1.本发明属于轨道交通技术领域,涉及基于虚拟编组的列车控制系统兼容方法。
背景技术:
2.轨道交通的互联互通要求线路能兼容不同的列车控制系统,使列车能在不同列控制式线 路下或不同厂商线路下安全运营。为此,通常需要增设相应的车载设备及线路设备,而当列 车需要在多线路、多制式的复合轨道交通网络中运行时,增设多制式的车载和线路设备将极 大提高了轨道交通的建设成本,进一步也会引起带来维修和运营成本提升的问题。
[0003][0004]
另一方面,打造安全、高效、绿色、智能的轨道交通运输体系已成为当今世界轨道交通 未来的主导发展方向,因此,为减少传统列控系统兼容方法带来的设备多、成本高、维修难 等问题,研究一种多制式轨道交通复合网络下的列车控制系统兼容新方法是一个急需解决的 问题。
技术实现要素:
[0005]
本发明的目的在于针对现有技术存在的所述不足,提出一种列车控制系统兼容方法,可 应用于多制式轨道交通复合网络下的列车协同运行与安全保障,大大减少列控系统兼容设备 的设置安装以及运营维护成本,有效推进轨道交通复合网络的安全、高效、绿色和智能化发 展。
[0006]
为达到上述目的,本发明采用的技术方案是:
[0007]
一种列车控制系统兼容方法,包括:在多制式轨道交通复合网络中的列车,除其车载既 有系统,增设车载虚拟编组控制系统;所述车载既有系统用于列车在其所属制式的线路上运 行时的功能实现;所述车载虚拟编组控制系统用于列车在不同列控制式线路上运行时,与该 线路列车进行虚拟编组,从而实现基于虚拟编组的列车控制系统兼容。
[0008]
本发明方法包括:
[0009]
1)在多制式轨道交通复合网络中的列车,除其车载既有系统,增设车载虚拟编组控制系 统。
[0010]
所述车载既有系统实现的功能包括车地通信功能、列车速度控制与防护功能、列车定位 和测速功能。
[0011]
所述车载虚拟编组控制系统包括:虚拟编组通信模块、高精度自主测速定位模块和虚拟 编组安全控制器。
[0012]
所述不同列控制式包括但不限于ctcs-2、ctcs-3、cbtc、tacs(train autonomouscircumambulate system,基于车车通信的列车自主运行系统)。
[0013]
所述虚拟编组通信模块用于车-车快速、安全和可靠通信,传输列车行车信息。
[0014]
所述行车信息包括列车运行过程中的动力学信息、轨迹信息和控制命令信息。
[0015]
所述高精度自主测速定位模块基于列车自主感知、多源信息融合技术,用于采集和提供 高精度的列车行车信息。
[0016]
所述高精度为满足多场景下(包括但不限于桥梁、隧道、恶劣天气)的虚拟编组列车厘 米级追踪精度。
[0017]
所述虚拟编组安全控制器利用前车的行车信息,生成本车(异制列车)在虚拟组编过程 中的速度控制策略、虚拟组编后编队运行的协同控制策略以及虚拟解编过程中的速度控制策 略。
[0018]
优选地,所述虚拟编组安全控制器还用于生成虚拟编组全过程的列车速度安全防护策略。
[0019]
所述前车为该异制列车运行前方最邻近的列车。
[0020]
所述异制列车为即将驶入与自身列控制式相异的线路的列车。
[0021]
2)当不同列控制式的列车需要在一单制式线路上运行时,与该线路制式相异的列车(异 制列车)提前启动所述虚拟编组通信模块,与其前车交互行车信息。
[0022]
若该异制列车的前车为领车,则:
[0023]
(1)该异制列车向领车发出组编请求;
[0024]
(2)领车接收到该异制列车的行车信息及组编请求;
[0025]
(3)领车通过既有车地通信模块向辖内调度中心发送组编确认;
[0026]
(4)辖内调度中心审批同意;
[0027]
(5)领车通过所述虚拟编组通信模块向该异制列车发送组编同意信息。
[0028]
若该异制列车的前车为编组车,则:
[0029]
该异制列车首先向该编组车发送组编请求,该编组车向其运行方向上的邻车转发该组编 请求,该组编请求沿虚拟编队运行方向持续转发,直至发送至领车,转至步骤(2)~(4), 然后领车通过所述虚拟编组通信模块向其邻近编组车发送组编同意信息,由该编组车沿虚拟 编队运行反方向转发组编同意信息,直至最后转发至该异制列车。
[0030]
