器112接收输入信号和数据。行人检测系统114可以是用于检测机动车辆202附近行人204的存在和位置的任何已知系统或子系统。行人检测系统114可以是单机系统或者可以是装配在机动车辆202内的另一高级驾驶辅助系统(adas)的子系统,该另一系统诸如为例如向机动车辆操作者(例如,驾驶员)提供已经检测到行人204的警告并且可以额外地启动制动动作的行人警告系统。行人检测系统114能够识别和区分不同行人类型,诸如步行的行人、骑车人和动物,并且可以将此信息提供给行人警报系统100的其他组件,诸如行人路径推导器110和警报特性生成器140。
23.行人路径推导器110可以基于例如对检测到行人204的一系列位置(例如,定位)和时间的时间序列分析来推导针对所检测到的行人的预测行进路径。该分析可以使用任何已知技术,包括例如数值分析方法(诸如外推或回归),以生成针对行人204的未来预测位置(定位),由此推导预测的行人行进路径206。预测的行人行进路径206可以包括方位预计路径算法/函数和行人速度中任意项。预测的行人行进路径206可以指示行人204基本上静止,当确实是这种情形时。
24.车辆路径推导器120可以从车辆路径传感器122和/或导航系统124接收输入信号和数据。车辆路径传感器122可以包括与车辆速度、转向角、全球定位系统(gps)、偏航、罗盘方位、道路/车道检测、转向信号操作、道路地图、路线相关联的一个或多个传感器以及其他类似传感器。导航系统124还可以或备选地从车辆路径传感器122接收输入信号和数据。导航系统124可以是用于导航选定路线和/或确定机动车辆202相对于道路地图的定位的任何已知系统或子系统。
25.车辆路径推导器120可以基于例如对从车辆路径传感器122接收的信号和数据应用任何已知的预计算法来推导预测的机动车辆行进路径208。备选地或附加地,车辆路径推导器120可以基于从导航系统124接收的信号和数据(包括例如选定路线和/或道路地图数据)来推导预测的机动车辆行进路径208。预测的机动车辆行进路径208包括针对机动车辆202的未来预测位置(定位)。预测的机动车辆行进路径208可以包括方位预计路径算法、路线和机动车辆速度中的任意项。
26.交会确定器130接收来自行人路径推导器110的预测行人行进路径206和来自车辆路径推导器120的预测机动车辆行进路径208。交会确定器130可以使用未来时间序列分析来确定预测行人行进路径206在未来某个时间点是否将与预测机动车辆行进路径208交会。该确定可以得到将发生交会210或不会发生交会210的确定结果。除了预测行人行进路径206和预测机动车辆行进路径208之外,交会确定可以考虑其他因素,诸如机动车辆的宽度、机动车辆的转弯半径、道路地图信息和其他类似因素。当确定将发生交会210(例如,即将发生行人204a与机动车辆202之间的碰撞)时,可以计算(例如,预测)将发生交会210的一个或多个交会位置以及对应的交会时间。
27.警报特性生成器140接收交会确定的结果(例如,将发生交会或不会发生交会),并且当确定将发生交会210时,还可以从交会确定器140接收一个或多个交会位置以及对应的交会时间。警报特性生成器140还可以接收来自行人路径推导器110的预测行人行进路径206和来自车辆路径推导器120的预测机动车辆行进路径208。警报特性生成器140还可以接收来自行人路径推导器110或行人探测器114的关于行人类型(例如,步行的行人、骑车人或动物)的指示。警报特性生成器140也可以接收来自一个或多个环境传感器142(诸如一个或多个安装在外部用于检测机动车辆202正在穿行通过的环境中的背景噪声级别的麦克风)的信号或数据。警报特性生成器140响应于所接收的上述输入,生成关于警报信号的特性。警报信号160是从机动车辆202发出的信号,用以警告行人204机动车辆202的存在和位置以及与机动车辆202的潜在交会(例如,碰撞)。
28.警报特性生成器140所生成的警报特性可以包括以下一项或多项:响度(或者说声压级别、音量或增益)、音高或频率、警报信号内容、方向和其他警报特性。例如,响度可以响应于外部麦克风142所检测到的环境噪声级别来调高或者调低,以便在与机动车辆速度相
