用于识别行程的替代路线的系统和方法
1.引言
2.本公开涉及用于帮助驾驶员从识别替代行驶路线中受益的装置、系统和方法。
3.本节中的陈述仅提供与本公开相关的背景信息并且可不构成现有技术。
4.驾驶员可选择经由许多不同路线行驶到他们的目的地。驾驶员可频繁地从家行驶到办公地,行驶到杂货店,行驶到孩子的学校,然后返回,以及在这些不同目的地之间行驶。在行驶到这些目的地的过程中,驾驶员可从各种替代路线之中选择。一些路线可包括公路、高速路、地面街道或社区街道等。这些路线中的一些路线可具有优于其他路线的优点:有些可具有最短距离,有些可需要最短行驶时间,有些可避开交通,有些可避开繁忙的十字路口,有些可避开收费站等。驾驶员可面临许多相冲突的选择。
5.许多汽车制造商提供具有驾驶员辅助特征的车辆,这些驾驶员辅助特征包括在车辆偏离其车道时警告驾驶员;向驾驶员警告盲点中的车辆;改变定速巡航控制速度以符合前方汽车的速度;在检测到可能碰撞时自动地刹车等。一些汽车制造商正在开发自动驾驶系统,这些自动驾驶系统将自动地在公路或一些其他街道上驾驶汽车。然而,驾驶员辅助和自动驾驶系统在一些类型的道路上操作起来可好于其他类型的道路。例如,巡航控制在住宅区街道上可能不太有用,在住宅区街道上可能需要频繁停车。因此,驾驶员在决定采取哪条路线到达目的地时可面临许多潜在冲突的选择以节省时间、避开交通、利用自动驾驶系统或满足其他考虑因素。
技术实现要素:
6.所公开的实施方案包括用于识别出发地与目的地之间的替代行驶路线并且识别可通过使用替代路线实现的未来汽车保险费节省的装置、系统和方法。
7.在一个例示性实施方案中,装置包括车辆数据系统。该车辆数据系统被配置为确定车辆从出发地到目的地所采取的行程。该车辆数据系统被配置为识别该车辆从该出发地到该目的地的可用行驶路线。该车辆数据系统被配置为执行该可用路线的比较以确定呈现该车辆经历损失相关事件的降低的可能性的推荐的路线。该车辆数据系统被配置为将该推荐的路线呈现给该车辆的操作者并且从该操作者接收关于该操作者是否接受该推荐的路线的选择。
8.在另一个例示性实施方案中,车辆包括车厢,该车厢被配置为接纳操作者。驱动系统被配置为使车辆开动、加速、减速、停止和转向。操作者控制系统被配置为允许操作者导向车辆的操作。操作者辅助系统被配置为执行至少一个功能,该至少一个功能选自在没有操作者辅助的情况下自主地控制车辆以及辅助操作者控制车辆。车辆数据系统被配置为确定车辆从出发地到目的地所采取的行程。该车辆数据系统被配置为识别该车辆从该出发地到该目的地的可用行驶路线。该车辆数据系统被配置为执行该可用路线的比较以确定呈现该车辆经历损失相关事件的降低的可能性的推荐的路线。车辆导航数据系统被配置为将该推荐的路线呈现给车辆的操作者并且从操作者接收关于操作者是否接受该推荐的路线的选择。
9.在另外一个例示性实施方案中,计算机实现的方法包括确定车辆从出发地到目的地所采取的行程。识别从出发地到目的地的可用行驶路线。执行可用路线的比较以确定呈现损失相关事件的降低的可能性的推荐的路线。将该推荐的路线呈现给操作者并且接收是否采取该推荐的路线的选择。
10.根据本文提供的描述,其他适用特征、优点和领域将变得显而易见。应当理解,本说明书和具体示例仅旨在用于说明的目的并且不旨在限制本公开的范围。
附图说明
11.本文所述的附图仅用于说明目的并且不旨在以任何方式限制本公开的范围。附图中的部件未必按比例绘制,而是将重点放在示出所公开的实施方案的原理上。在附图中:
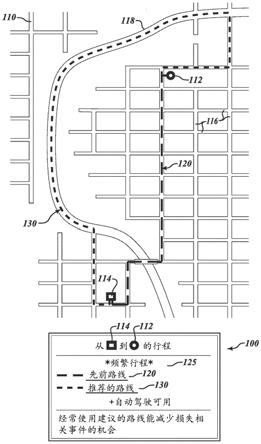
12.图1是地图的示意图,其示出了车辆的操作者所采取的行程上的替代路线以及报告替代路线的屏幕显示;
13.图2是提供附加细节的图1的屏幕显示;
14.图3是具有用于记录行程并用于推荐替代路线的车载系统的车辆的框图;
15.图4是为促进路线和/或替代行程的确定而与远程系统通信的车载计算系统的框图;
16.图5是用于执行一个或多个车载或远程系统的功能的计算系统的框图;
17.图6是图3的系统的框图;
18.图7是可由图3的系统使用的传感器系统的框图;
19.图8是图3的系统可生成和可访问的车辆的行程数据的示意图;
20.图9是每个操作者的图8的行程数据的示意图;
21.图10是可存储在图8和图9的行程数据中的行程记录的示意图;
