1.本实用新型涉及电子助力器技术领域,具体地说是一种液压主缸电子助力器。
背景技术:
2.随着汽车技术的发展,新能源汽车不能为传统真空助力制动器提供抽真空动力,否则,需要增加真空泵;另外,新能源汽车技术也对制动器提出新的技术要求;以及人们生活水平提高对汽车驾驶和制动技术提出更高的要求。
3.所以,考虑新能源汽车技术对制动器的要求,以及现有制动器技术和成本等因素,给出了一种液压主缸电子助力器。
技术实现要素:
4.本实用新型为克服现有技术的不足,提供一种液压主缸电子助力器,由一个电子主缸及一个双腔主缸组合而成的电子助力器,大大提高了电子助力器的性能。
5.为实现上述目的,设计一种液压主缸电子助力器,包括制动储液罐、踏板、主缸、电机,其特征在于:踏板的末端连接第一主缸,所述的第一主缸为双腔式主缸,第一主缸的两个进油口分别连接制动储液罐的两个油腔;制动储液罐的一个油腔通过单向阀连接第二主缸的出油口,制动储液罐的另一个油腔连接第一电磁阀的一端,第一电磁阀的另一端分别连接第二电磁阀及第四电磁阀的一端,第二电磁阀的另一端连接第一主缸的一个出油口;第四电磁阀的另一端分别连接第二主缸的进油口及第五电磁阀的一端;第五电磁阀的另一端连接第三电磁阀的一端,第三电磁阀的另一端分别连接第一主缸的另一个出油口及第六电磁阀的一端,第六电磁阀的另一端连接踏板模拟器;所述的第二主缸的前端连接电机。
6.所述的第一主缸的一个进油口与制动储液罐的一个油腔连接,第一主缸的另一个进油口通过单向节流阀与制动储液罐的另一个油腔连接。
7.位于第三电磁阀及第一主缸的通路上设有压力传感器。
8.位于制动储液罐的一侧设有液位传感器。
9.位于踏板末端的一侧设有踏板位移传感器。
10.位于电机的一侧设有电机角度传感器。
11.本实用新型同现有技术相比,提供一种液压主缸电子助力器,由一个电子主缸及一个双腔主缸组合而成的电子助力器,大大提高了电子助力器的性能。
12.该电子助力器可以实现助力、主动刹车、能量回收、被动建压及自检等功能,不仅提高了电子助力器的整体性能,而且能够满足新能源汽车的性能及客户的要求。
附图说明
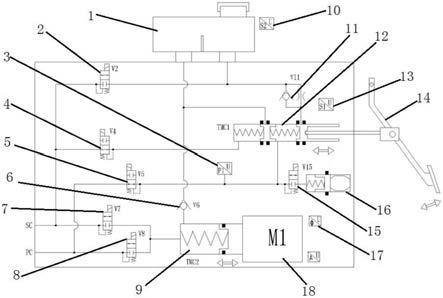
13.图1为本实用新型结构连接示意图。
14.图2为本实用新型在助力阶段时连接示意图。
15.图3为本实用新型在主动刹车阶段连接示意图。
16.图4为本实用新型在能量回收阶段连接示意图。
17.图5为本实用新型在被动建压阶段连接示意图。
18.图6为本实用新型在自检阶段连接示意图。
19.参见图1,1为制动储液罐,2为第一电磁阀,3为压力传感器,4为第二电磁阀,5为第三电磁阀,6为单向阀,7为第四电磁阀,8为第五电磁阀,9为第二主缸,10为液位传感器,11为单向节流阀,12为第一主缸,13为踏板位移传感器,14为踏板,15为第六电磁阀,16为踏板模拟器,17为电机角度传感器,18为电机。
具体实施方式
20.下面根据附图对本实用新型做进一步的说明。
21.如图1所示,踏板14的末端连接第一主缸12,所述的第一主缸12为双腔式主缸,第一主缸12的两个进油口分别连接制动储液罐1的两个油腔;制动储液罐1的一个油腔通过单向阀6连接第二主缸9的出油口,制动储液罐1的另一个油腔连接第一电磁阀2的一端,第一电磁阀2的另一端分别连接第二电磁阀4及第四电磁阀7的一端,第二电磁阀4的另一端连接第一主缸12的一个出油口;第四电磁阀7的另一端分别连接第二主缸9的进油口及第五电磁阀8的一端;第五电磁阀8的另一端连接第三电磁阀5的一端,第三电磁阀5的另一端分别连接第一主缸12的另一个出油口及第六电磁阀15的一端,第六电磁阀15的另一端连接踏板模拟器16;所述的第二主缸9的前端连接电机18。
