1.本发明涉及机器人技术开发与应用领域,特别是一种用于火电厂锅炉水冷壁行走作业的爬壁机器人。
背景技术:
2.火电厂锅炉的水冷壁由大量并排的钢管和鳍片交替焊接构成,传导锅炉内燃烧产生的热来产生蒸汽或热水。受炉内高温氧化和煤渣冲刷的持续作用,钢管面向炉膛内部的外表容易出现凹坑、裂纹与破损等缺陷,钢管局部强度的降低可能产生爆管泄漏的安全问题。定期检测水冷壁钢管的状况,对于排除安全隐患、减少经济损失至关重要。
3.针对水冷壁的检测可采用人工和装置作业两种途径,前者需要搭建满炉膛的脚手架,耗时耗力且存在极大人身安全隐患,后者需要装置具有极强的环境适应能力。针对后者,爬壁机器人因可以配备灵活的壁面行走能力,是以装置代替人力开展水冷壁检测的时代选择。
4.管形壁面的工作环境十分恶劣,爬壁机器人开展有效行走需要极为可靠的结构与控制方法支撑。结构方面既需要适应复杂变化的壁面情况,也需要提供足够的吸附力;控制方面既需要提供足够定位精度,也需要保障期望路线的有效跟踪。
5.目前,爬壁机器人主要根据吸附和行走方式进行区分。竖直壁面上的吸附方式主要有负压吸附、磁力吸附、推力吸附和粘着剂吸附等。磁力吸附式只适用于导磁性材料构成的壁面,在保证吸附距离的前提下,能产生远超其它吸附方式的吸附力,且受到壁面缺陷的影响较低。磁吸附式爬壁机器人依磁力来源可分为电磁式和永磁式两种。电磁式爬壁机器人吸力可调节,但是突然断电或电力不足将造成磁吸附力减小,进而可能引发机器人坠落事故;永磁式爬壁机器人的吸附力不受断电影响,但吸附力大小受吸附距离影响且距离不易主动调节。
6.目前,面向水冷壁的爬壁机器人,吸附方式主要采取永磁式。永磁铁可放置于轮式机器人的轮毂中,既可保证吸附距离,也可节省空间,但永磁铁的利用率较低;永磁铁也可悬于车架下方以提高利用率,但与壁面的距离保持存在困难;另外,可采用履带式行走机构,将永磁铁镶嵌在履带上,然而履带行走机构本身的转向难题加上复杂管壁条件,使得该种方式应用十分困难。
技术实现要素:
7.有鉴于此,本发明针对现有水冷壁管外缺陷检测途径存在劳动强度高、作业效率低和安全隐患大等问题,及现有爬壁机器人重量过大、运动迟钝、适应性差、扩展性低、成本高昂等缺点,提出一种高适应性爬壁机器人设计。
8.为实现上述目的,本发明的技术方案如下:一种用于火电厂锅炉水冷壁行走作业的爬壁机器人,包括爬壁机器人双臂悬架系统、平行四边形越障吸附系统、壁面障碍自适应梯形转向系统、前端灰渣清扫系统以及基于磁场训练的梯形转向角量测分析技术。所述爬
壁机器人双臂悬架系统包括脊柱式主梁、主梁纵平面内的框形车架、前轮毂电机转向器、后轮毂电机固定器、悬架双横臂以及减振装置。所述平行四边形越障吸附系统包括铰接于转向器与固定器的平行四边形越障摇臂、作为平行四边形底边的磁钢箱、配置于磁钢箱内部的halbach永磁体组合以及装配在转向器与固定器纵臂上的弹簧复位装置。所述壁面障碍自适应的梯形转向系统包括与转向器固连的梯形斜边件及具有壁面障碍自适应的梯形短连杆。所述前端灰渣清扫系统包括平行于壁面的盘式对旋清扫刷、同步驱动子系统和钝角灰渣分离机构。所述基于磁场训练的梯形转向角量测分析技术包括固连于车架上的磁敏元件、深度神经网络模型、数据融合滤波器。基于以上设计,本发明的爬壁机器人可显著提高壁面吸附稳定性、复杂壁面适应性、运动及越障能力,可实施高效的水冷壁行走作业。
