用于无线功率传送的自适应漫游且铰接生成单元
相关申请的交叉引用
1.本技术根据35usc 119(e)要求于2019年4月19日提交的序列号为62/836,320的申请、于2019年5月15日提交的序列号为62/848,506的申请以及于2019年11月20日提交的序列号为62/937,917的申请的权益,所有申请的内容以引用的方式全文结合于此。
技术领域
2.本发明涉及无线功率输送,并且更具体地涉及一种移动功率输送系统。
背景技术:
3.通过使用射频(rf)和毫米波波束形成和聚焦,非接近无线功率传输实现并增强了大量新应用。例如,物联网(iot)装置和传感器的扩散可通过向它们无线地输送功率并消除否则在它们的安装期间将要求的布线来显著加速。
4.无线功率传输的另一示例是便携式个人装置(诸如智能电话和平板电脑)的无线充电。对此种装置进行无线充电将增强其可用性并降低对携带便携式电池的需要。另外,许多其它电子装置(从无线鼠标和键盘到恒温器和安全传感器和相机)可以从无线功率传送受益。
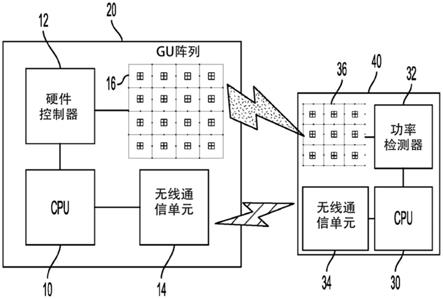
5.无线功率生成单元(gu)可以包括多个rf源和天线、以及其他部件(诸如处理单元、接口电路、通信电路等)。rf能量焦点可以在目标装置所处的期望位置形成。可以使用布置在目标装置中的能量回收单元来捕获rf能量。回收单元(ru)可以除其它部件之外具有测量电路、处理和通信电路等。ru可以利用各种功率回收装置(诸如整流天线)来收集rf能量并将其转换成dc能量。图1示出了对ru 40无线供电的gu 20。gu 20被示出为部分地包括处理器10、控制器12、无线通信电路14和发送天线阵列16。ru 40被示出为部分地包括处理器30、功率检测器32、无线通信电路34和接收天线阵列36。
6.gu理想地适配为在不同方向和取向上快速且有效地传输和传送功率,而不会有太多功率溢出(即,功率未被回收并由此浪费)。gu通过设置rf信号的相位的组合来实现最大功率传送,rf信号的相位使ru的位置和取向的能量集中最大化。
7.对于给定的有效gu孔径面积ag、有效ru孔径面积ar、gu与ru之间的距离d以及信号波长λ,定义为入射在ru孔径上的功率与由gu传输的功率的比率的传送效率η可近似为:其中
8.在相对大的距离处,传送效率可以被估计为r,由此产生:
9.等式(3)假设gu的孔径和ru的孔径彼此面对并且均垂直于连接它们的中心的轴线。
10.要使用同一gu无线充电的目标装置可以相对于gu处于不同位置和取向。因此,一些目标装置可能由于它们的位置和取向而无法最佳地接收功率。此外,gu与目标装置之间的路径可能被阻碍,即使在最佳相位组合和所得到的相长干涉图样下。仍然存在对无线功率输送的改进方法和系统的需要。
技术实现要素:
11.根据本发明的一个实施例,一种无线功率输送系统部分地包括漫游且铰接无线功率传送装置,该漫游且铰接无线功率传送装置又部分地包括无线功率生成单元、能量存储单元、控制器和电驱动移动平台。无线功率生成单元部分地包括至少一个电磁功率源。
12.在一个实施例中,无线功率生成单元还部分地包括至少一个rf发送器。在一个实施例中,无线功率生成单元还部分地包括适配为以相同频率辐射rf信号的rf发送器阵列。在一个实施例中,控制器适配为独立地控制各个rf发送器的相位。
13.在一个实施例中,漫游且铰接无线功率传送装置还包括一个或多个传感器。在一个实施例中,移动平台部分地包括惯性测量单元,以便于导航。在一个实施例中,移动平台部分地包括gps,以便于导航。在一个实施例中,移动平台部分地包括碰撞传感器,以在撞到障碍物时改变移动的方向。在一个实施例中,移动平台部分地包括接近传感器,以避免撞到障碍物。在一个实施例中,接近传感器使用超声。在一个实施例中,接近传感器包括ir传感器。在一个实施例中,装置还包括相机。
14.在一个实施例中,装置适配为通过使用相机识别印刷或布置在功率回收单元上的图案来定位回收单元。在一个实施例中,装置还包括无线通信链路。在一个实施例中,装置经由通信链路建立与回收单元的双向通信。在一个实施例中,能量存储单元是电池。在一个实施例中,电池是可再充电的。在一个实施例中,电池经由坞站充电。
15.在一个实施例中,装置还包括感应充电线圈。在一个实施例中,坞站适配为使用感应充电线圈对装置进行感应充电。在一个实施例中,装置还适配为经由坞站所发送的信标来定位坞站。在一个实施例中,能量存储单元是燃料电池。
16.在一个实施例中,功率生成单元发送可见或红外光谱中的电磁波,以无线地传送功率。在一个实施例中,无线功率输送系统还部分地包括至少一个马达,其适配为改变无线功率生成单元的仰角。在一个实施例中,无线功率输送系统还部分地包括剪式升降结构,其适配为响应于马达而改变无线功率生成单元的仰角。在一个实施例中,无线功率输送系统还部分地包括伸缩臂式升降结构,其适配为响应于马达而改变无线功率生成单元的仰角。
