1.本技术涉及车辆技术领域,特别是涉及一种避震撑杆和电单车。
背景技术:
2.目前,随着科技的进步,人们的出行方式越来越多,其中,电单车作为一种便利的交通工具,已经成为了人们主要的出行方式之一。
3.电单车是一种小型交通工具,其剩余可行驶里程与其载重具有较大的关联性。因此,仅通过电单车电池属性是不能准确确定电单车的剩余可行驶里程的,进而,如何准确确定电单车的载重是一个亟需解决的问题。
技术实现要素:
4.有鉴于此,本技术实施例提供一种避震撑杆和电单车,以有效确定电单车的载荷。
5.第一方面,提供了一种避震撑杆,所述避震撑杆包括:
6.避震撑杆主体,连接电单车的车架与车轮。
7.载重传感器,安装于所述避震撑杆主体,被配置为根据所述避震撑杆主体的形变输出反馈信号。
8.在一些优选的实施例中,所述载重传感器包括霍尔组件和磁铁,所述霍尔组件和所述磁铁中的一个与所述电单车的车架联动,所述霍尔组件和所述磁铁中的另一个与所述电单车的车轮联动。
9.在一些优选的实施例中,所述避震撑杆主体包括第一部分和第二部分,所述霍尔组件和所述磁铁中的一个与所述第一部分固定连接,所述霍尔组件和所述磁铁中的另一个与所述第二部分固定连接。
10.在一些优选的实施例中,所述第一部分为第一固定支架,所述第二部分为第二固定支架,所述霍尔组件和所述磁铁中的一个与所述第一固定支架固定连接,所述霍尔组件和所述磁铁中的另一个与所述第二固定支架固定连接。
11.在一些优选的实施例中,所述第一固定支架和所述第二固定支架分别固定于所述避震撑杆主体的两端。
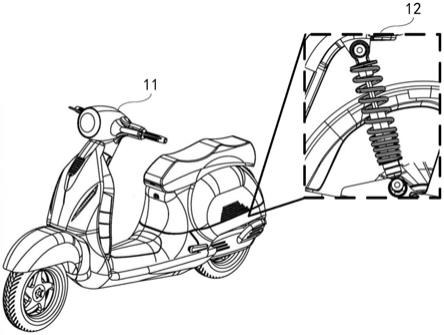
12.在一些优选的实施例中,所述避震撑杆主体包括:避震杆、套筒以及弹簧,所述套筒与所述避震杆活动连接,所述弹簧连接所述避震杆和所述套筒。
13.第二方面,提供了一种电单车,所述电单车安装有如第一方面所述的避震撑杆。
14.所述电单车还包括:
15.电池组件,为所述电单车提供电能,以及确定电池数据。
16.控制器,与所述电池组件、所述避震撑杆中的载重传感器电连接,被配置为获取所述电池数据和所述避震撑杆中的载重传感器输出的反馈信号。
17.在一些优选的实施例中,所述电单车还包括提醒装置,所述提醒装置与所述控制器电连接。
18.在一些优选的实施例中,所述提醒装置至少包括提示灯、提示音响、振动提示装置中的一项或多项。
19.在一些优选的实施例中,所述控制器还被配置为:
20.基于所述反馈信号和所述电池数据,控制所述提醒装置进行提醒。
21.在本技术实施例中,由于在电单车上设置了安装有载重传感器的避震撑杆,所以,当电单车的载重发生变化时,用于连接电单车车架与车轮的避震撑杆主体会发生形变,然后,安装于避震撑杆主体的载重传感器会根据避震撑杆主体的形变输出反馈信号,这样,就可以准确的检测电单车的载重。
附图说明
22.通过以下参照附图对本技术实施例的描述,本技术实施例的上述以及其它目的、特征和优点将更为清楚,在附图中:
23.图1为安装有本技术实施例避震撑杆的电单车的示意图;
24.图2为本技术实施例避震撑杆主体的安装方式的示意图;
25.图3为本技术实施例避震撑杆主体的另一种安装方式的示意图;
26.图4为本技术实施例安装有霍尔组件的避震撑杆的示意图;
27.图5为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图;
28.图6为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图;
29.图7为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图;
30.图8为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图;