9.进一步,所述爬壁机器人的车架为与机器人纵平面重合的脊柱式铝型材主梁和框形车架,铝型材质既可保持车架整体强度也能减轻爬壁机器人车架重量;因铝型材具有很强的耐腐蚀性,适合锅炉水冷壁等复杂环境;铝型材不具有导磁性,不会出现受永磁铁的影响而产生干扰电控系统运行的磁力。在需要的情况下,车架材质可更换为其它不导磁的轻型材料。纵平面内的车架将常规立方体式车架压缩到了纵平面内,有效缩减了机器人的横向宽度,保障机器人的通过性。
10.进一步,所述悬架系统与高性能汽车的悬架系统类似,采用双臂减振越障设计,包括上、下平行横臂以及铰接于车架和下横臂的弹簧减振器。悬架对车辆的平稳性和操纵性有重要的影响,悬架种类繁多,其中双臂式独立悬架的结构复杂程度适中,运动性能和操控性非常出色。本发明考虑爬壁机器人的整体负载情况,在经典双叉臂减振机构的基础上进行改进,将传统的a 字臂结构设计为扁状一字横臂,在保留双臂结构稳定性的基础上,减小了横臂的尺寸,为平行四边形越障吸附系统留出空间;扁状一字设计使机器人在竖直壁面运动时横臂可提供更大的抗扭能力;因后轮吸附系统不需要额外的转向空间,若有需要,后轮的两组横臂可改为a形叉臂。
11.进一步,所述弹簧减振器由减振上铰接连杆、减振柱形筒、减振弹簧和减振下铰接端头组成,提供单自由度越障运动需求;上铰接连杆于柱形筒内的部位直径较大,受柱形筒上开口较小直径的约束,不会因受拉力过大而脱离;所述下铰接端头通过螺栓与减振柱形筒连接,以便及时更换减振弹簧。除弹簧外,减振器选用不锈钢材质。机器人在竖直壁面运行时,减振器不承担车架重量,仅当轮子越障时弹簧才发生压缩,压缩量正比于越障高度,越障后由该弹簧提供轮子的复位推力。由于弹簧压缩所产生的力相较于磁吸附力小得多,在弹簧压缩过程中,减振器上铰接连杆对车架推力所产生的扭矩远小于其余轮子旁吸附系统所产生的扭矩,使得机器人在越障过程中仅相应的轮子被抬高,而车架与其余轮子并未受到影响。
12.进一步,所述前轮转向器和后轮固定器由不锈钢加工而成,用于连接轮毂电机和双臂减振越障机构;所述前轮毂电机转向器和后轮毂电机固定器分别包含支撑前轮组双横臂的球铰件与支撑后轮组双横臂的铰链件;转向器和固定器中上部位各有两根背离外伸的纵臂,用于固定吸附系统的弹簧复位装置,纵臂末端铰接吸附系统的摇臂。转向器中部固连一根短斜臂,为梯形转向机构提供斜边支撑。固定器连接的轮子比转向器连接的轮子大,其连轴开孔相对较高。
13.进一步,所述轮子采用轮毂电机的形式,电机放置于轮内,密封性好,避免水冷壁
灰渣对电机和减速器等产生不利影响;可节省底盘空间,为减振越障和吸附提供足够空间。前、后轮采用不同型号的轮毂电机,前轮直径较后轮小,重量轻,主要提供转向驱动力;后轮扭矩大,主要为壁面大负载提供驱动力。若能提供相同直径、重量轻且扭矩足够的前、后轮,仅需要调整前轮转向器与后轮固定器上连轴孔的高低。为保障壁面行走的平稳性,轮子胎面宽度不小于壁面钢管中心距,该要求可通过为各轮增加副轮的方式实现。