17.在一个实施例中,无线功率输送系统还部分地包括至少一个马达,其适配为改变无线功率生成单元的方位角。在一个实施例中,无线功率输送系统还部分地包括至少一个马达,其适配为改变无线功率生成单元的标高。在一个实施例中,无线功率输送系统还部分地包括剪式升降结构,其适配为响应于马达而改变无线功率生成单元的标高。在一个实施
例中,无线功率输送系统还部分地包括伸缩臂式升降结构,其适配为响应于马达而改变无线功率生成单元的标高。
18.在一个实施例中,系统还部分地包括适配为升降系统的升降机。在一个实施例中,系统还部分地包括适配为升降无线功率生成单元的至少一部分的升降机。在一个实施例中,移动平台适配为导航到无线功率生成单元将最大功率从其输送到回收单元的位置。在一个实施例中,
19.在一个实施例中,系统适配为导航和选择无线功率生成单元的方位角、标高和仰角,使得系统将最大功率输送到回收单元。在一个实施例中,系统适配为导航和选择无线功率生成单元的各个rf发送器的方位角和相位,使得系统将最大功率输送到回收单元。
20.在一个实施例中,控制器包括存储器,以存储由系统无线供电的回收单元的列表。在一个实施例中,列表包括与各个回收单元相关联的优先级。在一个实施例中,各个回收单元的优先级根据回收单元的电荷水平来建立。在另一实施例中,各个回收单元的优先级基于回收单元与系统的距离来建立。
21.在一个实施例中,系统还部分地包括第二漫游且铰接无线功率传送装置。第二漫游且铰接无线功率传送装置部分地包括:无线功率生成单元,其包括至少一个电磁功率源;能量存储单元;控制器;和电驱动移动平台。第一无线功率生成单元和第二无线功率生成单元被配置为一致地操作,以便形成比第一功率生成单元或第二功率生成单元大的组合功率生成单元。在一个实施例中,第一装置和第二装置共享由第一装置和第二装置无线接收的参考时钟频率。在一个实施例中,rf发送器阵列是可折叠和可展开的。
22.在一个实施例中,rf发送器阵列包括多个扇形子阵列。在一个实施例中,rf发送器阵列包括经由多个弹簧加载铰链机械地联接到彼此的多个子阵列。系统还包括被构造为缩回多个子阵列的马达和绳。在一个实施例中,rf发送器阵列包括适配为使用齿轮折叠和展开的多个伸缩子阵列。在一个实施例中,rf发送器阵列包括适配为根据折纸图案折叠和展开的多个子阵列。
23.根据本发明的一个实施例,一种无线功率传送系统部分地包括移动平台和反射器。在一个实施例中,系统还部分地包括至少一个适配为改变反射器的仰角的马达。在一个实施例中,系统还部分地包括至少一个适配为改变反射器的方位角的马达。在一个实施例中,反射器是rf反射器。在一个实施例中,rf反射器是弯曲的。
24.根据本发明的一个实施例,一种无线功率传送系统部分地包括:无线功率生成单元,其又部分地包括多个rf发送器;和无线功率回收单元,其适配为被无线充电。无线功率回收单元部分地包括具有可变取向的至少一个接收天线。在一个实施例中,无线功率回收单元部分地包括至少一个rf接收器,其在与rf发送器大致相同的rf频率下操作。
25.在一个实施例中,rf发送器和rf接收器形成雷达。在一个实施例中,系统还部分地包括适配为移动系统以形成合成孔径雷达的电驱动移动平台。在一个实施例中,雷达感测多普勒频移,以检测生物信号。在一个实施例中,生物信号通过呼吸来定义。在一个实施例中,生物信号通过心跳来定义。在一个实施例中,通过接收从遥控单元发送的命令来远程操作系统。在一个实施例中,遥控单元是智能电话。
26.根据本发明的一个实施例,一种无线功率传送系统部分地包括:无线功率生成单元,又包括多个rf发送器;基座;至少一个臂,其将无线功率生成单元机械地联接到基座;第
一致动器,其使无线功率生成单元能够围绕至少一个臂旋转;以及第二致动器,其使至少一个臂能够围绕基座旋转。在一个实施例中,基座部分地包括轮。在一个实施例中,轮适配为在轨道上移动。
附图说明
27.图1示出了如现有技术中已知的为装置无线供电的功率生成单元。
28.图2a和图2b是根据本发明的一个示例性实施例的适配为无线地输送功率的漫游且铰接单元的简化前立体图和后立体图。
29.图3是根据本发明的一个示例性实施例的漫游且铰接单元的底部立体图。
30.图4示出了根据本发明的一个示例性实施例的经由漫游且铰接无源单元对装置无线供电的功率生成单元。
31.图5是根据本发明的一个示例性实施例的包括剪式升降结构的漫游且铰接单元的示意图。
32.图6是根据本发明的另一示例性实施例的包括剪式升降结构的漫游且铰接单元的示意图。
33.图7a示出了根据本发明的一个实施例的包括多个扇形子阵列的可伸缩天线阵列。