31.图9为本技术实施例的一种电压和避震撑杆形变量之间对应关系的示意图;
32.图10为本技术实施例的一种校验初始反馈电压的流程图;
33.图11为本技术实施例电单车各部分连接方式的示意图。
34.图中,11、电单车;12、避震撑杆;21、避震杆;22、套筒;23、弹簧;31、避震杆;32、套筒;33、弹簧;41、避震杆;42、套筒;43、第一固定支架;44、第二固定支架;45、磁铁;46、霍尔组件;51、避震杆;52、套筒;53、第一固定支架;54、第二固定支架;55、磁铁; 56、霍尔组件;61、避震杆;62、套筒;63、第一固定支架;64、第二固定支架;65、磁铁;66、霍尔组件;71、避震杆;72、套筒;73、第一固定支架;74、第二固定支架;75、磁铁;76、霍尔组件;81、避震杆;82、套筒;83、磁铁;84、霍尔组件;111、控制器;112、电池组件;113、避震撑杆。
具体实施方式
35.以下基于实施例对本技术进行描述,但是本技术并不仅仅限于这些实施例。在下文对本技术的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本技术。为了避免混淆本技术的实质,公知的结构并没有详细叙述。
36.此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。
37.除非上下文明确要求,否则在说明书的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
38.在本技术的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
39.为了能够准确确定电单车的载重,本技术实施例提供一种避震撑杆,该避震撑杆可以安装于电单车并用于检测电单车的载重,具体的,如图 1所示,图1为安装有本技术实施例避震撑杆的电单车的示意图,其中,该示意图包括:电单车11以及安装于电单车11的避震撑杆12。
40.在本技术实施例中,电单车11可以是家用多轮电单车(例如家用两轮电单车),也可以是共享多轮电单车(例如共享两轮电单车),本技术实施例以两轮电单车进行举例说明。
41.避震撑杆12是一种弹性的连接件,可用于连接电单车的车轮与车架。
42.以两轮电单车为例,在一种情况下,避震撑杆12可以用于连接电单车11的后轮与车架。在另一种情况下,避震撑杆12也可以用于连接电单车11的前轮与车架。在另一种情况下,避震撑杆12还可以既连接电单车11的后轮与车架,也连接电单车11的前轮与车架(也就是说,在此情况下,电单车11包括两个避震撑杆12,其中一个用于连接后轮与车架,另一个用于连接前轮与车架)。
43.当然,避震撑杆12也可以用于其它类型的电单车,以三轮电单车为例,本技术实施例可以通过在三轮电单车内设置一个或多个避震撑杆 12来检测该三轮电单车的载重。
44.在本技术实施例中,避震撑杆12包括避震撑杆主体和载重传感器,其中,避震撑杆主体连接电单车的车架与车轮,载重传感器安装于避震撑杆主体,被配置为根据避震撑杆主体的形变输出反馈信号。
45.也就是说,当电单车的载重发生变化时(例如当骑行者坐上电单车时),电单车的车架与车轮之间的距离会发生改变,然后,用于连接电单车车架与车轮的避震撑杆主体会随之变形,然后,载重传感器能够基于避震撑杆主体的形变输出反馈信号。该反馈信号可以用于确定电单车的载重。
46.在本技术实施例中,由于在电单车上设置了安装有载重传感器的避震撑杆,所以,当电单车的载重发生变化时,用于连接电单车车架与车轮的避震撑杆主体会发生形变,然后,安装于避震撑杆主体的载重传感器会根据避震撑杆主体的形变输出反馈信号,这样,就可以准确的检测电单车的载重。