14.进一步,所述平行四边形越障摇臂由四块不锈钢片分前后两组构成,摇臂上端抵靠在弹簧复位装置上,下端与磁钢箱铰接。前、后摇臂的中上端处与转向器/固定器的纵臂两端铰接;前轮转向器与后轮固定器上安装的摇臂长度受前、后轮的轮径影响,两者中上端处铰接点占摇臂分段的比例相同,保障前、后轮在磁钢越障时对弹簧提供相同的压力。当机器人处于竖直壁面时,平行四边形越障吸附系统磁钢箱是平行四边形的活动边,为保障磁钢与壁面恒定的吸附距离,由弹簧复位装置通过摇臂提供平衡磁钢重量的推力;当磁钢遇到障碍物时,因属平行四边形活动边而被斜向抬高以越过障碍物,在此过程中复位装置内的弹簧被进一步压缩,当越过障碍物后,弹簧的推力促使磁钢返回最佳吸附位置。因弹簧复位装置的双向布置,可保证复位过程中磁钢运动不过量,直接到达并保持在最佳位置。
15.进一步,所述磁钢箱由不锈钢板折叠焊接而成,顶面、底面与短边端面为矩形,长边端面为倒置梯形;磁钢箱沿爬壁机器人行走方向的前后两个面,即短边端面,为斜面,减小了机器人遇到障碍物时的阻力,增加越障平滑性,磁钢箱一端斜面用螺栓连接,方便更换磁钢。磁钢箱内永磁铁采用halbach 布置,在提供优化吸附力的同时,也方便制作、安装与更换;永磁铁可全部或部分被更换为电磁吸附装置,提供更为灵活的吸附力。
16.进一步,所述弹簧复位装置固连于纵臂上,每组吸附装置的两条纵臂上各安装一个,由预紧复位弹簧和不锈钢外壳组成;弹簧的一端通过不锈钢片抵住平行四边形摇臂上端,因不锈钢外壳限位不会超出不锈钢外壳的设定位置,提供竖直壁面上平衡磁钢箱重量的推力,保障机器人爬壁时磁钢箱与壁面的距离及磁钢箱避障后提供足够磁钢箱返回最佳吸附位置的推力;弹簧另一端通过不锈钢片紧靠预紧螺栓,可从不锈钢壳外部拧动螺栓来调节弹簧预紧力。
17.进一步,所述不锈钢外壳由不锈钢折叠焊接的单侧面开口箱体和侧面盖板组成,两者均通过螺栓固连到转向器/固定器的纵臂上,侧面盖板与箱体构成可拆装的闭合空间,便于检测与更换弹簧;预紧螺栓一侧的端面上固连一颗与螺栓配合的螺母,相对的另一端面及与其相连的底面预留适当长度和宽度的缝隙,便于磁钢箱避障前后摇臂通过。
18.进一步,所述前轮转向结构提供满足前、后轮阿克曼约束的梯形配置;梯形短边处于前轮后部,由双弧形y字滑槽杆与短杆铰接构成,配合双臂减振越障机构,在竖直壁面上提供与越障轮同步的短连杆起伏运动,即当转向轮被障碍物抬高时,梯形短边可自适应调节长度和与抬高轮铰接短边的高度,在避免对另一转向轮造成不利影响同时,仍可通过另一截短边传递梯形转向力。
19.进一步,所述盘式对旋清扫刷与同步驱动子系统,由直流电机带动对旋啮合齿轮和同轴同步带轮,经同步带驱使清扫刷旋转,对旋清扫刷末端存在少量重叠,保证对管壁的清扫效果;处于清扫刷后部的钝角灰渣分离机构,包括两侧紧贴清扫刷的灰渣剥离杆和其后的钝角挡泥板,剥离杆可剥离刷子上的灰渣,当机器人向上行驶时可使灰渣沿钝角挡泥板的斜面滑动到机器人左右两侧并掉落,避免减小机器人轮面与管壁的摩擦系数。