34.图7b示出了根据本发明的一个实施例的处于完全展开模式的图7a的可伸缩天线阵列。
35.图7c示出了根据本发明的一个实施例的包括多个子阵列的可伸缩天线阵列。
36.图7d示出了根据本发明的一个实施例的包括多个子阵列的可伸缩天线阵列。
37.图7e示出了根据本发明的一个实施例的可伸缩天线阵列,该可伸缩天线阵列包括适配为使用折纸图案折叠和展开的多个子阵列。
38.图7f示出了根据本发明的一个实施例的图7e的部分折叠之后的天线阵列。
39.图7g示出了根据本发明的一个实施例的图7e的折叠之后的天线阵列。
40.图8示出了根据本发明的一个实施例的具有自铰接臂的漫游且铰接单元,该自铰接臂适配为将漫游且铰接单元插入到插座,以对漫游且铰接单元的内部电池进行充电。
41.图9示出了根据本发明的一个实施例的功率生成单元,该功率生成单元具有适配为从漫游且铰接单元的顶面升起的发送元件和天线的阵列。
42.图10示出了根据本发明的一个实施例的功率生成单元,该功率生成单元具有适配为经由剪式升降结构从漫游且铰接单元的顶面升起的发送元件和天线的阵列。
43.图11示出了根据本发明的一个实施例的漫游且铰接单元从其向目标装置传输功率的多个位置。
44.图12a示出了根据本发明的一个示例性实施例的漫游且铰接单元的各种部件。
45.图12b示出了根据本发明的一个示例性实施例的漫游且铰接单元的各种部件。
46.图13是根据本发明的一个实施例的用于通过漫游且铰接单元对目标装置进行无线充电的流程图。
47.图14示出了根据本发明的一个实施例的多个漫游且铰接单元,这些漫游且铰接单元移动为彼此非常接近,以形成相对较大的传输孔径。
48.图15a示出了根据本发明的一个实施例的具有经由臂安装在基座上的发送器阵列
的功率生成单元。
49.图15b示出了根据本发明的一个实施例的具有经由多个臂安装在基座上的发送器阵列的功率生成单元。
50.图16示出了根据本发明的一个实施例的功率生成单元,该功率生成单元具有安装在基座上的发送器阵列,该基座具有适配为在轨道上移动的轮。
51.图17示出了根据本发明的一个实施例的功率生成单元,该功率生成单元具有经由多个臂安装在基座上的发送器阵列和多个传感器。
52.图18是根据本发明的一个实施例的用于为装置无线供电的流程图。
53.图19是根据本发明的一个实施例的用于为装置无线供电的流程图。
具体实施方式
54.根据本发明的一个方面,漫游且铰接生成单元(ragu)主动搜索目标装置,并且移动到最佳位置和取向,以为目标装置无线供电。ragu可同时或在不同时间段期间对多个目标装置充电。ragu可基于充电状态(诸如目标装置的功率需求)来对功率输送进行优先级排序。在第一时间段期间对一个或一组装置无线充电之后,ragu适配为搜索新的目标装置,移动到另一最佳位置和取向(相对于新的装置),并且开始向新的目标装置无线传送功率。
55.ragu可具有内部能量存储单元,该内部能量存储单元例如使用壁装电源插座、坞站或从另一无线功率生成单元(gu)充电。坞站可以具有将ragu连接到外部电源(例如,壁装电源插座)的电连接器和布线,或者可以对ragu进行感应充电。由ragu供电的装置可以是固定的、移动的或另一ragu。在一个实施例中,ragu可通过发送电磁波(rf、毫米波、光)或通过发送声波来向目标装置提供功率。
56.在使用波(例如声波、rf、毫米波或光)来输送功率的实施例中,ragu包括发送元件阵列,该阵列相干且一致地操作,以生成聚焦波束,以便实现透镜效应。在这样的实施例中,通过调节发送器阵列的单独发送元件的相位,将能量聚焦在ru上。此外,在这样的实施例中,可以使用例如定向波源(诸如喇叭天线、碟形天线)或者替代地使用准直光源或激光来无线地传输功率。参考生成和聚焦rf信号的无线功率输送系统来提供本发明的实施例的以下描述。然而,应当理解,本发明的实施例同样适用于毫米波、声波、光波等。
57.图2a和图2b是根据本发明的一个示例性实施例的ragu 100的简化前立体图和后立体图。ragu 100可以是马达驱动的基于轮的移动无线功率输送系统,该系统被示出为部分地包括基座102和发送天线阵列112。基座102适配为在地面上沿着x轴和y轴移动,并且沿着z轴旋转,如图所示。天线阵列部分地包括适配为将射频信号聚焦在目标装置上的发送天线阵列104。ragu 100还部分地包括铰接单元114,可以是交叉剪式单元,如图2a和图2b所示,适配为调节天线阵列的高度、取向和倾斜。由此,ragu 100适配为通过平移和旋转运动的组合以及通过其天线阵列112的铰接来优化其相对于目标装置的位置和取向。尽管未示出,但在一些实施例中,作为用于无功率输送的波源的天线阵列可使用例如万向节来移动。