22.图11是能够访问图3的系统的车辆的车厢的透视图;
23.图12是识别车辆所采取的行程的例示性方法的流程图;
24.图13是评价操作者所采取的行程的操作者评分的例示性方法的流程图;并且
25.图14是推荐路线的例示性方法的流程图。
具体实施方式
26.以下描述本质上仅是例示性的并且不旨在限制本公开、应用或用途。需注意,三位数字参考标号的第一位数字和四位数字参考标号的前两位数字分别对应于元素首次出现时的一位数字图片编号的第一位数字和图片编号的前两位数字。
27.以下描述仅以说明而非限制的方式解释用于帮助操作者从识别替代行驶路线中受益的系统、装置和方法的各种实施方案。
28.参见图1,本公开的各种实施方案包括车辆数据系统100以接收用户从出发点114到预期目的地112的信息。该行程可包括车辆数据系统100没有先前行驶的记录的行程。另选地,如果车辆数据系统100将该路线识别为先前行驶或频繁行驶的路线,则车辆数据系统100可识别安全路线并将其与先前行驶的路线对比。当该行程被识别为先前行驶或频繁行驶的行程125时,车辆数据系统100被配置为推荐前往目的地112的替代路线,与所采取的先前路线或所采取的多个先前路线带来的风险相比,该替代路线呈现损失相关事件的降低的
可能性。无论该行程是否已在先前行驶,车辆数据系统100都可呈现推荐的路线,该推荐的路线呈现车辆相关损失的最低可能性。
29.所呈现的路线可包括地面街道或当地街道116和/或公路或高速路118上的行驶。该推荐的路线可被识别为呈现损失相关事件的更低可能性,因为如图1所示,该推荐的路线的优点(由车辆数据系统100以“+”指示)在于该推荐的路线非常适合自动驾驶模式的使用;在其他情况下,车辆数据系统100可指示存在如下优点:车辆所支持的一个或多个操作者辅助特征在该推荐的路线上可用。可由车辆数据系统100呈现的地图110可表示出发地114、目的地112、先前行驶的路线120和推荐的路线130。车辆数据系统100可以以图形形式和/或文本形式呈现先前路线120和/或推荐的路线130。应当注意,损失相关事件可包括碰撞、可因维护不良的道路路面的状况引起的车辆损坏、因停车位置所致的盗窃或破坏,或者任何会给车辆造成一些损失的事件。
30.参见图2,车辆数据系统100的显示器200向操作者呈现信息以使操作者能够作出关于采取该推荐的路线的明智决定。一旦目的地112已由操作者指定或以其他方式识别并且车辆数据系统100确定行程的出发地114,系统100就可评价所采取的行程。车辆数据系统100可将从出发地114到目的地112的行程识别为先前未行驶过的行程,或车辆数据系统100可将其识别为先前采取或频繁采取的行程125。在后一种情况下,系统100可识别频繁行程125上采取的先前路线120。车辆数据系统100可呈现先前路线120的路线详情222,从而使操作者能够确认车辆数据系统100知道先前路线120。车辆数据系统100还可在遵循先前路线120时提供该行程的行驶时间和/或距离224。行驶时间和/或距离224可呈现先前路线120上的最新行程的实际行驶时间或先前路线120上采取的以往行程的平均行驶时间。
31.在呈现该推荐的路线130的过程中,车辆数据系统100可呈现识别该推荐的路线130的路线详情232。该推荐的路线可包括为前往目的地而要跟随的特定路线和/或最终目的地的微小变化,例如前往停车位置,这可降低因破坏、盗窃或其他因素所致的损失的风险。还可呈现预测的行驶时间和/或距离234以帮助操作者决定要跟随哪条路线。车辆数据系统100可推荐路线,这些路线具有在其他可用路线的实际、平均或预测的行驶时间的方差内的预测的行驶时间。例如,可能不期望呈现行驶时间是另一条可用路线的两倍的推荐的路线。车辆数据系统100可识别最大方差,并且车辆数据系统100可从操作者得出可接受的最大方差。尽管图2中未示出,但是当该推荐的路线130被接受时,如果其尚未被呈现,则系统100可呈现该推荐的路线130的逐向(tum-by-tum)指令。在各种实施方案中,当该系统呈现路线120和130的地图110(图1)时,系统100可呈现识别地图110上的该推荐的路线130的图例236以及表示地图110上的先前路线120的图例226。