通过所述虚拟编组通信模块,该异制列车接收到源自领车的组编同意信息后,该异制列 车向辖内调度中心发送组编确认信息。
[0031]
所述领车为能与所在运行线路的地面调度中心取得通信的列车。
[0032]
所述组编请求需经过列车辖内调度中心审批同意方可发送。
[0033]
所述既有车地通信模块的种类包括但不限于:轨道电路、gsm-r无线通信、车载无线电 台(wlan)、tetra数字集群移动通信、lte-r无线通信。
[0034]
所述编组车为已与领车完成虚拟编组的列车。
[0035]
所述虚拟编队为已经虚拟编组在一起的所有列车所形成的列车队列。
[0036]
3)该异制列车到达执行点后,与辖内调度中心通信断开,开始进入虚拟组编阶段。在此 阶段该异制列车继续利用所述虚拟编组通信模块继续与前车保持快速、安全和可靠的车-车通 信,从而实时获取前车的行车信息,利用该行车信息,虚拟编组安全控制器对虚拟组编过程 中该异制列车的速度和安全以相应的策略进行控制和防护,从而使该异制列车快速、安全地 与前车完成虚拟组编。
[0037]
所述执行点为线路区段的制式切换点,驶过执行点后,列车被迫失去与自身辖内调度中 心的通信连接。
[0038]
4)当该异制列车达到前车速度(在一定误差范围内),且该异制列车与其前车的间隔达 到虚拟组编理想间隔时,表明该异制列车正式加入前车所在的虚拟编队,即开始进入虚拟编 队运行阶段。
[0039]
在虚拟编队运行阶段,该异制列车利用所述虚拟编组通信模块快速、安全、可靠地获取 前车的行车信息,虚拟编组安全控制器对虚拟编队运行过程中该异制列车的速度和安全以相 应的策略进行控制和防护,使该异制列车平稳可靠地与前车保持安全间隔,从而实现虚拟编 队协同运行。
[0040]
所述误差范围需满足列车实施常规制动时制动距离误差为亚米级。
[0041]
所述虚拟组编理想间隔为异质列车与其前车形成虚拟编队的边界间隔,取决于异质列车 的动力学参数、相对制动距离、安全裕度和虚拟编队队内列车间隔。
[0042]
所述安全裕度是考虑信息传输延迟、机械制动延迟和列车测速定位误差所增设的间隔余 量。
[0043]
所述安全间隔为虚拟编组后编队内每两相邻列车间的安全追踪间隔,由列车自身的相对 制动距离、制动性能及该列车前车的行车信息确定。
[0044]
5)当所述虚拟编队接近道岔区段,领车向其邻车发送行车信息,该邻车向其邻车转发该 行车信息,直至所有虚拟编队内的编组车均收到该行车信息。若虚拟编队内存在主动解编车, 则该主动解编车向其邻车发送解编信息,并由该邻车转发,直至发送至领车,领车向辖内调 度中心发送解编信息,开始进入虚拟解编阶段。
[0045]
在此阶段,主动解编车及其运行后方编组车(被动解编车)继续利用所述虚拟编组通信 模块分别继续与各自的前车保持快速、安全和可靠的车-车通信,从而实时获取各自前车的行 车信息,利用该行车信息,主动解编车和被动解编车的虚拟编组安全控制器对虚拟解编过程 中的速度和安全以相应的策略进行控制和防护,从而使主动解编车和被动解编车快速、安全 地与各自前车完成虚拟解编,当与前车的距离达到虚拟解编理想间隔时,表明虚拟解编完成。
[0046]
虚拟解编完成后,领车与未解编列车构成一支较短的虚拟编队(以下简称短编队),被动 解编车与前车保持通信的同时,与该短编队也保持通信,便于后续重新归队。
[0047]
该短编队安全驶过岔区后,道岔转换方向,主动解编车继续运行。
[0048]
所述主动解编车为虚拟编队内与领车运行方向不同,在接近岔区时需要主动离开所在虚 拟编队的列车。
[0049]
所述解编信息包括主动解编车的车次信息、行车信息、解编告知信息。
[0050]
优选地,所述解编信息还包括被动解编车的车次信息、行车信息、解编告知信息。
[0051]
所述被动解编车为虚拟编队内与领车运行方向相同,但在接近岔区时被迫需要离开所在 虚拟编队的列车。
[0052]
所述虚拟解编理想间隔为虚拟编队列车解编的边界间隔,取决于解编列车的动力学参数、 绝对制动距离、安全裕度和道岔状态转换时间。
[0053]
所述安全裕度是考虑信息传输延迟、机械制动延迟和列车测速定位误差所增设的间隔余 量。
[0054]