58.根据本发明的一些实施例,ragu可包括多模态感测单元。例如,在一些实施例中,ragu可包括(未示出)红外(ir)距离和接近传感器、超声传感器、用于视觉感测的光学相机、雷达、激光雷达、gps、接触传感器、麦克风、惯性测量单元(imu)传感器、电场扰动传感器、相机等。这种传感器使得ragu不仅能够导航通过诸如家、办公室、商店、仓库等场所的有限空
间并提供这种空间的映射,而且能够识别有生命的对象和其中可能需要控制要传送的功率的性质和量的其他敏感区域。
59.根据本发明的实施例,ragu可由内部能量源(例如,可再充电电池、燃料电池)供电,或者由外部电源供电,以实现其移动、感测、功率输送和其它操作。ragu可使用坞站来从壁装电源插座接收功率。在一些实施例中,ragu可由另一个ragu无线供电。
60.ragu可以借助于接近感应充电来无线地充电。图3是根据本发明的一个实施例的ragu 150的底部立体图。ragu 150被示出为部分地包括感应线圈152,其用于在ragu移动到图中未示出的充电板上时进行感应充电。在一些实施例中,ragu可在定位于坞站中或充电板上的同时对目标装置无线供电。当不在坞站或充电板中时,ragu经由其电池和内部电源执行各种感测和无线功率输送操作。
61.根据本发明的另一方面,漫游且铰接无源单元(rapu)促进将由另一gu或ragu生成的无线功率传送到一个或多个目标装置。rapu可以是反射器、折射器,或者包括多个超颖表面,以重定向由ragu或另一固定rf无线功率生成单元(gu)生成的rf能量束。例如,如果从gu或ragu到目标装置的路径被物体阻挡,则rapu适配为移动到使得rf波束能够被重定向到目标装置的位置。图4示出了gu 200尝试对目标装置210无线供电。gu 200是假设安装在例如顶板上的固定单元。从gu200到装置210的rf功率的路径在图4中示出为被物体220阻挡。为了实现无线功率输送,rapu 230移动到新位置,如图所示,使得由gu 200生成并由rapu的反射器235反射的rf功率无阻碍地到达目标装置210。
62.如上所述,除了平移和旋转运动之外,ragu还可以具有适配为升降、重定向和倾斜天线阵列的铰接机构。图5示出了ragu 100,其包括适配为从基座102升起天线阵列112并从而增强其可达范围的交叉剪部135。交叉剪部135也可以改变天线阵列的取向和倾斜。在又一些实施例中,ragu 100可使用交叉剪部135(如图6所示)或使用任何其它升降机构来整体提升离开地面138。
63.在一些实施例中,ragu的传输孔径可以动态地改变。例如,孔径可以以扇形构造、手风琴式延伸或根据折纸图案展开。ragu的机械地可伸缩、可折叠且可调节的孔径使其更紧凑,由此使其能够更容易地四处移动并穿过角落、不平坦的地面、台阶高度和难以到达的区域。
64.图7a示出了根据本发明的一个实施例的包括8个示例性的扇形子阵列3021、3022...3028的可伸缩天线阵列300。图7a示出了处于缩回模式的阵列300,而图7b示出了处于完全展开模式的天线阵列300。扇形天线阵列使用马达310缩回和展开。各个子阵列被示出为包括多个发送元件104。
65.图7c示出了根据本发明的一个实施例的包括4个示例性的矩形子阵列3021、3022...3024的可伸缩天线阵列300。可伸缩天线阵列325包括弹簧加载的铰链318。各个子阵列被示出为包括多个发送元件104。图7c示出了处于展开(未折叠)模式的天线阵列325。应当理解,天线阵列325可以使用马达310和绳315来置于折叠模式。
66.图7d示出了根据本发明的一个实施例的包括4个示例性的矩形子阵列3021、3022...3024的可伸缩天线阵列335。可伸缩天线阵列335包括使得天线阵列能够缩回或展开的齿轮338和马达40。各个子阵列被示出为包括多个发送元件104。图7d示出了处于展开模式的天线阵列335。应当理解,天线阵列335可以使用马达340和齿轮338来置于折叠模式。
67.图7e示出了根据本发明的另一实施例的包括6个示例性的矩形子阵列3021、3022...3026的可伸缩天线阵列300。可伸缩天线阵列335适配为使用折纸图案折叠和展开。图7f示出了部分折叠的天线阵列345。图7g示出了进一步折叠之后的图7g的天线阵列345。
68.ragu适配为监测其能量状态,并且定位和识别用于对其内部能量存储系统充电的各种电源,诸如坞站、感应充电板或壁装电源插座。在一个实施例中,ragu使用其图像获取系统(诸如相机)或其它传感器来定位壁装电源插座。布置在ragu内的自铰接臂可将电线插入插座,以启动充电过程。为了找到壁装电源插座,ragu使用相机和图像识别算法。一旦电插座被定位,ragu就朝向插座移动。铰接臂包括调节插头高度的线性台和将插头的角度调节到插座的角度的旋转机构。一旦成像系统确认插头与插座对齐,ragu就朝向墙壁靠近,直到插头插入壁装电源插座中为止。图8示出了具有自铰接臂165的ragu 100,该自铰接臂适配为将布置在臂165的端部处的连接器167插到插座,从而对ragu的内部电池充电。
