1.本发明涉及汽车控制方法技术领域,尤其涉及一种前后双轴转向车辆的循迹控制方法。
背景技术:
2.随着智能网联和自动驾驶技术的长足进步,汽车底盘开始沿线控化、智能化和电动化趋势发展。前后双轴转向车辆具有转弯半径小,转向模式多的优势,在未来会广泛应用于乘用车和特种运输车领域。循迹控制是自动驾驶技术中的一项重要技术,车辆循迹行驶的精度直接关系到无人车的安全性,当前有关车辆循迹控制的方法仅能应用于前轴转向车辆,且计算量较大,成本高。
技术实现要素:
3.本发明所要解决的技术问题是如何提供一种计算量小,精度高,成本低的前后双轴转向车辆的循迹控制方法。
4.为解决上述技术问题,本发明所采取的技术方案是:一种前后双轴转向车辆的循迹控制方法,其特征在于包括如下步骤:
5.简化前后双轴转向车辆为二自由度动力学模型;
6.建立前后双轴转向车辆与目标轨迹间的相对运动关系;
7.基于最优控制理论设计前后双轴转向车辆循迹控制器;
8.使用设计的前后双轴转向车辆循迹控制器,输出车辆前后轴转向角命令。
9.采用上述技术方案所产生的有益效果在于:相比于应用于前轴转向车辆的循迹控制方法,本发明方法针对轮式底盘车辆具有较广泛的应用性,可应用于前后双轴转向车辆,实现蟹行、后轮随动、前轴转向和后轴转向四种转向模式的循迹控制,也可兼容应用于前轴转向车辆的循迹控制。
10.相比于其他以车辆位置与目标轨迹偏差作为控制效果期望的循迹方法,本发明方法融合了车辆横摆角速度和三种车辆位置与目标轨迹间的偏差作为控制效果期望,通过设定期望的车辆质心与轨迹目标点处的侧向偏差,保证车辆循迹时行驶轨迹与目标轨迹的贴合度,通过设定期望的车辆质心与目标轨迹预瞄点处的侧向偏差,避免车辆转向滞后,通过设定期望的横摆角速度既能配合设定的期望航向角偏差,实现循迹时车辆航向角控制,又能避免循迹行驶过程中车身横摆抖动现象,兼顾车身横摆稳定控制,保证乘员乘坐舒适性。
11.相比于基于高自由度模型和复杂控制理论的循迹控制方法,本发明方法可在保证循迹精度的情况下,具有计算量较小的优势,便于向实车控制器部署。
附图说明
12.下面结合附图和具体实施方式对本发明作进一步详细的说明。
13.图1是本发明实施例中二自由度前后双轴转向车辆动力学模型图;
14.图2是本发明实施例中车辆与目标轨迹间的相对运动关系图;
15.图3a是本发明实施例中前后双轴转向车辆的蟹行转向模式图;
16.图3b是本发明实施例中前后双轴转向车辆的后轮随动转向模式图;
17.图3c是本发明实施例中前后双轴转向车辆的前轮转向模式图;
18.图3d是本发明实施例中前后双轴转向车辆的后轮转向模式图;
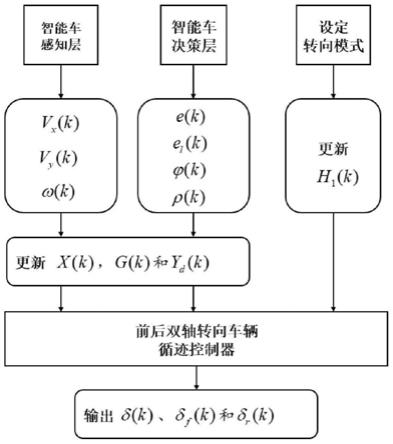
19.图4是本发明实施例所述方法的控制流程图;
具体实施方式
20.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
22.如图4所示,本发明实施例公开了一种前后双轴转向车辆的循迹控制方法,所述方法包括如下步骤:
23.步骤1:简化前后双轴转向车辆为二自由度动力学模型。
24.假定车辆的左右前轮、左右后轮转向角相同,且车辆的前后轴转向角、轮胎侧偏角和质心侧偏角都很小,忽略车辆的俯仰、横摆运动和载荷转移,将前后双轴转向车辆简化为二自由度动力学模型。以汽车质心o为坐标原点,汽车纵向运动方向为x轴,车辆侧向运动方向为y轴,垂直地面方向为z轴建立坐标系。