22.第一主缸12的一个进油口与制动储液罐1的一个油腔连接,第一主缸12的另一个进油口通过单向节流阀11与制动储液罐1的另一个油腔连接。
23.位于第三电磁阀5及第一主缸12的通路上设有压力传感器3。
24.位于制动储液罐1的一侧设有液位传感器10。
25.位于踏板14末端的一侧设有踏板位移传感器13。
26.位于电机18的一侧设有电机角度传感器17。
27.如图2所示,当助力器在助力阶段时,第二电磁阀4及第三电磁阀5上电关闭,第四电磁阀7、第五电磁阀8及第六电磁阀15上电打开,第一电磁阀2去电关闭,踏板14运动,推动第一主缸12,压力传感器3监控第一主缸12的制动压力,踏板位移传感器13监控踏板14的推杆位移,电机18根据压力传感器3及踏板位移传感器13的信号,通过ecu(电子控制模块)计算出旋转方向、推力、行程、速度,电机18工作带动传动机构推动第二主缸9,产生制动压力,助力过程中,系统通过压力传感器3及踏板位移传感器13的信号来识别驾驶员的制动意图,电机18做出相应的加压,保持,卸荷等相应动作。
28.如图3所示,当助力器在主动刹车阶段时,第二电磁阀4及第三电磁阀5上电关闭,第四电磁阀7、第五电磁阀8及第六电磁阀15上电打开,第一电磁阀2去电关闭,ecu(电子控制模块)根据整车输出的制动要求,重新计算出旋转方向、推力、行程、速度,电机18工作带动传动机构推动第二主缸9,产生制动压力,并且连续采集整车信号,ecu(电子控制模块)同步调整电机18的动作参数。
29.如图4所示,当助力器在能量回收阶段时,第二电磁阀4及第三电磁阀5上电关闭,第四电磁阀7及第五电磁阀8去电关闭,第六电磁阀15上电打开,踏板14运动,推动第一主缸12,压力传感器3监控第一主缸12的制动压力,踏板位移传感器13监控踏板14的推杆位移,
整车驱动电机首先利用拖制力发电制动,液压制动先不介入,但踏板模拟系统仍然起作用,给驾驶员提供制动脚感,如果能量回收制动无法满足制动需求,液压制动系统需要介入,ecu(电子控制模块)配合整车控制器完成液压制动动作,第四电磁阀7及第五电磁阀8上电打开,系统通过压力传感器3及踏板位移传感器13的信号来识别驾驶员的制动意图,电机18做出相应的加压,保持,卸荷等相应动作,实现能量回收功能。
30.如图5所示,当助力器在被动建压阶段时,第二电磁阀4及第三电磁阀5去电打开,第四电磁阀7、第五电磁阀8及第六电磁阀15去电关闭,第一电磁阀2去电关闭,踏板14运动,推动第一主缸12直接输出制动压力。
31.如图6所示,当助力器在自检阶段时,ecu(电子控制模块)发指令给esp(车身稳定性控制系统)关闭pc(主缸第一压力腔)/sc(主缸第二压力腔)两腔,第三电磁阀5及第五电磁阀8上电打开,第一电磁阀2、第二电磁阀4及第四电磁阀7去电关闭,电机18根据ecu(电子控制模块)自检参数运动,推动第二主缸9前进,第二主缸9液压经过第三电磁阀5及第五电磁阀8进入第一主缸12,第一主缸12通过单向节流阀11进入制动储液罐1产生压差,压力传感器3判断压差以及电机角度传感器17输出相应位置信号给ecu(电子控制模块),判断全行程自检结果。