47.下面将结合具体实施方式,对本技术实施例的一种避震撑杆进行详细的说明,其中,避震撑杆包括避震撑杆主体和载重传感器,避震撑杆主体连接电单车的车架与车轮,载重传感器安装于避震撑杆主体,被配置为根据避震撑杆主体的形变输出反馈信号。
48.针对避震撑杆主体,在一种优选的实施方式中,避震撑杆主体可以包括避震杆、套筒以及弹簧。其中,套筒可以套在避震杆外部,弹簧可以连接避震杆和套筒。
49.如图2所示,图2为本技术实施例避震撑杆主体的安装方式的示意图,该示意图包括:避震杆21、套筒22以及弹簧23。
50.由图2可知,在本实施例中,套筒22可以套在避震杆21的外部,以实现避震杆21和套筒22的活动连接,当避震撑杆主体受力压缩时,避震杆21和套筒22将互相靠近。
51.弹簧23可以套在避震杆21和套筒22外部,当避震撑杆主体处于压缩状态时,弹簧
23可以提供反向的作用力,以使得避震撑杆主体在不受到外部作用力时回弹。
52.如图3所示,图3为本技术实施例避震撑杆主体的另一种安装方式的示意图,该示意图包括:避震杆31、套筒32以及弹簧33。
53.由图3可知,在本实施例中,套筒32可以套在避震杆31的外部,以实现避震杆31和套筒32的活动连接,当避震撑杆主体受力压缩时,避震杆31和套筒32将互相靠近。
54.弹簧33的一端可以与套筒32底部内壁固定连接,另一端可以与避震杆31的一端固定连接,当避震撑杆主体处于压缩状态时,弹簧33可以提供反向的作用力,以使得避震撑杆主体在不受到外部作用力时回弹。
55.在本技术实施例中,避震撑杆主体也可以是除图2、图3以外其它适用的结构。
56.针对载重传感器,在一种优选的实施方式中,载重传感器可以包括霍尔组件和磁铁,其中,霍尔组件和磁铁中的一个与电单车的车架联动,霍尔组件和磁铁中的另一个与电单车的车轮联动。
57.其中,霍尔组件至少包括霍尔元件和运算放大器,霍尔元件一种基于霍尔效应的磁传感器,用霍尔元件可以检测磁场及其变化,可在各种与磁场有关的场合中使用。运算放大器是具有很高放大倍数的电路单元,在实际电路中,通常结合反馈网络共同组成某种功能模块(在本技术实施例中可以与霍尔元件组成霍尔组件),它是一种带有特殊耦合电路及反馈的放大器。其输出信号可以是输入信号加、减或微分、积分等数学运算的结果。
58.在本技术实施例中,霍尔组件和磁铁可以通过额外结构与避震撑杆主体固定连接,霍尔组件和磁铁也可以直接安装在避震撑杆主体。
59.在一种优选的实施方式中,避震撑杆主体可以包括第一部分和第二部分,霍尔组件和磁铁中的一个与第一部分固定连接,霍尔组件和磁铁中的另一个与第二部分固定连接。
60.其中,第一部分和第二部分即为上述额外结构,该额外结构用于连接避震撑杆主体与载重传感器,在实际应用中,第一部分和第二部分可以是支架结构的部件,也可以是其它结构的部件。
61.在一种优选的实施方式中,第一部分为第一固定支架,第二部分为第二固定支架,霍尔组件和磁铁中的一个与第一固定支架固定连接,霍尔组件和磁铁中的另一个与第二固定支架固定连接。
62.例如,如图4所示,图4为本技术实施例的一种安装有霍尔组件的避震撑杆的示意图,其中,该示意图包括:避震杆41、套筒42、第一固定支架43、第二固定支架44、磁铁45和霍尔组件46。
63.如图4所示,避震撑杆主体包括避震杆41、套筒42、第一固定支架43和第二固定支架44,载重传感器包括磁铁45和霍尔组件46。其中,第一固定支架43与避震杆41固定连接,而且,第一固定支架43的一端还安装有霍尔组件46,第二固定支架44与套筒42固定连接,而且,第二固定支架44的一端还安装有磁铁45。
64.在骑行者坐在电单车上之后,由于至少受到了骑行者体重的作用,避震撑杆主体会收紧,同时,由于第一固定支架43、第二固定支架44 分别与避震杆41、套筒42固定连接,所以,第一固定支架43和第二固定支架44会随着避震撑杆主体的收紧而靠近,进而,可以使得磁铁45 与霍尔组件46之间产生相对移动,即在霍尔组件46周围产生了变化的磁场。然