32.在各种实施方案中,在呈现该推荐的路线的过程中,系统100可为操作者呈现沿着该推荐的路线130行驶的原因240。原因240可包括可供操作者使用的操作者辅助,诸如自动驾驶。自动驾驶可能在公路或高速路上可用,但在地面街道或住宅区街道上不可用,因为地面街道或住宅区街道上驾驶可出现更断续的走走停停式驾驶。原因240还可识别一个或多个其他辅助特征,诸如可能在公路和高速路上可用的车道偏离警告或车道保持辅助。原因240还可包括选择该推荐的路线130的益处242,诸如因自动驾驶或操作者辅助特征带来的降低的碰撞风险、有助于避免车辆的轮胎或悬架的损坏的更好路面或者其他益处。
33.在各种实施方案中,系统100还可呈现财务效益244。例如,当系统100与车辆的汽
车保险提供商和/或车辆的一个或多个操作者通信时,或在系统100的提供商是汽车保险提供商的情况下,系统100可向操作者确定如果操作者使用或经常使用该推荐的路线130,则可获得潜在汽车保险费节省。通过收集和关联如下进一步描述的数据,汽车保险提供商可量化使用选择的路线130(可能与自动驾驶或操作者辅助特征一起)可如何帮助操作者可能避免事故。因此,汽车保险提供商可帮助确定在避免潜在损失相关事件中节省的费用并且将节省下来的一些费用以减少的汽车保险费或另一种财务效益244的形式进行让利。
34.参见图3,车辆300包括车载系统以识别车辆和/或其操作者所行驶的路线并且识别和推荐与增强的车辆能力相对应的替代路线。车辆300可包括汽车、卡车、运动型多用途车(suv)或用于路上和/或越野行驶的类似车辆。车辆300包括车身310,该车身支撑车厢320以容纳操作者以及任选地一个或多个乘客。车辆300的车身310还容纳多个系统。
35.车辆300包括驱动系统330,该驱动系统与前轮332和后轮334一起开动、加速、减速、停止和转向车辆300。在各种实施方案中,驱动系统330由操作者控制系统340和/或操作者辅助系统360导向。操作者控制系统340与车厢320内的操作者显示与输入系统350一起工作。操作者显示与输入系统350包括所有操作者输入,包括转向控件、油门和刹车控件以及所有其他操作者输入控件。操作者显示与输入系统350还包括向操作者提供信息的数据设备,包括车速表、转速表、燃油表、温度表和其他输出设备。当车辆300配备有操作者辅助系统360时,操作者显示与输入系统350还允许操作者控制操作者辅助系统360并与该操作者辅助系统交互。
36.操作者辅助系统360包括可用自动化、自驾能力或辅助操作者的其他特征,诸如前方碰撞警告系统、自动紧急刹车系统、车道偏离警告系统以及下文参照图6描述的其他特征。因此操作者辅助系统360部分地或完全地控制车辆300的操作和/或向操作者提供帮助操作者避免事故的警告。因此操作者辅助系统360作为操作者控制系统340的替代或与该操作者控制系统一起介入驱动系统330以开动、加速、减速、停止和转向车辆300和/或向车辆300的操作者提供信息和警告。
37.在各种实施方案中,车辆300还包括车辆数据系统380。车辆数据系统380接收和跟踪定位数据,诸如全球定位系统(gps)数据,以提供导航辅助,从而在操作者使用操作者控制系统340控制车辆300时帮助操作者导航。车辆数据系统380还向操作者辅助系统360提供导航数据以允许操作者辅助系统360控制车辆300。车辆数据系统380可操作以接收和存储地图数据并且使用gps或其他定位信息来跟踪车辆300相对于地图数据的位置。另外,车辆数据系统380可记录关于正在采取和已经采取的行程的定位信息。因此车辆数据系统380可确定车辆300已在各种位置诸如出发地114和目的地112(图1和图2)之间行驶的路线。从已行驶的该路线列表中,车辆数据系统380可识别车辆300已行驶的行程。车辆数据系统380可为结合到车辆300中的数据系统,或可包括另一个设备,诸如可搭载在车辆300上的计算设备,诸如平板电脑、智能电话、智能手表或另一个便携式计算设备。在各种实施方案中,不论车辆数据系统380是包括集成到车辆300中的数据系统还是单独和/或便携式设备,车辆数据系统300都能够通过与车辆300上的其他系统的有线或无线通信来与车辆300上的传感器和系统通信。
38.如下文进一步描述,除了车辆数据系统380记录定位数据之外,车辆数据系统380还记录从操作者控制系统340或操作者辅助系统360接收到的其他信息,包括历史数据诸如