6)当主动解编车到达执行点后,向其辖内调度中心发送通信请求信息,调度中心响应, 并返回连接同意信息,此时,主动解编车与其辖内调度中心的通信连接恢复,同时,
该主动 解编车的车载虚拟编组通信模块关闭,与邻车的通信连接断开,即与所述短编队列车和被动 解编车的通信均断开。
[0055]
7)当被动解编车驶过岔区,利用所述虚拟编组通信模块与前车保持快速、安全和可靠的 车-车通信,同时,利用虚拟编组安全控制器与所述短编队重新编组,新成新编队,新虚拟编 队继续运行。
[0056]
8)在虚拟组编阶段、虚拟编队运行阶段和虚拟解编阶段中,若有列车的虚拟编组通信模 块发生故障,导致列车间通信异常或失效,则所涉及的异质列车进入远程rm模式。
[0057]
所述远程rm模式为经地面调度中心确认的限制人工驾驶模式。
[0058]
由于采用上述技术方案,本发明提供的多制式复合轨道交通网络下的列车控制系统兼容 方法,由于只需要在多制式列车车载安装车载虚拟编组控制系统,而非安装多种制式的车载 设备,故大大降低了多制式列控系统兼容过程中所需的工程建设成本、设备成本,同时,也 大大降低了系统后期的运营维护成本,进一步有利于打造安全、高效、绿色、智能的轨道交 通运输体系。
附图说明
[0059]
图1为本发明实施例提供的基于虚拟编组的列车控制系统兼容方法的应用场景示意图。
[0060]
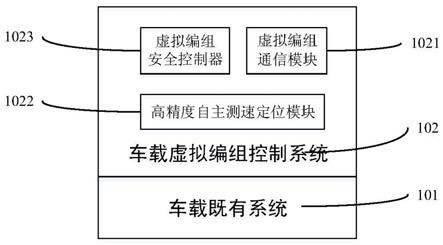
图2为本发明提供的基于虚拟编组的兼容性列车控制系统车载设备结构示意图。
[0061]
图3为本发明实施例提供的第一个列车控制系统的交互示意图。
[0062]
图4为本发明实施例提供的第二个列车控制系统的交互示意图。
[0063]
图5为本发明实施例提供的第三个列车控制系统的交互示意图。
[0064]
图6为本发明实施例提供的第四个列车控制系统的交互示意图。
[0065]
图7为本发明实施例提供的第五个列车控制系统的交互示意图。
[0066]
图8为本发明另一实施例提供的一个列车控制系统的交互示意图。
具体实施方式
[0067]
以下结合附图和具体实施例对本发明进行说明。
[0068]
图1示出了本发明提供的一个基于虚拟编组的列车控制系统兼容方法的应用场景示意 图。
[0069]
图1所示的应用场景包括四种线路制式,包括制式a、制式b、制式c和制式d;
[0070]
图1所示的应用场景还包括四列车,包括列车t_a、列车t_b、列车t_c和列车t_d, 这四列车的列控制式分别属于制式a、制式b、制式c和制式d,且所述四列车的辖内调度 中心分别为调度中心a、调度中心b、调度中心c和调度中心d。
[0071]
假设所述四种列控制式彼此均无法兼容,但
[0072]
图1所示的应用场景有不同列控制式的列车在一单制式线路上运行的需求,如
[0073]
图1中的列车t_b和列车t_c均需在一段制式d线路上运行,但列车t_b和列车t_c 的列控制式无法兼容列控制式d。
[0074]
图2示出了本发明提供的基于虚拟编组的兼容性列车控制系统车载设备结构示意图;如
[0075]
图2所示,所述基于虚拟编组的兼容性列车控制系统车载设备结构包括车载既有系统 101和车载虚拟编组控制系统102。
[0076]
所述车载既有系统101用于列车在其所属制式的线路上运行时的功能实现。
[0077]
所述功能包括车地通信功能、列车速度控制与防护功能、列车定位和测速功能。
[0078]
所述车载虚拟编组控制系统102用于列车在不同列控制式线路上运行时,与该线路列车 进行虚拟编组,从而实现基于虚拟编组的列车控制系统兼容。
[0079]
所述车载虚拟编组控制系统102包括:虚拟编组通信模块1021、高精度自主测速定位模 块1022和虚拟编组安全控制器1023。
[0080]
所述虚拟编组通信模块1021用于车-车快速、安全和可靠通信,传输列车行车信息。
[0081]
所述行车信息包括列车运行过程中的动力学信息、轨迹信息和控制命令信息。
[0082]
所述高精度自主测速定位模块1022基于列车自主感知、多源信息融合技术,用于采集、 提供高精度的列车行车信息。
[0083]
所述高精度为满足多场景下(包括但不限于桥梁、隧道、恶劣天气)的虚拟编组列车厘 米级追踪精度。