后,霍尔组件46可以基于变化的磁场输出反馈信号。
65.需要说明的,图4仅为本技术实施例的一种举例,在实际应用中,第一固定支架43和第二固定支架44也可以安装在避震撑杆主体其它适用的位置,磁铁45也可以安装在第一固定支架43,霍尔组件46也可以安装在第二固定支架44。
66.当电单车承受载荷时,如图5所示,图5为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图,其中,该示意图包括:避震杆51、套筒52、第一固定支架53、第二固定支架54、磁铁55和霍尔组件56。
67.如图5所示,避震撑杆主体包括避震杆51、套筒52、第一固定支架53和第二固定支架54,载重传感器包括磁铁55和霍尔组件56。其中,第一固定支架53与避震杆51固定连接,而且,第一固定支架53的一端还安装有霍尔组件56,第二固定支架54与套筒52固定连接,而且,第二固定支架54的一端还安装有磁铁55。
68.结合图4和图5所示的内容,图4为放松状态下的避震撑杆(即电单车没有受到载荷时避震撑杆的状态),图5为收紧状态下的避震撑杆 (即电单车受到载荷时避震撑杆的状态)。
69.通过图4和图5的对比可知,避震撑杆从放松状态到收紧状态的过程中,磁铁与霍尔组件之间会发生相对运动,通过磁铁与霍尔组件之间的相对运动可以使得霍尔组件检测到变化的磁场,进而基于该变化的磁场输出反馈信号。
70.在一种优选的实施方式中,第一固定支架和第二固定支架分别固定于避震撑杆主体的两端。
71.例如,如图6所示,图6为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图,其中,该示意图包括:避震杆61、套筒62、第一固定支架63、第二固定支架64、磁铁65和霍尔组件66。
72.如图6所示,避震撑杆主体包括避震杆61、套筒62、第一固定支架63和第二固定支架64,载重传感器包括磁铁65和霍尔组件66。其中,第一固定支架63与避震杆61固定连接,而且,第一固定支架63的一端还安装有霍尔组件66,第二固定支架64与套筒62固定连接,而且,第二固定支架64的一端还安装有磁铁65。
73.在骑行者坐在电单车上之后,由于至少受到了骑行者体重的作用,避震撑杆主体会收紧,同时,由于第一固定支架63、第二固定支架64 分别与避震杆61、套筒62固定连接,所以,第一固定支架63和第二固定支架64会随着避震撑杆主体的收紧而靠近,进而,可以使得磁铁65 与霍尔组件66之间产生相对移动,即在霍尔组件66周围产生了变化的磁场。然后,霍尔组件66可以基于变化的磁场输出反馈信号。
74.需要说明的,图6仅为本技术实施例的一种举例,在实际应用中,磁铁65也可以安装在第一固定支架63,霍尔组件66也可以安装在第二固定支架64。
75.当电单车承受载荷时,如图7所示,图7为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图,其中,该示意图包括:避震杆71、套筒72、第一固定支架73、第二固定支架74、磁铁75和霍尔组件76。
76.如图7所示,避震撑杆主体包括避震杆71、套筒72、第一固定支架73和第二固定支架74,载重传感器包括磁铁75和霍尔组件76。其中,第一固定支架73与避震杆71固定连接,而且,第一固定支架73的一端还安装有霍尔组件76,第二固定支架74与套筒72固定连接,而
且,第二固定支架74的一端还安装有磁铁75。
77.结合图6和图7所示的内容,图6为放松状态下的避震撑杆(即电单车没有受到载荷时避震撑杆的状态),图7为收紧状态下的避震撑杆 (即电单车受到载荷时避震撑杆的状态)。