速度、快速加速、刹车数据以及能够评价这些先前行程或给这些先前行程打分的其他信息。因此,车辆数据系统380可确定哪些先前行程和/或频繁行程显示出风险标志或不存在风险标志。通过评价来自先前行程的数据,车辆数据系统380可确定与扩展的车辆能力相对应的替代路线是否可用(可能通过使用操作者辅助系统360)。继而,该信息可用于呈现可通过采取不同路线实现的益处242或财务效益244(图2)。
39.应当理解,汽车保险费用是同时按照所驾驶的车辆的特性和操作者的特性来计算的。汽车保险费用可基于车辆的马力、车辆的耐撞性、车辆配备的操作者辅助特征以及其他属性而变化。汽车保险费用还可基于操作者的年龄、经验、驾驶记录和其他特性而变化。因此,为了能够确定益处242或财务效益244,可能适当的是识别谁是车辆300的操作者,将操作者身份信息记录在过去行程的行程数据382中,并且评价什么可为现在和未来行程的替代路线。为此,在各种实施方案中,车辆300还包括与车辆数据系统380通信并识别操作者的操作者识别系统370。如下文进一步描述,操作者识别系统370的各种实施方案可基于操作者的座位移动到特定操作者所使用的位置、通过检测分配给特定操作者的钥匙扣(key fob)、通过识别特定操作者所拥有的蜂窝电话在车厢320中的存在、通过使用成像系统识别操作者、或通过其他设备和方法来识别操作者。
40.除了车载系统之外,各种实施方案还可与远程计算系统通信以执行本文所述的功能。例如,可能期望将行程数据382传送到远程计算系统以便分析关于以往行程的数据或识别频繁采取的行程。远程计算系统可用于评价与那些不同行程相关联的风险并且给该风险打分。远程计算系统还可用于识别自动驾驶或操作者辅助特征可用并可引起行驶期间的事件的更低可能性的路线、替代路线、在使用那些路线的过程中可实现的益处以及可从使用特定推荐的路线中实现的财务效益。
41.参见图4,车辆300的操作环境400可包括远程计算系统450,该远程计算系统被配置为例如与车辆300的车辆数据系统380通信。车辆数据系统380可经由网络410将行程数据382发送到远程计算系统450并且从远程计算系统450接收数据。车辆数据系统380可经由无线通信链路412诸如卫星、蜂窝或wi-fi通信链路来连接到网络410。当停放车辆300时,还有可能车辆300可经由有线网络链路诸如通用串行总线(usb)或以太网连接来耦接到网络400,该有线网络链路可为用于在车辆300是电动或混合动力车辆时对该车辆充电的线束的一部分。远程计算系统450(其可包括服务器或服务器农场)还通过有线和/或无线通信链路414来与网络410通信。远程计算系统450可访问用于通过高速总线460来与数据存储器470一起执行其功能的程序设计和数据。
42.保持在数据存储器470中的信息可包括跨越大区域的行驶数据472,因此可包括涵盖行程数据382中的路线的数据。因此远程计算系统450可使用行驶数据472来评价行程数据382,评价事件诸如先前或频繁使用的路线的碰撞的相对可能性,和/或推荐与扩展的车辆能力相对应的替代路线。在一些其他实施方案中,远程计算系统450可访问行驶数据472并且可经由网络410将相关部分提供给车辆数据系统380以便车辆数据系统380评价以前行程和/或推荐替代路线。类似地,数据存储器470可包括可预期行驶状况数据474,该可预期行驶状况数据也可用于识别替代路线。例如,可预期行驶状况数据474可包括道路类型、道路状况、能见度、天气或交通数据。行驶状况数据474可与各种季节、一周中的天、一天中的时间等相关,这可用于识别替代路线并且识别在任何特定时间从出发地114行驶到目的地
112(图1和图2)的益处242(图2)。行驶状况数据474可为可更新的并且可通过网络410将更新传送到车辆数据系统380。
43.另外,数据存储器470可包括汽车保险费率数据476,该汽车保险费率数据可用于识别潜在财务效益244(图2),诸如在操作者采用推荐的替代路线时可实现的汽车保险费节省。汽车保险费率数据476可包括对于操作者的特定人口统计的精算表、各种区域和路线的历史事故数据以及可用于确定风险可能性的任何其他信息。继而,风险信息可用于确定在操作者采取替代路线时汽车保险承保人可实现的可能节省以及可将节省下来的哪一部分费用作为鼓励让利于操作者。