20.进一步,所述基于磁场训练的梯形转向角量测分析技术以左右两侧转向轮的永磁吸附磁钢组为磁力来源,以固定在机器人车架上的磁敏元件为反馈元件,测量多转向角下的磁力数据,建立基于磁力输入、转向角输出的深度神经网络模型,为机器人运动控制提供基于磁分析的量测转向角。在左右转向器上固连姿态传感器,实时获取左右轮的转向情况;结合前两种信息和左右轮差速下梯形的变形关系,建立数据融合滤波器,将磁分析获得的转向角、姿态传感器转向角、差速变形关系加权融合,获得更准确的前轮转向情况。
21.本发明的有益效果为:
22.(1)本发明的爬壁机器人车架采用铝型材,其余结构件采用不锈钢,两种金属均具有很强的耐腐蚀性能,适合复杂的炉内作业环境;两种材料均无导磁性,不产生剩磁,不会对磁敏电子元件产生影响;脊柱式主梁和框形车架可有效缩减车架宽度,增强机器人的通过性。
23.(2)本发明的爬壁机器人悬架系统采用双臂式减振越障结构,在扁状一字横臂支撑下,爬壁机器人车架重量由悬架的侧面传递到轮子,该结构在垂直于壁面方向仅有越障时减振弹簧产生的推力。在越障过程中,减振弹簧产生的推力在车架上产生的扭矩远小于其余吸附系统产生的扭矩,对车体平稳性不产生影响,有利于连续稳定的壁面行走;因越障能力只受减振弹簧的影响,该结构在壁面上可越过更高障碍物。由于轮子与磁钢箱并列放置,磁吸附力将始终产生让轮子倾覆的扭矩,左右轮子采用对称的双臂式平行四边形减振越障设计,可有效抵消倾覆扭矩,使轮子和磁钢箱相对于壁面的姿态得以保持。
24.(3)本发明的轮子选用了一体化轮毂电机的形式,将电机、减速器和编码器封装在密闭的轮毂内,为底盘腾出空间且可有效阻止灰渣进入。轮子胎面宽度不小于钢管中心距,在机器人竖直或斜向运行时,轮子得以始终处于管壁表面,保证磁吸附间距,有利于机器人稳定运行。
25.(4)本发明的吸附装置由平行四边形机构支撑,采用的四块不锈钢片构成的摇臂保证磁钢箱不会侧向倾覆,而平行四边形设计及磁钢箱两端面的斜面布置,使得磁钢箱具有独立于双臂减振越障机构的额外越障能力,在磁钢遭遇障碍物时不至于将轮子一并抬高而造成机器人运动失稳。
26.(5)本发明的弹簧复位装置提供不小于磁钢箱稳定于最佳吸附位置所需要的弹力,因在最小弹力位置对弹簧进行限位,可保障机器人在壁面上行或者下行时,磁钢箱均处于最佳吸附位置。当磁钢箱越障被抬高时,弹簧在平行四边形摇臂的作用下产生额外的压缩量,越障过后,该弹簧压缩量将驱使磁钢箱回到并保持在最佳吸附位置,避免越障后磁钢箱在重力作用下不能复位,进而提供给定安全系数的磁吸附力。弹簧复位装置安装在转向器与固定器的纵臂上,通过拧动复位装置端部螺栓可直接调节弹簧预紧力,还可拆下侧面板来检测或更换复位弹簧。
27.(6)本发明的梯形转向结构采用了双弧形y字滑槽铰接短连杆,可保证梯形短边转向力的传递;若因越障而使一侧转向轮被抬高,短连杆将产生适应性的长度变化,同时仅被抬高转向轮一侧的短杆产生高度变化,从而保证了期望的梯形转向关系。
28.(7)本发明的盘式对旋清扫机构,对灰渣的清扫过程为清扫刷垂直于壁面的持续圆周运动,借此可有效剥离管壁的灰渣。设置的灰渣剥离杆,在清扫刷旋转过程中持续剥离刷上附着的灰渣,使其沿壁面掉落;紧邻的钝角挡泥板可阻挡掉落的灰渣,当机器人向上运
动时可使灰渣沿三角形斜边滑动到机器人两侧,避免了灰渣对轮子摩擦力的影响,同时为监测作业提供了更清晰的壁面环境。