78.通过图6和图7的对比可知,避震撑杆从放松状态到收紧状态的过程中,磁铁与霍尔组件之间会发生相对运动,通过磁铁与霍尔组件之间的相对运动可以使得霍尔组件检测到变化的磁场,进而基于该变化的磁场输出反馈信号。
79.在另一种优选的实施方式中,载重传感器中的磁铁与霍尔组件也可以直接安装在避震撑杆主体,如图8所示,图8为本技术实施例的另一种安装有霍尔组件的避震撑杆的示意图,其中,该示意图包括:避震杆 81、套筒82、磁铁83和霍尔组件84。
80.如图8所示,避震撑杆主体包括避震杆81、套筒82,载重传感器包括磁铁83和霍尔组件84。其中,避震杆81的一端安装有磁铁83,套筒82的内壁安装有霍尔组件84。
81.在骑行者坐在电单车上之后,由于至少受到了骑行者体重的作用,避震撑杆主体会收紧,所以,避震杆81和套筒82会随着避震撑杆主体的收紧而靠近,进而,可以使得磁铁83与霍尔组件84之间产生相对移动,即在霍尔组件84周围产生了变化的磁场。然后,霍尔组件84可以基于变化的磁场输出反馈信号。
82.需要说明的,图8仅为本技术实施例的一种举例,在实际应用中,磁铁83也可以安装在套筒82内壁,霍尔组件84也可以安装在避震杆 81一端。
83.通过上述各实施例所述的避震撑杆,当电单车的载重发生变化时,用于连接电单车车架与车轮的避震撑杆主体会发生形变,然后,安装于避震撑杆主体的载重传感器会根据避震撑杆主体的形变输出反馈信号,这样,就可以准确的检测电单车的载重。
84.进而,本技术实施例提供一种电单车,该电单车安装有如上述任一实施例所述的避震撑杆。
85.在一种优选的实施方式中,上述电单车还可以包括电池组件和控制器。其中,电池组件可以为电单车提供电能,以及确定电池数据。控制器可以与电池组件、避震撑杆中的载重传感器电连接,被配置为获取电池数据和避震撑杆中的载重传感器输出的反馈信号。
86.当控制器获取到电单车电池组件确定的电池数据和避震撑杆中的载重传感器输出的反馈信号后,控制器可以基于该电池数据和反馈信号确定电单车的剩余可行驶里程。其中,该反馈信号可以是霍尔组件输出的反馈电压。
87.具体的,控制器可以基于反馈信号确定电单车的当前阻力,基于电池数据确定电单车的当前电池容量,然后,基于当前阻力和当前电池容量,确定电单车的当前剩余行驶里程。
88.针对电单车的当前阻力,在一种优选的实施方式中,电单车中的控制器在获取载重传感器输出的反馈信号后,可以基于反馈信号和预先设置的对应关系,确定反馈信号对应的避震撑杆的当前形变量,然后,基于当前形变量和预定弹性系数,确定当前载重数据,然后,基于当前载重数据,确定电单车所受的当前阻力。
89.其中,预先设置的对应关系为反馈信号和避震撑杆形变量之间的对应关系。
90.以反馈信号为反馈电压为例,如图9所示,图9为本技术实施例的一种电压和避震撑杆形变量之间对应关系的示意图,该示意图包括用于表征避震撑杆形变量的横坐标(单
位为毫米)和用于表征电压的纵坐标 (单位为伏特)。
91.其中,当避震撑杆的形变量为0时,即对应电单车上的载荷为0时,此时的电压为载重传感器的初始反馈电压。随着避震撑杆的形变量升高,即随着对应电单车上的载荷升高,载重传感器的反馈电压随之增高。
92.也就是说,不同的避震撑杆形变量分别对应了不同的反馈电压,进而,本技术实施例可以基于载重传感器的当前反馈电压来确定避震撑杆的当前形变量,进而根据当前形变量确定当前载重数据。
93.具体的,当前载重数据可以基于如下公式确定:
94.m=k*x
95.其中,m用于表征当前载重数据,k用于表征预定弹性系数,x用于表征当前形变量。
96.在实际应用中,由于载重传感器安装于避震撑杆主体,所以,当避震撑杆主体发生形变时,载重传感器可以向控制器实时反馈信号,然后,控制器可以基于上述对应关系确定反馈信号对应的避震撑杆形变量,然后基于该形变量确定电单车的载荷(即当前载重数据)。通过本技术实施例,可以通过载重传感器实时反馈的信号来确定电单车当前承受的载荷,保证了当前载重数据的时效性。
