1.本实用新型涉及燃料电池汽车控制系统领域,尤其涉及一种氢能汽车电机转速和扭矩方向自学习系统。
背景技术:
2.由于氢燃料电池汽车的普及,越来越多的电机会安装的到新能源车辆上,由于电机布置位置和方向的不同,导致电机的扭矩方向和转速方向需要根据不同的车辆配置进行标定和更改,造成了开发时间的增加和人力的浪费,同时对于项目车型较多的情况容易造成信息的混乱。
技术实现要素:
3.为了解决上述问题,本实用新型提供一种氢能汽车电机转速和扭矩方向自学习系统,能够通过系统信息进行电机转速和扭矩方向的自学习,本方法在不增加任何整车硬件成本的情况下实现,具有低成本,高可靠,高稳定,智能化等特点。
4.本实用新型提供的一种氢能汽车电机转速和扭矩方向自学习系统,系统包括:
5.氢燃料电池系统、高压配电箱、动力电池系统、后电机控制器和电机、减速器和差速器、左前轮速传感器,右前轮速传感器、左后轮速传感器,右后轮速传感器、档位单元和abs控制器;
6.左前轮速传感器、右前轮速传感器、左后轮速传感器和右后轮速传感器均通过信号采集线束与abs控制器电性连接;
7.高压配电箱与氢燃料电池系统、动力电池系统和后电机控制器和电机电气连接。
8.进一步地,系统还包括:制动踏板和油门踏板;制动踏板和油门踏板与整车vcu控制器通过信号采集线束电性连接。
9.进一步地,系统还包括:挡位单元;挡位单元与整车vcu控制器通过信号采集线束电性连接。
10.所述整车vcu控制器与氢燃料电池系统通过通讯信号线电性连接;所述氢燃料电池系统与动力电池系统和abs控制器通过通讯信号线电性连接。
11.本实用新型提供的有益效果是:系统结构简单,成本低廉,具有很好应用价值和推广价值;适用面广泛,适合所有车辆车型,具有很强的使用价值;通过对abs的采集车速速度信号的正负性和其他车辆状态信息进行判断,具有很高的可靠性和稳定性;采用多次计数的方法,同时采集相关匹配数据,策略算法的精确性,防止误判;采用平行修正方法,效率高,能及时对电机进行修正,同时又互补,能相互完善。
附图说明
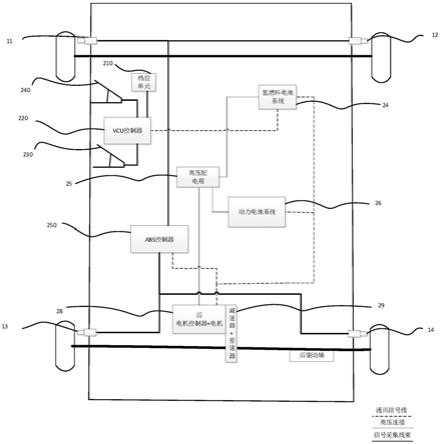
12.图1是本实用新型一种氢能汽车电机转速和扭矩方向自学习系统的结构图;
13.图2是本实用新型一种氢能汽车电机转速和扭矩方向自学习方法的流程图。
具体实施方式
14.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
15.请参考图1,一种氢能汽车电机转速和扭矩方向自学习系统,包括以下:
16.氢燃料电池系统24、高压配电箱25、动力电池系统26、后电机控制器和电机27、减速器和差速器28、左前轮速传感器11,右前轮速传感器12、左后轮速传感器13,右后轮速传感器14、档位单元210和abs控制器250;
17.左前轮速传感器11、右前轮速传感器12、左后轮速传感器13和右后轮速传感器14均通过信号采集线束与abs控制器250电性连接;
18.高压配电箱25与氢燃料电池系统24、动力电池系统26和后电机控制器和电机27电气连接。
19.系统还包括:制动踏板230和油门踏板240;制动踏板230和油门踏板240与整车vcu控制器220通过信号采集线束电性连接。
20.系统还包括:挡位单元210;挡位单元210与整车vcu控制器220通过信号采集线束电性连接。
21.所述整车vcu控制器220与氢燃料电池系统24通过通讯信号线电性连接;所述氢燃料电池系统24与动力电池系统26和abs控制器250通过通讯信号线电性连接。
22.其中,各控制器单元包括:氢燃料电池系统24,高压配电箱25,动力电池系统26,后电机控制器27,整车控制器220,250abs控制器;它们之间通过can通讯信号线进行电性连接,并进行相应的信息交互和控制。氢燃料电池系统24和动力电池系统26为行驶系统提供行驶所需的电能,高压配电箱25则将这些电能分配给电机控制器和电机27,电机控制器和电机27利用这些电能驱动电机,并将电机产生的动能通过机械连接传递给减速器和差速器28,最终动力传递给后驱动轴实现氢能汽车行驶功能。