69.在一些实施例中,漫游且铰接单元适配为接收gu作为附件,从而形成ragu。漫游且铰接单元可以用于除了无线功率输送之外的各种应用。当用户决定使用漫游且铰接单元来向目标装置无线地输送功率时,用户将gu安装在漫游且铰接单元的顶面上。图9示出了gu 200(具有天线阵列112),其被定位为安装在漫游且铰接单元160的顶面168上。当这样安装时,设置在gu 200的背面202上的电连接器(未示出)与设置在漫游且铰接单元的顶面168上的对应连接器(未示出)进行电连接,以便向gu 200提供电功率。在一些实施例中,安装部件包括用于升降和倾斜gu的机构,诸如交叉剪部,如图10所示。
70.为了定位其自身以实现最大功率输送,在一个示例性实施例中,ragu从第一位置多次向目标装置传输功率,其中每次这种传输发生在ragu旋转一定量之后。在每次这样的旋转和传输之后,ragu等待从目标装置接收表示由目标装置所回收的功率量的信息。因此,ragu知道针对第一位置处的各个旋转量目标装置所回收的功率量。ragu然后沿着向目标装置提供最大功率输送的角旋转移动到更靠近目标装置的第二位置。ragu然后多次重复从第二位置向目标装置传输功率的过程,每次在旋转一定量并且从目标装置接收表示由目标装置回收的功率量的信息之后。ragu然后从第二位置沿着向目标装置提供最大功率输送的角旋转朝向目标装置移动。ragu继续重复以下过程:传输功率、原地旋转、接收指示从装置返回的接收功率水平的信息、以及确定要移向的最佳方向,直到其找到期望的功率输送位置为止。在一个实施例中,ragu在各两个连续位置之间的行进距离由目标装置所回收(或接收)的功率的相对量来确定。例如,当装置所接收的功率相对较低时,ragu行进相对较长的距离。相反,当装置所接收的功率相对较高时,ragu行进相对较短的距离。
71.根据另一示例性实施例,为了找到为目标装置供电的合适位置,ragu从初始位置多次向目标装置传输功率,其中每次这样的传输发生在ragu旋转一定量之后。在每次这样的旋转和传输之后,ragu等待从目标装置接收表示装置所回收的功率量的信息。ragu然后沿着与提供最大功率的方向不同的方向移动到第二位置。当在第二位置时,ragu多次向目标装置传输功率,其中每次这样的传输发生在ragu旋转一定量之后。在每次从第二位置进行这样的旋转和传输之后,ragu等待从目标装置接收表示装置所回收的功率量的信息。在了解了来自两个不同位置的产生最大功率输送的两个不同角度的情况下,ragu使用三边测量算法来近似目标装置的最佳位置,并移动到该最佳位置以便为装置供电。当使用彼此通信的多个ragu来在较短的时间段内对装置进行无线充电时,也可以执行三边测量算法。
72.由ragu将电磁波聚焦在目标装置上可以与ragu的机械移动一起执行。换言之,除了控制和改变天线阵列的各个发送元件的相位之外,ragu及其天线阵列的机械移动也可用来实现聚焦操作。机械移动可以与相位调节同时发生,或者在执行电磁相位和振幅调节之后发生。
73.图11示出了第一位置a,其中ragu就从该第一位置向目标装置传输功率n次(n是大于1的整数),每次传输都是在保持在点a处的同时绕z轴旋转给定量之后。假设在从点a进行的n次功率传输中,如由目标装置记录并中继回ragu的最大功率输送沿着方向p1发生。ragu然后沿着不同于p1的方向移动到新位置b。当保持在点b时,ragu向目标装置传送功率m次(m是大于1的整数,可以等于或不等于n),每次传输都是在绕z轴旋转给定量之后。假设在从点b进行的m次功率传输中,如由目标装置记录并中继回ragu的最大功率输送沿着方向p2发生。基于该信息,ragu估计目标装置位于沿着方向p1和p2绘制的线相交的点t处。本文所述的过程和在确定目标装置的位置和/或用于向目标供电的最佳角度时获得的信息表示ragu的测量辐射图案,并且可用于ragu的后续校准和控制。
74.图12a示出了根据本发明的一个示例性实施例的ragu 400的各个部件。ragu 400被示出为部分地包括无线功率发送器402、电池404、无线收发器406、处理和控制单元408、多个传感器410以及一个或多个机械致动器412。