97.另外,由上述实施方式可知,当前载重数据的精确度取决于载重传感器所反馈的电压的精确度,因此,在本技术实施例中还可以对载重传感器的初始反馈电压进行校验,具体的,如图10所示,图10为本技术实施例的一种校验初始反馈电压的流程图,具体包括如下步骤:
98.在步骤101,确定初始反馈电压。
99.其中,初始反馈电压为避震撑杆的形变量等于0时载重传感器的反馈电压。
100.在步骤102,判断初始反馈电压是否超出预定初始电压范围,若初始反馈电压超出预定初始电压范围,则执行步骤103,若初始反馈电压未超出预定初始电压范围,则执行步骤104。
101.其中,由于当前载重数据的精确度取决于霍尔组件所反馈的电压的精确度,所以通过对初始反馈电压的校验可以检验载重传感器是否精确。
102.在步骤103,发送故障信息。
103.若初始反馈电压超出了预定初始电压范围,则表征载重传感器的精度出现问题,进而,控制器可以向外部发送故障信息,该故障信息可以用于报告载重传感器精确度出现偏差。例如,控制器可以向电单车服务平台的服务器发送故障信息,以使得电单车服务平台派遣维护人员进行现场维护。
104.在步骤104,判断当前车速是否大于预定车速,若当前车速大于预定车速,则执行步骤105,若当前车速小于等于预定车速,则执行步骤 104。
105.若初始反馈电压未超出预定初始电压范围,则表征载重传感器的精度正常,即可以用于确定当前载重数据。
106.更进一步的,为了使控制器获取有效的当前载重数据,可以对电单车的当前车速进行判断。
107.在电单车行驶之前,骑行者往往没有坐稳,即电单车所受的载荷会有较大波动,也就是说,当电单车的当前车速过低时(即电单车还处于未行驶的状态),该电单车的当前载
重数据没有参考价值。
108.相反的,在电单车行驶的过程中,骑行者往往处于较为静止的状态,即电单车所受的载荷相对稳定,也就是说,当电单车的当前车速大于一定阈值时,该电单车的当前载重数据具有较高的参考价值。
109.因此,在本技术实施例中,可以在确定当前反馈电压之前对当前车速进行判断,若当前车速大于预定车速,则确定当前反馈电压并基于该当前反馈电压确定当前载重数据。其中,当前反馈电压即为控制器实时获取的反馈电压。
110.其中,预定车速可以是根据实际情况设置的合理数值,例如,预定车速可以是3千米/小时、4千米/小时、5千米/小时等等。
111.在步骤105,确定当前反馈电压。
112.通过本技术实施例,可以基于初始电压范围以及初始反馈电压来判断霍尔组件的精度是否正常,若霍尔组件的精度出现问题,则控制器可以发送故障信息。同时,控制器还可以对当前车速进行判断,若当前车速大于预定车速,则控制器可以确定当前反馈电压,这样,可以使得控制器确定的当前载重数据是一个参考价值较高的数据。
113.进一步的,在控制器基于反馈电压确定当前载重数据后,控制器可以基于当前载重数据,确定电单车所受的当前阻力。
114.在本技术实施例中,由于电单车是一种小型的电动交通工具,其在路面行驶时所受的最大阻力为摩擦力,因此,在本技术实施例中可以将电单车所受的摩擦力作为当前阻力,进而,可以基于如下公式确定电单车的当前阻力:
115.f=(m
user
+m
vehicle
)*g*θ
116.其中,f用于表征电单车的当前阻力,m
user
用于表征电单车的载荷,在实际应用中,电单车的载荷一般为骑行者的体重,m
vehicle
用于表征电单车的质量,电单车的可以根据电单车出厂时的型号数据预先确定,g 用于表征重力加速度,θ用于表征摩擦系数。
117.通过上述公式,可以计算出电单车在承受载荷时所受到的摩擦力,即骑行者在驾驶电单车时电单车的当前阻力,根据骑行者在驾驶电单车时电单车的当前阻力,可以准确的确定骑行者在驾驶电单车时的剩余可行驶里程。