23.abs控制器250,通过四个轮速传感器采集轮边转速信息并由这些信息计算出相应的车辆车速信息以及车辆行进方向d前进亦或倒退发送至can总线上。
24.整车vcu控制器220采集档位单元210的车辆档位信息,油门踏板240深度信息和制动踏板深度信息,并将档位信息,油门踏板深度信息和制动踏板深度信息发送到通讯信号线上,并根据驾驶员驾驶意图对电机进行控制,发送驱动扭矩,同时根据驱动状态发送驱动模式状态驱动状态和回馈状态至总线上。
25.后电机控制器和电机27根据整车vcu控制器220发送的驱动扭矩,进行驱动扭矩输出,同时发送出执行扭矩和电机当前转速。
26.请参考图2,图2是本实用新型一种氢能汽车电机转速和扭矩方向自学习方法的流程图;一种氢能汽车电机转速和扭矩方向自学习方法,应用于一种氢能汽车电机转速和扭矩方向自学习系统,包括以下步骤:
27.s1:氢能汽车上电启动;
28.s2:所述abs控制器250采集左前轮速传感器11、右前轮速传感器12、左后轮速传感器13和右后轮速传感器144个轮速传感器信号,并由此计算出车辆的车速信息和车辆行进方向d前进或倒退,发送至总线上;
29.s3:所述整车vcu控制器220采集档位单元210信息,油门踏板240深度信息ac,制动
踏板230深度信息pc,并将这些信息发送至总线上,并根据深度信息ac和深度信息pc对电机进行控制,发送驱动扭矩,同时根据驱动状态发送驱动模式状态至总线上;
30.s4:后电机控制器和电机27根据整车vcu控制器220发送的驱动扭矩,进行驱动扭矩输出,同时发送出执行扭矩和电机当前转速,并执行一致性匹配。
31.步骤s3中,所述驱动模式状态包括驱动状态和回馈状态。
32.步骤s4中,所述一致性匹配,根据不同情况,包括三种,分别为:电机扭矩和电机转速一致性匹配、电机扭矩与挡位,驱动模式一致性匹配、电机转速与车辆行进方向,挡位一致性匹配。
33.电机扭矩和电机转速一致性匹配的具体过程为:
34.s511:当电机驱动扭矩大于预设的阈值q1且持续时间大于预设的时间阈值t1,且深度信息pc小于预设的阈值c1时,若电机转速大于等于0,则扭矩与电机转速一致性匹配,进入步骤s52;否则认为一致性不匹配,并计数为1次,进入步骤s512;其中q1=50%tmax,tmax为电机最大扭矩输出,t1》=5s,c1《5%;
35.s512:重复s511步骤,当计数大于等于3时,修正电机转速方向与扭矩方向保持一致。
36.电机扭矩与挡位,驱动模式一致性匹配的具体过程为:
37.s611:当前档位为d档,且驱动模式为电动状态时,且电机扭矩》=0,且深度信息ac大于预设阈值c2且深度信息pc小于预设阈值c3或驱动模式为回馈状态时,电机扭矩《=0,深度信息pc大于预设阈值c5,则认为电机扭矩状态一致性匹配;否则为一致性不匹配,计数增加1次,进入步骤s612;其中c2》=10%,c3《5%,c4《=5%,c3《5%;
38.s612:重复s521步骤,当计数>=3时,修正电机扭矩方向,与车辆行驶状态保持一致。
39.电机转速与车辆行进方向,挡位一致性匹配的具体过程为:
40.s711:当前档位为d档,车辆行进方向d为正方向时,电机转速>0或
41.当前档位为r档,车辆行进方向d为反方向时,电机转速《0;则电机转速与车辆行进方向、挡位一致性匹配,否则为不一致性匹配,计数+1,并进入步骤s712;
42.s712:重复s711步骤,当计数>=3时,修正电机转速方向,与车辆行驶状态保持一致。
43.当三种一致性匹配结束后,统计每个过程的总修正次数,若总修正次数大于等于9,则不再进行修正。
44.本实用新型的有益效果是:系统结构简单,成本低廉,具有很好应用价值和推广价值;适用面广泛,适合所有车辆车型,具有很强的使用价值;通过对abs的采集车速速度信号的正负性和其他车辆状态信息进行判断,具有很高的可靠性和稳定性;采用多次计数的方法,同时采集相关匹配数据,策略算法的精确性,防止误判;采用平行修正方法,效率高,能及时对电机进行修正,同时又互补,能相互完善。
45.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。