44.数据存储器470还可包括车辆和/或其操作者的历史行驶数据478。历史行驶数据470可用于识别频繁行程,评价替代路线的可能性,以及替代路线是否可降低事故风险而可使保险提供商和操作者受益。数据存储器470还可包括可用于帮助评价历史行程数据、识别频繁行程、识别替代路线、识别汽车保险费节省或执行相关功能的任何其他数据480。
45.由操作者辅助系统360、车辆数据系统380、如图3所示的其他车载系统或如图4所示的远程计算系统450执行的功能可由执行编程代码的各种计算设备执行,该编程代码被创建以支持那些功能。这些设备可结合本领域技术人员所理解的计算系统的各种实施方式。
46.参见图5,仅以举例而非限制的方式给出,某种形式的计算系统400可用于车辆300(图3)上或远程计算系统450(图4)处的计算系统。在各种实施方案中,计算系统500通常包括至少一个处理单元520和系统存储器530。根据计算设备的确切配置和类型,系统存储器530可为易失性存储器诸如随机存取存储器(“ram”),非易失性存储器诸如只读存储器(“rom”)、闪速存储器等,或易失性存储器与非易失性存储器的某种组合。系统存储器530通常保持操作系统532、一个或多个应用程序534和程序数据536。操作系统532可包括可在台式或便携式设备上执行的任何数量的操作系统,包括但不限于linux、microsoftapple或或专有操作系统。
47.计算系统500还可具有附加特征或功能。例如,计算系统500还可包括附加数据存储设备(可移除和/或不可移除),诸如例如磁盘、光盘、磁带或闪速存储器。此类附加存储器在图5中由可移除存储器540和不可移除存储器550示出。计算机存储介质可包括在用于存储信息诸如计算机可读指令、数据结构、程序模块或其他数据的任何方法或技术中实现的易失性和非易失性、可移除和不可移除介质。系统存储器530、可移除存储器540和不可移除存储器550是计算机存储介质的所有示例。计算机存储介质的可用类型包括但不限于ram、rom、eeprom、闪速存储器(呈可移除和不可移除形式)或其他存储器技术、cd-rom、数字通用光盘(dvd)或其他光学存储器、磁带盒、磁盘存储器或其他磁存储设备,或任何其他可用于存储期望信息并且可由计算系统500访问的介质。任何此类计算机存储介质可为计算系统500的一部分。
48.计算系统500还可具有输入设备560,诸如键盘、鼠标、触针、语音输入设备、触摸屏输入设备等。还可包括输出设备570,诸如显示器、扬声器、打印机、短程收发器诸如蓝牙收发器等。计算系统500还可包括一个或多个通信系统580,该一个或多个通信系统例如在车辆300上的车辆数据系统380(图3)与远程计算系统450通信时允许计算系统500与其他计算系统590通信并且反之亦然。如先前所提及,通信系统580可包括用于有线或无线通信的系
统。可用形式的通信介质通常以经调制的数据信号(诸如载波或其他传输机制)输送计算机可读指令、数据结构、程序模块或其他数据并且包括任何信息传送介质。术语“经调制的数据信号”可包括这样的信号,该信号具有以诸如在该信号中编码信息之类的方式设定或改变的其特性中的一个或多个特性。仅以例示性示例而非限制的方式,通信介质可包括有线介质诸如有线网络或直接布线连接,以及无线介质诸如声介质、射频(rf)介质、红外介质和其他无线介质。如本文所用,术语计算机可读介质包括存储介质和通信介质两者。
49.进一步参照图5,计算系统500可包括全球定位系统(“gps”)电路585,该gps电路可基于至多个gps卫星的相对位置来自动地辨别其位置。如下文进一步描述,gps电路585可用于确定车辆300(图3)的位置并且潜在地识别替代路线。
50.在参照图3至图5描述的环境中,操作者辅助特征对操作者辅助系统360(图3)的可用性可能对于确定其他路线是否可好于其他先前行驶或频繁行驶的路线有着重要意义。例如,当自动驾驶能力、自动刹车或盲点警告可用而得以防止常见类型的公路事故时,沿着公路或高速路行驶可被证明是与扩展的车辆能力相对应的更好路线。这些操作者辅助特征的可用性对于评价沿着不同路线的相对车辆能力可能很重要。