适应的范围内,针对特定人类听觉能力实现基本上恒定的可听度。在另一示例中,响度可以基于相对于机动车辆202的行进方向的实质行进方向(例如,朝向或远离)来调高或调低。当警报信号160已经发出一段时间之后,交会确定器130继续确定将发生交会(例如,即将发生行人204与机动车辆202之间的碰撞)时,响度也可以随时间增大。
29.警报信号内容可以包括脉冲声音。一般说来,包含瞬时宽带信息的脉冲声源比连续音频或周期信号更容易定位。声音信号内容可加以调整,使最常见的听力损失形式的人(例如长者)更容易听到。声音信号内容例如可以包括在2.5khz以下产生最多能量的声音,由此使得警报信号适应最常见的听力损失形式,即发生在3khz左右的“噪声诱导缺口”。由于空气中的声音吸收随着频率的增加而增加,这种声音信号内容在相同幅度下,相比于在更高频率内容上具有更多能量的信号也可以具有更大的范围。备选地或附加地,在所有时间或者在检测到的行人类型为动物而非人类时,声音信号内容可以包括一种特别对于动物(例如宠物或野生动物)可听的成分。
30.生成的警报特性可以包括响应于预测行人行进路径206和预测机动车辆行进路径208随时间变化的方向,以便即使机动车辆202和/或行人204随时间相对彼此继续移动,警报信号160仍然在行人204的方向上发出。
31.警报生成器150接收警报特性生成器140所生成的警报特性并且生成由发射器152发出的警报信号160。发射器152可以包括以下一个或多个:固定音频换能器(亦称扬声器)、可转向音频换能器、超声换能器或可以用来生成指向行人204的方向性可控音频信号(也即警报信号160)的其他类似机制。警报信号160的方向性可以通过使用已知相位或幅度调制(例如,相位阵列)技术的扬声器阵列来实现。备选地或附加地,警报信号160的方向性可以通过从换能器阵列中选择一个或多个音频换能器来实现,或者通过控制一个或多个可转向音频换能器来实现。
32.警报信号160可以是对另一警告信号的附加、修改或取代而生成的,例如,该另一警告信号诸如是在某些司法管辖区对电动汽车要求的全方位或固定方向行人警告。
33.警报信号160可以比常规警告声音具有更高频率,从而其来源可以更容易被行人204定位,更能抓住注意力,并且可以以更高音量发射。此外,如果系统100继续确定行人和车辆路径将交会的话,警报声音音量可以持续增大。
34.行人警报系统100的操作可以随时间持续进行。接收自各种传感器的每个输入以及本文所描述系统100的组件生成的每个输出可以随时间在连续或周期性的基础上重复确立(reassert)、更新、添加或移除。本文所描述系统100的组件所产生的推导、确定和生成中的每一个都可以随时间连续或周期性地重新计算、重新评估或重新生成。
35.系统可以检测在与(相同或相邻车道上的)车辆相同方向上行进的骑车人204b并且发出具有不同警报特性的警报信号160,其旨在于吸引骑车人204b注意到机动车辆202的存在而不是警告碰撞。
36.行人警报系统100可以用于机动车辆202的仅前向行进或者前向和后向(反向)行进二者。此外,行人警报系统100可以用在强制安装有静态行人警告系统的车辆(例如,电动汽车)和未强制的车辆(例如内燃机驱动车辆)的任一或二者中。
37.图3是行人警报方法的表示。例如,行人警报方法300可以使用本文参考图1和图4描述的系统100和400中的任一系统来实现。行人警报方法300可以包括下列动作。
38.推导预测的行人行进路径302。可以使用任何已知技术来推导预测的行人行进路径206,例如包括诸如上文描述的数值分析方法。推导可以基于从行人传感器112和/或行人检测系统114接收的信号和数据。可以同时推导多个预测的行人行进路径206a、206b和206c,每个针对相应的行人204a、204b和204c。
39.推导预测的机动车辆行进路径304。可以通过对接收自车辆路径传感器122的信号和数据应用任何已知预计算法来推导预测的机动车辆行进路径208。备选地或附加地,车辆路径推导器120可以基于从导航系统124接收的信号和数据(包括例如选定路线和/或道路地图数据)来推导预测的机动车辆行进路径208。