75.无线功率发送器402包括发送天线阵列(诸如图2a所示的天线阵列112)以及用于控制也在图2a中示出的单独发送元件104的相位的关联电路(未示出)。无线收发器106被配置为建立与目标装置的通信链路并且包括无线发送器和接收器。例如,表示目标装置从ragu接收的功率量的信息经由无线收发器406提供回ragu。处理和控制单元408被配置为除了其他功能之外还控制发送元件104的相位,确定ragu对目标装置充电的角度和/或位置,控制致动器412的动作,控制ragu的线性和旋转运动,处理由传感器接收的数据等。传感器410可包括惯性测量单元(imu),该惯性测量单元又可包括加速度计、陀螺仪、磁强计以及其他传感器(诸如gps、多普勒雷达、一个或多个相机、lidar、超声、碰撞传感器、里程表等),以确定ragu相对于例如目标装置、墙壁、家具以及定位于ragu所处的有限区域内的任何其他物体的位置和取向。致动器412适配为除了别的之外还升降ragu或其天线阵列,倾斜天线阵列,折叠/展开天线阵列,将ragu插入壁装电源插座等,如上所述。图12b示出了根据本发明的另一实施例的ragu 450的各个组件。ragu450类似于ragu 400,除了ragu 450包括用于对ragu进行感应充电的感应充电接收器414,也如上文参照图3所述。
76.在ragu的一些实施例中布置的多普勒雷达测量ragu相对于静止物体的速度。ragu也可使用多普勒雷达来确定ragu相对于墙壁、家具和其它物体的相对角度。多普勒雷达还可以用于例如与墙壁保持一定距离,或者与墙壁平行地运行。多普勒雷达还可用于通过发送rf信号并检测房间中的墙壁、家具等的反射来映射房间。由ragu的移动引起的信号的多普勒频移也可用于定位房间中存在的障碍物。
77.当包括多普勒雷达的ragu漫游时,它可以创建合成孔径。因此,ragu可以作为具有与其漫游的房间一样大的合成孔径的合成孔径雷达来操作,由此创建房间的准确全息图像。通过使用经由ragu的发送天线阵列进行的波束成形、经由其无线收发机(参见图12a)实现的信号接收能力、其平移运动及其多普勒雷达,ragu可通过处理由皮肤的细微运动(诸如由于心跳引起的运动)引起的多普勒频移来检测房间中的人(和/或其他活生物体和宠物)
的位置,并映射其存在。例如,使用多普勒雷达,ragu可检测人是否跌倒、居民的个体居住者的心率是否显著改变等等。
78.通过创建房间的全息图像并映射其人类居住者的位置,ragu进一步适配为为可放置在房间中的诸如扬声器的许多其他装置找到最佳位置。例如,在一个实施例中,ragu可在通过扬声器播放音乐时在房间周围携带扬声器,同时通过映射房间中的人来主动地找到扬声器的理想位置。为了实现这一点,ragu使用其多普勒雷达来检测人的位置。接着,多普勒雷达通过检测由扬声器生成的声波在人的皮肤上产生的振动来提供表示均衡程度的信息并且由此提供表示扬声器的最佳位置的信息。例如,ragu的多普勒雷达可以为一对扬声器识别一对最佳位置,当扬声器发送声波时,该最佳位置例如引起相同的皮肤振动。
79.在一些应用中,扬声器可以具有其自己的机动车辆。ragu可以通过检测扬声器在移动到不同位置时在人的皮肤上生成的振动来找到用于这种扬声器的合适位置。通过将检测到的振动程度与校准阶段期间生成的值进行比较,ragu可由此找到扬声器的最佳位置。因此,与依赖于麦克风来执行均衡并确定扬声器系统的最佳位置的常规音频系统相比,根据本发明的实施例的ragu的多普勒雷达使用人的皮肤振动来找到扬声器系统的最佳位置,以实现声音均衡。扬声器也可以由ragu充电。
80.在一些实施例中,ragu使用其从其多普勒雷达接收的信息以及其从诸如相机、lidar、超声、碰撞传感器、里程表等其他传感器接收的信息来映射其对装置充电的位置。通过将ragu从围绕有限区域的各次行程中生成的映射数据与来自先前行程的映射数据进行比较,ragu适配为构建在其操作的区域内的墙壁、椅子、玩具、门等的高度准确且先进的模型。这又使得ragu能够有效地到达已知装置并且定位用于到各个这种装置的最大功率传送的最佳位置。
81.图13是示出了根据本发明的一个实施例的、ragu如何对目标装置充电的流程图500。在502,目标装置(本文中也称为回收装置、回收单元或ru)发送功率请求。在504,ragu生成要充电的装置的优先级列表。在506,ragu移向充电优先级被确定为最高的第一ru。在508,ragu优化其位置、取向和倾斜,以将由其发送天线阵列生成的波束朝向第一装置聚焦。在510,ragu对第一装置充电并将第一装置从其充电列表划掉。在512,ragu确定其是否具有足够的电荷来为优先级列表上的下一个装置供电。如果ragu在512确定其具有足够的电荷来为下一装置供电,则在514,ragu移向下一装置,并且在508,ragu优化其位置、取向和倾斜,以便将由其发送天线阵列生成的波束朝向下一装置聚焦,并且然后在510重复该过程。如果ragu在512确定其没有足够的电荷来为第二装置供电,则ragu在516移向充电站,并在518为其电池充电。其后,ragu在514移向下一装置并且在508重复该过程,如上所述。