29.(8)本发明的梯形转向角量测分析技术可提供转向轮左右磁钢箱的准确角度关系,结合姿态传感信息和左右轮差速转向下梯形的变形关系,经滤波后可获得更精确的梯形转向角,更有利于提升机器人运动的稳定性和轨迹跟踪的精确性。
附图说明
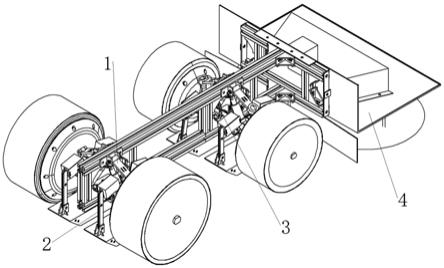
30.图1为本发明的总体结构的轴测图;
31.图2为本发明的总体结构的俯视图;
32.图3为本发明的总体结构的主视图;
33.图4为本发明的前轮毂电机转向器的轴测图;
34.图5为本发明的后轮毂电机固定器的轴测图;
35.图6为本发明的弹簧减振器的剖视图;
36.图7为本发明的双臂减振越障机构越障时的主视图;
37.图8为本发明的平行四边形越障吸附机构的轴测图;
38.图9为本发明的平行四边形越障吸附机构磁钢箱的剖视图;
39.图10为本发明的弹簧复位装置外壳和侧板的轴测图;
40.图11为本发明的平行四边形越障吸附机构越障时的正视图;
41.图12为本发明的平行四边形越障吸附机构复位装置正常状态的剖视图;
42.图13为本发明的平行四边形越障吸附机构复位装置工作状态的剖视图;
43.图14为本发明的梯形转向系统的轴测图;
44.图15为本发明的梯形短连杆的轴测图;
45.图16为本发明的前端灰渣清扫系统的轴测图;
46.图17为本发明的同步驱动子系统内部结构的轴测图。
具体实施方式
47.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
48.如图1所示,本实施例的用于锅炉水冷壁作业的爬壁机器人包括爬壁机器人双臂悬架系统1、平行四边形越障吸附系统2、壁面障碍自适应的梯形转向系统3、前端灰渣清扫系统4。
49.如图2、3所示,所述爬壁机器人双臂悬架系统1包括脊柱式主梁11、主梁纵平面内的框形车架12、分布于主梁两侧的固定装置13、前轮毂电机转向器14、后轮毂电机固定器15、前悬架双横臂16、后悬架双横臂17以及减振装置18。
50.如图4-6所示,所述前轮毂电机转向器14与后轮毂电机固定器15均为焊接的一体式结构件,各自包含纵臂141和151;所述前悬架双横臂16包括上横臂161与下横臂162;后悬架双横臂17包含上横臂171与下横臂172;所述减振装置18包括减振上铰接连杆181、减振柱形筒182、减振弹簧183 和减振下铰接端头184。双臂独立悬架的结构复杂程度适中,运动性能和操控性出色。本发明在经典双叉臂减振机构的基础上进行改进,将a字臂结构改为扁状
一字的样式设计成上横臂161与171、下横臂162与172;后轮因不需要提供额外转向空间,上横臂171与下横臂172均可更改为经典的a字臂。
51.本实施例中,所述减振装置18的减振柱形筒182与减振上铰接连杆181 配合的地方设计有限位结构,如图6所示。这是因为在壁面的行走环境下,减振上铰接连杆181和与其相连的固定装置13、脊柱式主梁11和主梁纵平面内的框形车架12并不会在重力的作用下平衡弹簧的回复力,容易被压缩的弹簧顶起一定高度;在限位结构作用下,爬壁机器人的整体高度得到限制。减振下铰接端头184通过螺栓与减振柱形筒182连接;螺栓连接时,应加上弧面垫圈,贴合柱形表面的同时增大接触面积,有效防止螺栓松动。减振下铰接端头184可方便拆下,以检测或更换减振弹簧183,降低爬壁机器人的维修难度。