25.对车辆受力分析,可得:
[0026][0027]
式中∑fy为沿y轴方向合力,∑mz为绕z轴的合力矩,f
yf
、f
yr
分别为前、后轮胎的侧向合力,lf、lr分别为前、后轴与车辆质心间距离,δf、δr分别为前轮、后轮转角。
[0028]
设沿x、y方向车辆质心处的加速度为a
x
、ay,可得:
[0029][0030]
式中,v
x
为车辆纵向车速,为车辆纵向车速变化率,vy为车辆横向滑移速度,为车辆横向滑移速度变化率,ω为横摆角速度。
[0031]
前轮、后轮转角δf、δr一般比较小,故取cosδf=1,cosδr=1由牛顿第二定律可得:
[0032][0033]
式中,iz为车辆绕z轴的转动惯量,为车辆绕z轴旋转的角加速度。
[0034]
轮胎侧向力fy与轮胎侧偏角α的关系为:
[0035]fy
=-cα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0036]
前轮侧偏角αf可表示为:
[0037][0038]
后轮侧偏角αr可表示为:
[0039][0040]
车辆二自由度动力学模型的方程为:
[0041][0042]
将上式整理为标准的状态空间方程:
[0043][0044]
步骤2:建立前后双轴转向车辆与目标轨迹间的相对运动关系。
[0045]dl
为前后双轴转向车辆循迹时设定的预瞄距离,e为车辆质心与期望轨迹目标点处的侧向偏差,e
l
为车辆质心与期望轨迹预瞄点处的侧向偏差,为车辆横向中心线与期望轨迹目标点处切线的航向角偏差,则车辆横向中心线与期望轨迹目标点处切线的航向角偏差的微分方程为:
[0046][0047]
式中ρ为期望轨迹目标点处道路的曲率。
[0048]
考虑车辆侧滑时,车辆侧向偏差微分方程为:
[0049][0050][0051]
航向角偏差一般比较小,取则车辆位置与目标点的侧向偏差、航向角偏差与车辆运动参数之间的理论计算公式:
[0052][0053]
步骤3:基于最优控制理论设计前后双轴转向车辆循迹控制器。
[0054]
1)建立前后双轴转向车辆循迹控制系统模型。
[0055]
综合前后双轴转向车辆二自由度动力学模型和车辆与目标轨迹间的相对运动关
系,控制系统状态空间方程为:
[0056][0057]
式中,x为系统状态向量,u为系统控制向量,u=[δ
f δr]
t
,y为系统输出,w为系统噪声,w=[0 0 0 0 ρv
x
]
t
。
[0058][0059][0060]
忽略系统噪声w,设定控制器采样周期为t,x(k)、x(k+1)分别为tk时刻系统状态,y(k)、u(k)为tk时刻系统输出和控制量,令v
x
(k)、vy(k)、ω(k)、e(k)、e
l
(k)、分别为tk时刻车辆的纵向速度、侧向滑移速度、横摆角速度、车辆质心与期望轨迹目标点处的侧向偏差、车辆质心与期望轨迹预瞄点处的侧向偏差、车辆横向中心线与期望轨迹目标点处切线的航向角偏差,将控制系统离散化:
[0061][0062]
式中
[0063]
2)设定tk时刻前后双轴转向车辆循迹控制系统模型的系统控制期望为yd(k),其中ωd(k)、ed(k)、e
ld
(k)、为tk时刻期望的横摆角速度设定值、期望的车辆质心与轨迹目标点处的侧向偏差设定值、期望的车辆质心与轨迹预瞄点处的侧向偏差设定值、期望的车辆横向中心线与期望轨迹目标点处切线的航向角偏差设定值,满足:
[0064][0065]
式中ρ(k)为tk时刻期望轨迹目标点处道路的曲率。
[0066]
3)设定控制系统二次型性能指标为j,式中q,r为正定的权值矩阵。
[0067]
步骤4:使用步骤3所设计的前后双轴转向车辆循迹控制器,输出车辆前后轴转向角命令。
[0068]
1)设定前后双轴转向车辆的转向模式pattern,pattern为1时,车辆为蟹行模式,pattern为2时,车辆为后轮随动模式,pattern为3时,车辆为前轮转向模式,pattern为4时,车辆为后轮转向模式。
[0069]
2)设定tk时刻车辆前轴转向角命令为δf(k)、车辆后轴转向角命令为δr(k),设定δ(k)为tk时刻车辆名义转向角命令,δf(k),δr(k),δ(k)满足:
[0070][0071]
3)由2)中的设定,重构车辆循迹控制系统模型的状态空间方程为:
[0072][0073]
式中h1(k)满足:
[0074][0075]
4)前后双轴转向车辆循迹控制器初始化,设定t0时刻x(0),yd(0),δ(0)和权值矩阵q,r,由设定的转向模式pattern,给定h1(0)。
[0076]
5)由智能车辆感知层获取tk时刻车辆的纵向速度v
x
(k)、侧向滑移速度vy(k)、横摆角速度ω(k)。由智能车辆导航和路径规划决策层获取tk时刻车辆质心与期望轨迹目标点处的侧向偏差e(k)、车辆质心与期望轨迹预瞄点处的侧向偏差e
l
(k)、车辆横向中心线与期望轨迹目标点处切线的航向角偏差和期望轨迹目标点处道路的曲率ρ(k)。由以上参数更新矩阵x(k),g(k)和yd(k)。
[0077]
6)tk时刻迭代求解黎卡提方程,设置迭代次数为i,pk(0)=q,pk(j)为tk时刻第j次迭代计算结果,迭代公式为:
[0078][0079]
7)计算求解tk时刻的状态反馈增益k(k),求解公式为:
[0080]
k(k)=(r+h1(k)
t
pk(i)h1(k))-1
h1(k)
t
pk(i)g(k)
ꢀꢀꢀꢀꢀꢀꢀ
(20)
[0081]
8)计算求解tk时刻的车辆名义转向角命令δ(k),求解公式为:
[0082]
δ(k)=-k(k)x(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0083]
9)由2)中的设定,求解并输出tk时刻车辆前轴转向角命令δf(k)、车辆后轴转向角命令δr(k)。
[0084]
相比于应用于前轴转向车辆的循迹控制方法,本发明方法针对轮式底盘车辆具有较广泛的应用性,可应用于前后双轴转向车辆,实现蟹行、后轮随动、前轴转向和后轴转向四种转向模式的循迹控制,也可兼容应用于前轴转向车辆的循迹控制。
[0085]
相比于其他以车辆位置与目标轨迹偏差作为控制效果期望的循迹方法,本发明方法融合了车辆横摆角速度和三种车辆位置与目标轨迹间的偏差作为控制效果期望,通过设定期望的车辆质心与轨迹目标点处的侧向偏差,保证车辆循迹时行驶轨迹与目标轨迹的贴合度,通过设定期望的车辆质心与目标轨迹预瞄点处的侧向偏差,避免车辆转向滞后,通过设定期望的横摆角速度既能配合设定的期望航向角偏差,实现循迹时车辆航向角控制,又能避免循迹行驶过程中车身横摆抖动现象,兼顾车身横摆稳定控制,保证乘员乘坐舒适性。
[0086]
相比于基于高自由度模型和复杂控制理论的循迹控制方法,本发明方法可在保证循迹精度的情况下,具有计算量较小的优势,便于向实车控制器部署。