40.确定预测的行人行进路径与预测的机动车辆行进路径的交会306。交会的确定可以使用未来时间序列分析来确定预测的行人行进路径206在未来某个时间点是否将与预测的机动车辆行进路径208交会。该确定可以得到将发生交会210或不会发生交会210的确定结果。除了预测的行人行进路径206和预测的机动车辆行进路径208之外,交会确定可以考虑其他因素,诸如机动车辆的宽度、机动车辆的转弯半径、道路地图信息和其他类似因素。当确定将发生交会210(例如,即将发生行人204a与机动车辆202之间的碰撞)时,可以计算(例如,预测)将发生交会210的一个或多个交会位置以及对应的交会时间。当预测的行人行进路径206b与预测的机动车辆行进路径208基本平行时(例如骑车人204b的情形),预测的行人行进路径206不会与预测的机动车辆行进路径208交会。当预测的行人行进路径206c与预测的机动车辆行驶路径208横向偏移并且不会聚时(例如在人行道或路边行走的行人204c的情形),预测的行人行进路径206不会与预测的机动车辆行进路径208交会。
41.确定警报特性308。确定警报特性使用交会确定动作306的结果(例如,将发生交会或不会发生交会)。当确定将发生交会210时,确定警报特性还可以使用交会确定动作中生成的一个或多个交会位置和对应的交会时间。确定警报特性还可以使用预测的行人行进路径206和预测的机动车辆行进路径208。确定警报特性还可以使用关于行人类型(例如,步行的行人、骑车人或动物)的指示。确定警报特性也可以使用来自一个或多个环境传感器142(例如一个或多个安装在外部用于检测机动车辆202正在穿行通过的环境中的背景噪声级别的麦克风)的信号或数据。确定警报特性包括响应于所接收的上述输入,生成警报信号的特性。警报信号160是从机动车辆202发出的信号,用以警告行人204机动车辆202的存在和位置以及可选地警告与机动车辆202的潜在交会(例如,碰撞)。
42.所确定的(例如,生成的)警报特性可以包括以下一项或多项:响度、音高或频率、警报信号内容、方向和其他警报特性。例如,针对警报信号160a所确定的响度和音高特性通常比针对警报信号160b所确定的响度和音高特性更响亮更尖锐(例如,更加引人注意),其中警报信号160a将被指向已确定发生交会的行人204a,而警报信号160b将被指向邻近机动车辆202但是已确定不会发生交会的行人204b。可以确定针对行人204a确定的诸如响度和音高之类的警报特性,以确保警报信号160a吸引该行人的注意并警告该行人204a即将到来的碰撞造成的危险。在行人204b的情形中,可以确定诸如响度和音高之类的警报特性,使得警报信号160b警告行人204b机动车辆202的存在而不会让人吃惊或分心。对于不是非常接近机动车辆202并且已确定不会发生交会的行人206c,可以确定警报特性使得不生成警报信号160。
43.所确定的响度特性可以响应于外部麦克风142所检测到的环境噪声级别来调高或
者调低,以便在与机动车辆202速度相适应的范围内,针对特定人类听觉能力实现基本上恒定的可听度。即使当警报信号160已经发出一段时间之后,交会确定动作306继续确定将发生交会(例如,即将发生行人204a与机动车辆202之间的碰撞)时,响度也可以随时间增大。
44.警报信号内容可以包括脉冲声音。一般说来,包含瞬时宽带信息的脉冲声源比连续音频或周期信号更容易定位。在所有时间或者在检测到的行人类型为动物而非人类时,声音信号内容可以包括一种特别对于动物(例如宠物或野生动物)可听的成分。
45.生成的警报特性可以包括响应于预测的行人行进路径206和预测的机动车辆行进路径208随时间变化的方向,以便即使机动车辆202和/或行人204随时间相对彼此继续移动,警报信号160仍然在行人204的方向上发出。
46.确定对应于一个或多个警报信号160的警报特性可以同时进行确定,其中每组警报特性与一个或多个行人(例如,204a、204b和204c)中的相应一个相关联。
47.生成警报信号310。生成警报信号使用从警报特性确定动作308得到的警报特性并且生成由发射器152发出的警报信号160。警报信号160的方向性可以响应于从警报特性确定动作308得到的方向特性、使用上文参考信号生成器150描述的任何机制来实现。警报信号160的方向可以响应于变化或更新的方向特性而随时间变化或更新。生成的警报信号160的其他特性(例如响度等)也可以响应于在警报特性确定动作308中做出的变化而随时间变化。响应于从警报特性确定动作308得到的分别对应的警报特性组,也可以同时生成一个或多个不同的警报信号,诸如160a和160b。