118.另一方面,针对电单车的当前电池容量,控制器可以基于电池数据确定电单车的当前电池容量。
119.在一种优选的实施方式中,电池数据可以是电单车的控制器实时获取的当前电池电压和当前电池剩余电量,当控制器获取当前电池电压和当前电池剩余电量之后,可以基于如下公式确定电单车的当前电池容量:
120.w=v
bat
*cap
bat
121.其中,w用于表征电单车的当前电池容量,v
bat
用于表征当前电池电压,cap
bat
用于表征当前电池剩余容量。
122.在实际应用中,电池的容量会随着电池的使用而逐渐衰减,通过上述公式,可以计算电池实时的总容量,进而可以更准确的确定电单车的剩余可行驶里程。
123.在控制器确定电单车的当前阻力和当前电池容量之后,可以基于当前阻力和当前电池容量,确定电单车的当前剩余行驶里程。
124.具体的,可以基于如下公式确定电单车的当前剩余行驶里程:
125.s=w/f
126.其中,s用于表征电单车的当前剩余行驶里程,w是基于电单车当前电池数据确定的当前电池容量,f是基于电单车当前载重数据确定的电单车所受的当前阻力。
127.通过本技术实施例,可以通过安装有上述避震撑杆的电单车来获取电单车的当前载重数据,然后,可以基于当前载重数据以及电单车的当前电池数据来预测电单车的当前剩余行驶里程。由于电单车属于小重量的电动交通工具,所以,电单车的载荷是影响电单车电力消耗的重要参数(也即影响电单车当前剩余行驶里程的重要参数),进而,基于电单车的当前载重数据和当前电池数据,可以准确的预测电单车的剩余可行驶里程。
128.由于本技术实施例中电单车安装的控制器可以基于避震撑杆确定的反馈信号,以及电池组件确定的电池数据来预测电单车的剩余可行驶里程。所以,本技术实施例中的电单车还可以通过该剩余可行驶里程以及提醒装置对骑行者进行提醒,以告知骑行者可以骑行的里程。
129.具体的,电单车还包括提醒装置。其中,该提醒装置与控制器电连接,提醒装置是用于警告骑行者的装置,其可以是音频播放装置(例如安装于电单车上的音频播放器),也可以是显示装置(例如安装于电单车上的显示屏),还可以是其它适用的装置(例如安装于电单车上的车载终端)。当然,电单车上可以设置多个类型的提醒装置,例如,一辆电单车上可以同时安装音频播放装置和显示装置。
130.在一种优选的实施方式中,提醒装置可以至少包括提示灯、提示音响、振动提示装置中的一项或多项。通过上述一种或多种提醒装置,本技术实施例可以在多种情况下对骑行者进行提醒,例如,在电单车启动时,提醒装置可以提醒骑行者剩余可骑行里程,再例如,在电单车电量不足(即剩余可骑行里程过短)时,提醒装置可以进行电量不足的提醒。
131.具体的,控制器可以被配置为基于反馈信号和电池数据,控制提醒装置进行提醒。也就是说,控制器在确定反馈信号和电池数据之后,可以基于反馈信号和电池数据确定剩余可骑行里程,进而,控制器可以基于该剩余可骑行里程控制提醒装置,以实现对骑行者的提醒。
132.这样,通过安装提醒装置,可以使得本技术实施例的电单车能够在多种情况下对骑行者进行提醒,以使得骑行者获知该电单车可以骑行的里程,进而可以帮助骑行者判断是否继续驾驶该电单车。
133.综上,如图11所示,图11为本技术实施例电单车各部分连接方式的示意图。如图11所示,图11所示的电单车至少包括控制器111、电池组件112和避震撑杆113,其中,控制器111与电池组件112电连接以获取电池数据,控制器111与避震撑杆113中的载重传感器电连接以获取反馈信号。通过图11所示的连接方式,该电单车可以实现上述实施例所述的功能。
134.以上所述仅为本技术的优选实施例,并不用于限制本技术,对于本领域技术人员而言,本技术可以有各种改动和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。