82.在一些实施例中,ragu可使用各种机制来识别ru,诸如可由布置在ragu中的相机或图像捕捉获取装置识别的预定图案(黑白、灰度和/或彩色)。在又一些实施例中,ragu可以使用条形码或者具有可识别的形状或图案并且形成在ru上的任何其他标签来标识ru。在一些实施例中,ragu还可具有接收天线阵列,该接收天线阵列可与其发送天线阵列一起使用,以执行用于映射和位置识别的单静态、双静态或多静态感测雷达。
83.根据本发明的一个方面,ragu通过智能电话应用来控制。应用除其他之外使用户能够例如根据哪些目标装置要被充电来分配优先级,和/或向ragu提供关于何时在用户的家/办公室/商店的某些区域中操作和何时不操作的指令。例如,用户可指示ragu在下午10
点之前不对客厅和厨房中的装置充电,或者可指示ragu在即将到来的周末不在客厅中操作,因为朋友将睡在沙发上。这使得用户能够在他们离开他们的家或在城镇外时跟踪他们的装置和ragu。
84.通过该应用,用户还可向ragu通知ragu在其中操作的场所,诸如家、办公室等。例如,用户可能决定在白天将他/她的ragu带到办公室,而在晚上将其带回家中。应用使用户能够实现这一点,使得ragu知道其行踪,并由此可使用其先前存储的映射数据来对装置充电。
85.根据本发明的实施例,ragu还适配为跟踪其对各个装置充电的频率,并经由应用将该信息传达给用户。例如,如果之前每6个月请求由ragu充电的烟雾检测器变为每6周进行一次该请求,则其电池可能需要更换。通过记录这样的数据并经由应用将其报告给用户,用户就意识到烟雾检测器电池可能需要更换。
86.在一个实施例中,ragu可以是空中交通工具,诸如气球、无人机等。在其他实施例中,gu可以安装在空中交通工具上,并且使用其内部电池或者机载装置的电池来无线地为目标装置供电,该机载装置的电池可以是覆盖空中交通工具表面的光伏电池。这样的实施例适配为向任何飞行或静止装置提供功率。
87.根据本发明的实施例,ragu可执行许多其它功能并作为其它装置来操作,诸如播放音乐的移动扬声器、安全传感器、无线路由器和集线器、房间映射、仓库存货更新、婴儿和健康监测等。此外,gu或ragu的天线阵列是相控阵列,该阵列在与由多个目标装置形成的接收器阵列(或布置在单个目标装置中的接收器阵列)耦合时,形成可用于导航、感测和其他应用的相控阵列雷达。
88.在又一些实施例中,gu可以安装在潜水艇的表面上,并且使用从水波机械地收集的能量来为可及范围之外的其他装置和潜艇供电。
89.ragu和/或rapu适配为与其他ragu和/或rapu协作工作。例如,多个ragu可以同步且一致地操作,以提供比单独ragu的传输孔径更大的传输孔径。为了实现这一点,例如,两个或更多个ragu将它们自己导航和定位成彼此非常接近,从而形成更大的传输孔径。图14示出了三个ragu 1001、1002和1003,这些ragu移动为彼此非常接近,以形成相对较大的传输孔径。换言之,组合天线阵列1121、1122和1123的传输孔径大于单独天线阵列1121、1122和1123中的每一个的传输孔径。ragu 1001、1002和1003之间的同步可以用若干不同的方式来实现。例如,在一个实施例中,由gu、ragu/rapu中的一个或另一有线或无线装置经由光学或rf发送器无线发送的参考时钟信号可用于使ragu的本地时钟同步,使得它们一致操作,以共同形成单独有效孔径,从而增强无线功率传送效率和功率水平。换言之,根据本发明的实施例,ragu之间的协作提供了增强的范围、功率和效率。
90.在一个实施例中,当部署多个ragu和rapu时,ragu或rapu中的一个可以充当主控方,而其余ragu和rapu作为从属方来操作。在这样的实施例中,主控方将向从属方提供全部或部分的指令和控制。在又一些实施例中,多个ragu和rapu以分散和自组织的方式操作,以作为群体智能系统来操作。
91.根据本发明的一个方面,回收装置/单元可以是漫游且铰接回收单元(raru)。由此,raru可以重新定位和重新定向自身,以最大化功率接收和回收。例如,raru可结合在壁装式远程供电装置上,并且基于装置安装于墙壁上的高度或ragu可接近raru的最小距离来
调节其接收天线阵列的角度。
92.在一个实施例中,gu天线阵列可安装在类似于支撑台灯的移动臂上。图15a示出了包括经由臂602安装在基座610上的发送器阵列112的gu 600。根据本发明的一个实施例,gu 600适配为使用致动器615和625来改变其高度、倾斜和取向,以无线地为ru 605供电。图15b示出了根据本发明的另一实施例的gu 650,其适配为使用致动器615、625、635和645来改变其高度、倾斜和取向。在一些未示出的其它实施例中,致动器的数量和移动臂的数量可以少于或多于四个,这取决于期望的自由度。