48.行人警报方法的其他实施例可以包括比图3中所示动作更多、更少或不同的动作。行人警报方法300可以随时间持续进行。接收自各种传感器的每个输入以及本文所描述方法300的动作生成的每个输出可以随时间连续或周期性地重复确立、更新、添加或移除。本文所描述方法300的动作所产生的推导、确定和生成中的每一个可以随时间连续或周期性地重新评估或重新生成。
49.图4是行人警报系统的示意性表示。系统400包括处理器402、存储器404(其内容可由处理器402访问)和i/o接口406。
50.处理器402可以包括单个处理器或多个处理器,该多个处理器可以设置在单个芯片上、多个设备上或者分布在不止一个系统上。处理器402可以是执行存储器404中或其他存储器中包含的计算机可执行指令或计算机代码以执行系统的一个或多个特征的硬件。处理器402可以包括通用处理器、中央处理单元(cpu)、图形处理单元(gpu)、专用集成电路(asic)、数字信号处理器(dsp)、现场可编程门阵列(fpga)、数字电路、模拟电路、微控制器、任何其他类型的处理器,或者其任意组合。
51.存储器404可以包括用于存储和取回数据、处理器可执行指令或其任意组合的设备。存储器404可以包括非易失性和/或易失性存储器,诸如随机访问存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom)或闪存。存储器404可以包括单个设备或多个设备,该多个设备可设置在一个或多个专用存储设备上或处理器或其他类似设备上。备选地或附加地,存储器404可以包括光的、磁的(硬驱)或任何其他形式的数据存储设备。
52.存储器404可以存储指令,当使用处理器402执行这些指令时可以使系统400实现与本文所描述的行人路径推导器110、车辆路径推导器120、交会确定器130、警报特性生成器140和警告生成器150相关联的功能。计算机代码可以以任何计算机语言编写,诸如c、c+
+、汇编语言、信道程序代码、和/或任何计算机语言组合。此外,存储器404可以存储预测的行人行进路径408、预测的机动车辆行进路径410和警报特性412。
53.i/o接口406可以用于连接设备,诸如行人传感器112、车辆路径传感器122、环境传感器142、发射器152以及系统400的其他组件。
54.尽管描述了特定实现,本公开全文在本质上是示例性而非限制性的。系统100和400可以包括比图1和图4中所示更多、更少或不同的组件。而且,系统100和400的组件中的每个组件可以包括比图1和图4中所示更多、更少或不同的元件。标记、数据、数据库、表格、实体以及其他数据结构可以分别存储和管理,可以合并到单个存储器或数据库中,可以是分布式的,或者可以以多种不同方式在逻辑上或物理上进行组织。组件可以独立操作或者可以是同一程序或硬件的一部分。组件可以驻留在单个硬件上,诸如单独的可拆卸电路板上;或者分享公共硬件,诸如同一存储器和用于实施来自该存储器的指令的处理器。程序可以是单个程序的一部分、单独的程序、或者分布在若干存储器和处理器上。
55.响应于存储在计算机可读介质中或计算机可读介质上的一个或多个逻辑或指令集,可以执行附图中示出或者描述的功能、动作或任务。这些功能、动作或任务独立于特定类型的指令集、存储介质、处理器或处理策略,并且可以通过软件、硬件、集成电路、固件、微代码等单独地或组合操作来实现。类似地,处理策略可以包括多处理、多任务、并行处理、分布式处理和/或任何其他类型的处理。在一个实施例中,指令存储在供本地或远程系统读取的可拆卸介质设备中。在其他实施例中,逻辑或指令存储在远程位置以通过计算机网络或通过电话线路传输。在另一些其他实施例中,逻辑或指令可以存储在给定计算机中,诸如cpu中。
56.尽管已经描述了行人警报系统和方法的各种实施例,但是对于本领域普通技术人员将很明显的是在本发明的范围内可以有更多的实施例和实现方式。因此,本发明仅受所附权利要求及其等同物的限制。