51.参见图6,除了全自动驾驶之外,操作者辅助系统360还可具有任何数量的可用辅助特征,这些辅助特征的可用性可能对沿着特定路线的车辆能力有影响。这些系统的输出不论是指示特定测量值还是仅指示这些系统的激活或非激活,都可记录在行程数据382(图3)中以用于先前行程的评价或评分。操作者辅助系统360可包括前方碰撞警告系统602以向以正常行驶速度行进的操作者提示道路中停止的车辆或其他物体。前方碰撞警告系统602的介入或前方碰撞警告系统602的介入的重复使用可指示操作者疏忽或指示可包括车辆急停形式的危险的路线。类似地,操作者辅助系统360可包括自动紧急刹车系统604。当前方碰撞警告系统602提示操作者应用刹车以避开道路中的停车或其他物体时,自动紧急刹车系统604实际上自动地介入刹车以在道路中检测到停车或其他物体时自行停止车辆300。紧急刹车系统604的介入还可指示操作者疏忽或指示可包括车辆急停形式的危险的路线。
52.操作者辅助系统360还可包括自适应巡航控制系统606。自适应巡航控制系统606自动地调节由操作者或巡航控制系统设定的巡航速度以反映前方的交通速度。例如,如果操作者将自适应巡航控制系统606设定到65英里/小时的标牌规定的公路行驶速度,但由于交通的原因,行驶前方的道路中的车辆的速度在55与65英里/小时之间变化,则自适应巡航控制系统606将反复地调节巡航速度以保持车辆与前方道路中的其他车辆之间的期望距离。尽管自适应巡航控制系统606可能在地面街道或社区街道中不是特别有用,但是其可用性及在公路或高速路上的使用可表示公路或高速路上的行驶代表更好的路线。
53.操作者辅助系统360可包括车道偏离警告系统608,该车道偏离警告系统在车辆接近或跨过车道标志(这呈现明显危险)时提示操作者。如记录在路线的行程数据382中的操作者辅助系统360的激活可指示操作者疏忽或特定路线有危险。操作者辅助系统360可包括车道保持辅助系统610,该车道保持辅助系统使车辆转向以防止车辆接近或跨过车道标志。车道保持辅助系统610的可用性和使用可指示适合使用车道保持辅助系统610的路线表示与扩展的车辆能力相对应的优选行驶路线。
54.操作者辅助系统360可包括盲点检测系统612,该盲点检测系统向操作者提示在该车辆的后围侧板外的盲点中行驶的车辆以警告操作者在此类情况下不要变换车道。操作者
辅助系统360可包括方向盘介入系统614,该方向盘介入系统检测操作者何时已松开方向盘。可将方向盘松开记录到行程数据382中作为操作者疏忽的指示。操作者经常松开方向盘的先前行驶的路线可指示这些路线上的一定程度的分心,这可使得行驶那些路线增加诸如碰撞的事件的可能性。操作者辅助系统360还可包括例如识别停车标志或限速标志的交通标志识别系统616。交通标志识别系统616的可用性可使地面街道或社区街道上的行驶成为优选的,因为该系统将帮助降低因错过标志或行驶速度不当引起的事故的可能性。
55.操作者辅助系统360还可包括后部交通穿行提示系统618以在该车辆正移出某空间时向操作者通知其他车辆驶近。类似地,操作者辅助系统360可包括倒车警告系统620,该倒车警告系统在该车辆驶近该车辆后方的物体时警告操作者。操作者辅助系统360可包括自动远光灯控制系统622以在其他汽车驶近和随后经过时去激活和重新激活远光灯。这种系统的可用性可降低在照明不足或没有照明的公路或地面街道上行驶期间的事件的可能性。操作者辅助系统360还包括手动停车辅助系统624以帮助操作者停放车辆。
56.参见图7,除了操作者辅助系统360中包括的设备之外,车辆数据系统380还可包括多个其他传感器,该多个其他传感器的信息记录在行程数据382(图3)中。来自这些传感器的数据可用于确定先前采取或频繁行驶的路线是否与其他路线相比不太可取。除了gps传感器730之外,车辆数据系统380还可包括加速度计732以检测快速加速或减速,该快速加速或减速可指示因操作者疏忽或危险交通模式所致的过激驾驶或急刹车。车辆数据系统380可包括陀螺仪734以检测指示危险道路、急剧车道变换或急转弯的方向突变。车辆数据系统380可包括至少一个跟车距离传感器736,该至少一个跟车距离传感器确定车辆300跟随其他车辆的距离有多近。跟车距离传感器736可使用任何可确定离另一台车辆的跟车距离的技术,诸如雷达、lidar、使用摄像头或其他光学传感器进行的光学测量、超声测量、激光测量或任何其他可用于确定离另一台车辆的跟车距离的技术。记录特定路线的跟车距离数据可指示那些道路上的交通状况是否呈现危险或操作者是否倾向于在某些路线上过近地跟随其他车辆。