[0084]
所述虚拟编组安全控制器1023利用前车的行车信息,生成异制列车在虚拟组编过程中的 速度控制策略、虚拟组编后编队运行的协同控制策略和虚拟解编过程中的速度控制策略。
[0085]
在其它优选的实施例中,所述虚拟编组安全控制器1023还用于生成虚拟编组全过程的列 车速度安全防护策略。
[0086]
所述异制列车为即将驶入与自身列控制式相异的线路的列车。
[0087]
所述前车为所述异制列车运行前方最邻近的列车。
[0088]
图3示出了本发明实施例提供的第一个列车控制系统的交互示意图。根据
[0089]
图1场景,列车t_c即将进入制式d线路。如图3所示,列车t_c提前启动所述虚拟 编组通信模块1021,获取前车行车信息,在图3中,所述前车为编组车t_b。
[0090]
所述编组车为已与领车完成虚拟编组的列车。
[0091]
所述领车为能与所在运行线路的地面调度中心取得通信的列车,在图3中,所述领车为 列车t_d。
[0092]
列车t_c的车载既有系统101向调度中心c发送组编请求信息,调度中心c审批后返回 组编同意信息。然后列车t_c利用虚拟编组通信模块1021向编组车t_b发送组编请求,编 组车t_b的虚拟编组通信模块2021接收到该组编请求后,沿虚拟编队运行方向向领车t_d 转发该组编请求。领车t_d的虚拟编组通信模块3021接收到该组编请求后,领车t_d通过 车载既有系统301向调度中心d发送组编请求信息,调度中心d审批后返回组编同意信息。 然后领车t_d通过虚拟编组通信模块3021沿虚拟编队运行反方向向编组车t_b发送组编同 意信息,编组车t_b向列车t_c转发该组编同意信息。列车t_c接收到组编同意信息后, 列车t_c向调度中心c发送组编确认信息。
[0093]
所述虚拟编队为已经虚拟编组在一起的所有列车所形成的列车队列,在图3中,所述虚 拟编队为虚拟编队1。
[0094]
图4为本发明实施例提供的第二个列车控制系统的交互示意图。根据
[0095]
图1场景,当列车t_c将到达执行点1,如图4所示,列车t_c到达执行点1后与调 度中心c通信断开,开始进入虚拟组编阶段。在此阶段,列车t_c利用所述虚拟编组通信模 块1021继续与编组车t_b保持快速、安全和可靠的车车通信,从而实时获取编组车t_b的 行车信息,利用该行车信息,虚拟编组安全控制器1023对虚拟组编过程中列车t_c的速度 和安全以相应的策略进行控制和防护,从而使列车t_c快速、安全地与编组车t_b完成虚拟 组编。
[0096]
所述执行点为线路区段的制式切换点,驶过执行点后,列车被迫失去与自身辖内调度中 心的通信连接。在图4中,所述执行点1为制式c线路和制式d线路的切换点,驶过执行点 1后,列车t_c被迫失去与调度中心c的通信连接。
[0097]
图5为本发明实施例提供的第三个列车控制系统的交互示意图。如图5所示,当列车 t_c达到编组车t_b的速度(在一定误差范围内),且列车t_c与编组车t_b之间的距离达 到虚拟组编理想间隔时,表明列车t_c正式加入虚拟编队1,即开始进入虚拟编队运行阶段, 形成的新编队为虚拟编队2。
[0098]
所述误差范围需满足列车t_c实施常规制动时制动距离误差为亚米级。
[0099]
所述虚拟组编理想间隔为异质列车与其前车形成虚拟编队的边界间隔,由异质列车的动 力学参数、相对制动距离、安全裕度和虚拟编队队内列车距离组成。
[0100]
所述安全裕度是考虑信息传输延迟、机械制动延迟和列车测速定位误差所增设的间隔余 量。
[0101]
在虚拟编队运行阶段,列车t_c利用所述虚拟编组通信模块1021快速、安全、可靠地 获取列车t_b的行车信息,结合该行车信息,列车t_c的虚拟编组安全控制器1023对虚拟 编队运行过程中列车t_c的速度和安全以相应的策略进行控制和防护,使列车t_c平稳安全 地与虚拟编队内前车,即列车t_b,保持安全间隔,从而实现虚拟编队协同运行。
[0102]
所述安全间隔为虚拟编组后编队内每两相邻列车间的安全追踪间隔,由列车自身的相对 制动距离、制动性能及该列车前车的行车信息确定。
[0103]
图6为本发明实施例提供的第四个列车控制系统的交互示意图。根据
[0104]