93.在一些实施例中,如上所述,gu可以使用例如轮来移动。gu可以使用轨道来自由地四处移动。图16示出了具有基座610的gu 700,该基座包括适配为在轨道604、606上移动的轮。gu 700被示出为包括致动器615、625和645。图17示出了gu 750,其包括发送阵列112、致动器615、625、645和基座610。gu 750还被示出为包括共同标识为752的多个传感器。
94.回收单元(例如,图15a和图15b所示的ru 605)向gu传送诸如接收功率量、rf功率在其天线上的分布、取向(通过使用ru的imu传感器)、请求的功率水平等的信息。gu基于从ru接收的信息和来自其自身的传感器752(包括例如imu、接近传感器、雷达(超声、rf或lidar)等)的信息,来确定gu的最优移动方向、发送阵列112的取向、倾斜、高度,并且使致动器实现这种最佳方向、取向、倾斜和高度。gu相对于ru的估计位置可用于确定gu的最佳取向,以获得向一个或多个ru的最佳功率传送。
95.图18是根据本发明的一个实施例的用于对ru无线供电的流程图800。在ru在802指示其准备好充电之后,ru在804发送功率请求。在806,gu将其rf波束聚焦在ru上。在808,ru将其取向、位置连同其从gu接收的功率和功率的焦斑尺寸一起报告给gu。如果rf波束在810被确定为满足预定聚焦条件,则不要求对gu进行调节,并且gu继续对ru充电,直到在812完成充电为止。
96.如果rf波束在810被确定为不满足预定聚焦条件,则在814接合致动器。这使得gu发送器调节其各种定位参数,诸如高度、取向、倾斜等。在816,重新聚焦gu波束。如果在818确定波束聚焦被改进,如ru所报告的,则过程移动到810。如果在818确定波束聚焦没有被改进,则在820恢复致动方向,随后在814进行致动,并且重复过程。
97.图19是根据本发明的另一实施例的用于对ru无线供电的流程图850。在ru在802指示其准备好充电之后,ru在804发送功率请求。在852,ru向gu发送表示其位置和取向的信息。如果gu在854确定ru在gu充电区内,则在856,gu确定其发送器阵列的最佳位置和取向。然后在858,接合gu致动器,从而在860使gu将其rf波束聚焦在ru上。gu功率保持聚焦在ru上,直到ru被充电为止,之后过程在870结束。如果gu在854确定ru不在gu充电区内,则在862,gu向ru发送无线充电不可能的信号,之后过程在870结束。
98.应当理解,包括但不限于pid控制器、梯度下降、人工智能、遗传算法或模拟退火的任何机器人控制算法都可以用于基于来自ru和传感器的输入来引导致动器移动,以定位gu,从而向ru进行最佳功率传送并在物体周围导航。机械取向和电子相位设置的计算可以基于最小均方(lms)最大化或最高优先级功率分配方法。
99.在一些实施例中,使用传感器(例如,雷达、lidar、超声、电场扰动传感器等)的子集,ragu可检测其周围的其他物体的移动,以改变其位置并相应地传输rf功率。例如,当检测到手接近ru移动时,ragu处理器将在用户的手到达rf波束之前关闭rf功率传送,由此使
致动器将发送器移动远离ru并使得用户能够安全地拿起电话。ragu可使用语音激活命令来开始/停止充电,向要充电的特定ru移动,移开等。
100.当多个ru要被充电时,ragu可使用任何数量的技术来为ru供电。在一个示例性实施例中,ragu将发送器定位在以最大效率和功率传送水平向具有最高优先级的ru充电的位置,同时以较低速率为其它ru供电。ru的优先级可以例如随着ru的充电状态改变而在充电过程期间动态地改变。ru优先级的改变使得ragu在必要时移动,以有效地为已经获得最高优先级的另一ru供电。
101.在另一示例性实施例中,ragu将其发送器阵列定位在无线功率传送效率至少与要充电的ru的优先级成比例的位置。例如,具有低优先级的ru可能由于其接近具有高优先级的另一ru而接收高于预定义效率水平的效率水平。
102.在一些实施例中,ragu可包括作为台灯操作的灯。灯也可以用作状态指示器。例如,光源可改变颜色、闪烁或变暗,以指示例如发送器对装置充电、发送器处于空闲模式等。照明源还可以用作无线功率传送系统的覆盖区域的指示器,其中,放置在照明区域中的ru将被充电。
103.本发明的上述实施例是例示性的而非限制性的。本发明的实施例不受可以无线充电的装置的类型的限制。鉴于本公开内容,其他的添加、减少或修改是明显的并且旨在落入所附权利要求的范围内。