57.车辆数据系统380还可包括设备传感器,诸如监测轮胎是否被充气到推荐的水平的胎压传感器738。车辆数据系统380还可包括其他(miscellaneous)设备传感器740以确定是否在特定路线上一直使用其他系统诸如车灯、喇叭和雨刷。车辆数据系统380还可包括安全带传感器742以指示在特定路线上乘员是否系上了安全带。车辆数据系统380还可包括电话使用传感器744(其可采用电话上执行的应用程序的形式)以报告操作者是否在特定路线上操控或操作操作者的电话。最后,车辆数据系统380可包括安全气囊弹出传感器746或碰撞传感器748以报告灾难性事件,该灾难性事件引起有必要弹出安全气囊的碰撞和/或严重碰撞。
58.从这些传感器进行的数据收集连同从操作者辅助系统360(图6)收集的数据一起可用于执行特定路线上的操作者表现的全面分析以评价沿着各种路线的操作者的评分。
59.表(1)呈现了可由如参照图6和图7描述的操作者辅助系统360和/或车辆数据系统380呈现的数据列表。表(1)包括可被记录的数据字段以及例如对数据进行采样和/或存储的频率。
60.表(1)
[0061][0062]
[0063][0064]
表(1)中列出的一些或所有信息连同其他信息一起可用于评价行程数据382以确定在跟随先前路线时操作者的评分。因此可对行程数据382进行评分以便为由所公开的实施方案识别的替代路线是否可引起降低的碰撞可能性和车辆操作者辅助能力的使用的增加确定依据。
[0065]
参见图8,行程数据382可包括车辆所采取的所有行程的行程记录,包括行程1的行程记录810、行程2的行程记录820、行程3的行程记录830、行程4的行程记录840直至行程n的行程记录890。参见图9,可为车辆的每个所识别的操作者存储单独行程数据,包括操作者1的行程数据982、操作者2的行程数据984直至操作者n的行程数据986。应当理解,如果行程数据存储在如图8中的单组行程数据382中,则行程数据可包括识别每个行程的操作者的记录,如图10所示。
[0066]
参见图10,行程1的行程记录810可包括存储对于评价特定行程的评分而言可能期望的信息的许多字段。行程1记录810可包括识别操作者1012、行程的出发地1014、出发时间1016、目的地1018和到达时间1020的字段。行程1记录810可包括路线信息1022,该路线信息可包括一系列gps位置以识别在出发地1014与目的地1018之间采取的完整路线。
[0067]
基于行程1记录810中存储的信息,分配评分1030。如先前所描述,可由车辆数据系统380或在远程计算系统450(图4)处执行该评分。可根据许多不同元素或数据或者刹车1032、加速1034、转弯1036(可从陀螺仪或加速度计数据辨别出其过于激烈的操纵,如参照图7所描述)、超速1038、驾驶时的电话使用1040以及任何其他标志(例如,其可从参照图6和图7所描述的系统和传感器收集)来将总评分制成表。另外,在各种实施方案中,总评分1030可考虑自动驾驶特征或其他操作者辅助特征使用的程度,如存储在操作者辅助使用记录1050中。由于此类特征可降低事件的可能性,因此在评价先前行程的评分的过程中可考虑操作者辅助特征的使用。然后将使用分配给行程1记录810的总评分1030来确定与沿着出发地与目的地之间的其他路线的行程相比沿着该路线的行程或频繁行程是否更可取、优选或对应于扩展的车辆能力。
[0068]
参见图11,在各种实施方案中,车辆的车厢320(图3)包括操作者显示与输入系统350(图3)以及用于识别操作者并且允许操作者选择由车辆数据系统380(图3)呈现的路线和操作者辅助系统360的操作的多个设备。众所周知,车厢320包括挡风玻璃1110和操作者的座椅1120以及方向盘1126和其他控件诸如油门、刹车踏板及操作前照灯、雨刷等的开关(未示出)。
[0069]
为了识别操作者,车厢320可包括操作者识别系统370(图3),该操作者识别系统包括多个识别设备中的一些或所有识别设备。摄像头或其他成像设备1130被定位成使可使用图像识别进行识别的操作者成像。还可通过操作者将操作者的座椅1120调节到特定操作者偏好的调节位置1122来识别操作者。该位置可通过选择可分配给多个操作者中的每个操作