52.如图7所示为本实施例的轮胎越障效果。当爬壁机器人在壁面行走遇到障碍物时,因平行四边形关系,双臂悬架系统1在悬架双横臂16或17及减振装置18的作用下,遇到障碍物的轮子会被顶起以完成越障。整个爬壁机器人双臂悬架系统1的其它轮子与吸附部分不会因为单个轮子被顶起而发生形态改变,保障了磁钢与水冷壁面间距及相应的磁吸附力。
53.如图8-12所示,本实施例中所述平行四边形越障吸附系统2由平行四边形越障摇臂21、作为平行四边形底边的磁钢箱22、配置于磁钢箱内部的 halbach永磁体组合23以及装配在转向器与固定器上的弹簧复位装置24。该机构在纵臂141/151的基础上采用平行四边形设计,既可保障磁钢与壁面的最佳距离吸附,也可在吸附机构遇到障碍物时通过平行四边形越障摇臂21 的移动引导磁钢箱22滑过障碍物,其越障效果如图11所示。
54.本实施例中,所述弹簧复位装置24由不锈钢壳241、调节螺栓242、侧板243、复位弹簧244、不锈钢薄片245和246组成。复位弹簧244的一端通过不锈钢薄片245紧靠上述的平行四边形越障摇臂21不锈钢片上端,另一端通过不锈钢薄片246紧靠调节螺栓242,可以从外部拧动螺栓来调节复位弹簧244的预紧程度。不锈钢壳241由不锈钢折叠焊接而成,留出一个侧面方便检测更换复位弹簧244。当调节好弹簧复位装置24后,平行四边形越障摇臂21的不锈钢片应垂直于壁面,如图12所示。当磁钢越障时,平行四边形越障摇臂21会向后方向摆动,抬高磁钢以越障;该阶段纵臂141/151 后端复位弹簧244被压缩,如图13所示;越障完成后,磁钢箱22与壁面距离可能过远,吸附力不足以使其复位,此时复位弹簧244释放弹性势能,推动平行四边形越障摇臂21的不锈钢片让磁钢箱22复位。
55.如图14、15所示,本实施例中所述梯形转向系统3在左右前轮毂电机转向器14的基础上,配置包括固连于前轮毂电机转向器14的球头转向连接件31与32、梯形斜边件33以及具有壁面障碍自适应的梯形短连杆34。梯形转向系统3的整体尺寸与前后轮轴距相匹配,满足阿克曼约束。梯形短连杆34由双弧形y字滑槽杆341与短杆342铰接构成,双弧形y字滑槽杆341 的滑槽弧度满足单侧轮子抬高时的外移尺寸变化约束,可避免另一侧轮子受到非转向因素的拉扯影响。
56.如图16、17所示,本实施例中所述前端灰渣清扫系统4包括盘式对旋清扫刷41、同步驱动子系统42和钝角灰渣分离机构43。在对壁面清扫中盘式对旋清扫刷41可剥离并转运壁面灰渣,钝角灰渣分离机构43的灰渣剥离杆431可剥离刷子末端携带的灰渣,在机器人上行时使灰渣沿着钝角挡泥板432的斜面滑到机器人两侧。
57.以上仅为本发明的优选实施例方式,并不用于限制本发明。需要指出的是,对于本领域的技术人员在不脱离本技术方案的前提下,本发明可以有各种更改和变化;凡在本发
明的精神和原则之内,所作的任何修改、等同替换、改进等,应同样视为落入本权利要求书要求的保护的范围。