图1场景,所述虚拟编队2在执行点2处的道岔区段,将进行虚拟解编。如图6所示, 当虚拟编队2接近道岔区段,即图6中的执行点2处,领车t_d通过虚拟编组通信模块3021 向列车t_b发送行车信息,列车t_b的虚拟编组通信模块2021向列车t_c转发该行车信息。
[0105]
根据
[0106]
图1场景,只有列车t_c与领车t_d运行方向不同,故列车t_c为主动解编车,且易 得,在本发明实施例场景下,虚拟编队2中没有被动解编车。
[0107]
所述主动解编车为虚拟编队内与领车运行方向不同,在接近岔区时需要主动离开所在虚 拟编队的列车。
[0108]
所述被动解编车为与领车运行方向相同,但在接近岔区时被迫需要离开所在虚拟编队的 列车。
[0109]
主动解编车t_c的虚拟编组通信模块1021向列车t_b发送解编信息,列车t_b的虚拟 编组通信模块2021将该解编信息转发给领车t_d,领车t_d通过车载既有系统301向调度 中心d发送解编信息,开始进入虚拟解编阶段。
[0110]
所述解编信息包括主动解编车的车次信息、行车信息、解编告知信息
[0111]
在其它的优选实施例中,所述解编信息还包括被动解编车的车次信息、行车信息、解编 告知信息
[0112]
在此阶段,主动解编车t_c利用所述虚拟编组通信模块1021继续与列车t_b保持快速、 安全和可靠的车-车通信,从而实时获取列车t_b的行车信息,利用该行车信息,主动解编车 t_c的虚拟编组安全控制器1023对虚拟解编过程中主动解编车t_c的速度和安全以相应的 策略进行控制和防护,从而使主动解编车t_c快速、安全地与列车t_b完成虚拟解编。当主 动解编车t_c与列车t_b的间隔达到虚拟解编理想间隔,则该虚拟解编完成,领车t_d与 未解编列车t_b构成新的虚拟编队,即虚拟编队3。
[0113]
所述虚拟解编理想间隔为虚拟编队列车解编的边界间隔,取决于解编列车的动力学参数、 绝对制动距离、安全裕度和道岔状态转换时间。
[0114]
所述安全裕度是考虑信息传输延迟、机械制动延迟和列车测速定位误差所增设的间隔余 量。
[0115]
图7为本发明实施例提供的第五个列车控制系统的交互示意图。如图7所示。虚拟编队 3安全驶过岔区后,道岔转换方向,主动解编车t_c继续运行。当主动解编车t_c到达执行 点2后,通过车载既有系统101向调度中心c发送通信请求信息,调度中心c响应,并返回 连接同意信息,此时,主动解编车t_c与其调度中心c的通信连接恢复,同时,主动解编车 t_c的车载虚拟编组通信模块1021关闭,与列车t_b的通信连接断开。
[0116]
在虚拟组编阶段、虚拟编队运行阶段和虚拟解编阶段中,在列车t_b、列车t_c或列车 t_d中的虚拟编组通信模块发生故障,导致列车间通信异常或失效,则所涉及的异质列车 (t_b/t_c)进入远程rm模式。
[0117]
所述远程rm模式为经地面调度中心确认的限制人工驾驶模式。
[0118]
图8示出了本发明另一实施例提供的一个列车控制系统的交互示意图,如图8所示,当 列车t_d即将进入制式a线路时,列车t_d需要利用虚拟编组通信模块3021与列车t_a 进行车-车通信,列车t_d进入执行点4后,列车t_d利用所述虚拟编组安全控制器3023完 成与列车t_a的虚拟组编,从而列车t_d能在制式a线路上按照虚拟编队运行,从而实现 列控系统的兼容。
[0119]
本发明为多制式复合轨道交通网络下的列车控制系统兼容提出了新方法,由于只需要在 多制式列车车载安装车载虚拟编组控制系统,而非安装多种制式的车载设备,故大大降低了 多制式列控系统兼容过程中所需的工程建设成本、设备成本,同时,也大大降低了系统后期 的运营维护成本,进一步有利于打造安全、高效、绿色、智能的轨道交通运输体系。
[0120]
上述对实施例的描述是为了便于该技术领域的普通技术人员能理解和应用本发明。熟悉 本领域的技术人员显然可以较容易的对这些实施例做出各种修改,并把在此说明的一般原理 应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于这里的实施例,本领域 技术人员根据本发明的揭示,不脱离本发明的范畴可做出相应的改进和修改,这都应该在本 发明的保护范围之内。