者的多个记忆按钮(未示出)之一来设定。另外,车厢320可包括钥匙扣识别器1142,该钥匙扣识别器不仅识别钥匙扣1144被授权操作车辆,而且识别钥匙扣1144何时为分配给特定操作者的钥匙扣。钥匙扣1144可例如包括个性化射频识别(rfid)标签,并且钥匙扣识别器1142可包括rfid读取器。另外,车厢320可包括电话连接系统1152,该电话连接系统除了使智能电话1154能够与车辆的娱乐系统或其他系统交互之外,还识别智能电话1154是否与车辆的特定操作者相关联。
[0070]
车厢320还包括显示器200(图2),该显示器提供关于推荐的路线的信息,如先前所描述。显示器200可为触摸屏,其使操作者能够仅仅通过触摸显示器200来选择根据推荐的路线导航到目的地。另外,如果推荐的路线涉及自动驾驶或操作者辅助特征的使用,则操作者可介入那些特征,具体方式是通过触摸显示器200来选择推荐的路线。在一些其他实施方案中,车厢320可包括接受推荐的路线的其他控件诸如1170和1171,以及介入或切断自动驾驶或操作者辅助特征的其他控件诸如1172和1173。控件1170-1173可位于仪表板1190上,位于方向盘1126上,或位于车厢320中的另一个表面上。应当理解,控件1170-1173可仅是介入自动驾驶或操作者辅助特征时可用或所需的控件子组,或这些特征中的一些或所有特征可经由触摸屏显示器200来控制。如参照图2描述的操作者辅助特征240、推荐的路线的益处242、使用推荐的路线的财务效益244以及其他信息也可由显示器200呈现。
[0071]
参见图12,在各种实施方案中,提供了识别频繁行程的例示性方法1200。如先前所描述,频繁行程的识别可用作通过分析最常行驶并因此可呈现潜在损失风险的最频繁暴露的那些路线来推荐替代路线的依据。方法1200从框1205开始。在框1210处,审阅行程数据以识别车辆和/或操作者最常行驶到的目的地。应当理解,频繁行程可呈现可能损失相关事件的最大实例数,并且因此可能期望分析这些路线以找出呈现降低的损失风险的替代路线。在框1220处,对于最频繁目的地而言,识别行程的出发地到所识别的目的地以首先对频繁行程进行排序。在框1230处,其次根据频繁行程的行程长度对最频繁行程进行排序。应当理解,最长行程长度的频繁行程可呈现可能事件的最大暴露,因此可在这些频繁行程之中优先考虑最长行程以便通过分析来找出替代路线。可根据行驶距离和/或行驶时间来确定行程长度。方法1200在框1235处结束。
[0072]
参见图13,在各种实施方案中,提供了评价行程数据中的以往行程的例示性方法1300。如先前所描述,可由操作者辅助系统360和/或车辆数据系统380呈现多个数据元素(图2)以确定那些行程所呈现的事件风险的可能性。在一个特定实施方案中,除了评价所提供的数据元素之外,还可使用操作者采用操作者辅助特征的程度来评价与先前行程相关联的风险的可能性。方法1300从框1305开始。在框1310处,审阅行程数据以确定在行程的哪一部分使用了操作者辅助特征以及使用了哪些操作者辅助特征。操作者辅助特征的使用或不使用可归因于所驾驶的路线。然而,即使当操作者辅助特征的使用可降低事件的可能性时,也可因操作者偏好而不使用操作者辅助特征。在框1320处,评价由操作者辅助特征和/或车辆数据系统报告的数据(诸如列于表(1)中)以确定与先前行程相关联的风险的可能性。在框1330处,确定总评分并且将该总评分分配给先前行程。该总评分或特定路线的此类评分的平均值可用于提供推荐的路线是否可呈现更好的替代选项的比较依据和/或确定潜在保险费节省。方法1300在1335处结束。
[0073]
参见图14,在各种实施方案中,提供了用于推荐替代路线的例示性方法1400。方法
1400从框1405开始。在框1410处,此时确定车辆正采取从出发地到目的地的行程,如参照图1和图2所描述。在框1420处,识别从出发地到目的地的可用行驶路线,如先前参照图4所描述。在框1430处,执行可用路线的比较以确定推荐的路线,该推荐的路线呈现车辆经历碰撞的最低可能性。在框1440处,将推荐的路线呈现给操作者并且从操作者接收关于是否采取推荐的路线的选择。方法1400在框1445处结束。
[0074]
应当理解,上面阐述的详细描述本质上仅仅是例示性的,并且不脱离所要求保护的主题的主旨和/或精神的变型旨在落入权利要求的范围内。此类变型不应视为脱离所要求保护的主题的精神和范围。