1.本发明涉及一种照地灯控制系统及其控制方法,属于车灯控制领域。
背景技术:
2.目前,在汽车普及度越来越高的今天,人们对自己爱车的灯饰也越来越在意,其中关注度最高的莫过于照地灯了。现在汽车一般都自带有照地灯,通过在地面打出灯光图案来达到迎宾的效果。但现有方案大多只是应用于迎宾功能,即通过智能钥匙识别车主,当车主靠近时提前打开照地灯,起到一种迎宾的效果,应用场景较窄。
技术实现要素:
3.本发明所要解决的技术问题是,克服现有技术的不足,提供一种照地灯控制系统及其控制方法,当车辆处于哨兵模式、转向模式和停车开门模式下时,进行不同方式的照地投影,对车辆周围的行人和行车进行警示。
4.为了解决上述技术问题,本发明的技术方案是:
5.一种照地灯控制系统,它包括感知单元、控制单元和执行单元,所述感知单元通过can总线与控制单元的输入端相连,所述控制单元的输出端与执行单元相连;
6.所述控制单元包括can收发器、mcu处理单元、lin收发器、led驱动芯片和电机驱动芯片,所述感知单元通过can总线与can收发器的输入端相连,所述can收发器的输出端与mcu处理单元相连,所述led驱动芯片的输入端通过spi总线与mcu处理单元相连,所述lin收发器的输入端通过lin总线与mcu处理单元相连,所述lin收发器的输出端与电机驱动芯片的输入端相连;
7.所述执行单元包括投影led灯组和灯头步进电机,所述投影led灯组的输入端与led驱动芯片的输出端相连,所述灯头步进电机的输入端与电机驱动芯片的输出端相连,所述灯头步进电机的输出端与投影led灯组相连,所述灯头步进电机用于驱动投影led灯组转动。
8.进一步,所述感知单元包括毫米波雷达感知模块和bcm,所述毫米波雷达感知模块的输出端和bcm的输出端分别通过can总线与can收发器的输入端相连。
9.进一步,所述led驱动芯片设置有左右两个,所述投影led灯组设置有左右两组,两组所述投影led灯组分别安装于左右后视镜的下方。
10.进一步,所述电机驱动芯片设置有左右两个,所述灯头步进电机设置有左右两个,两个所述灯头步进电机分别安装于左右后视镜内。
11.一种照地灯控制系统的控制方法,它包括:
12.步骤s1、所述照地灯控制系统预设车辆的三种控制模式,三种控制模式包括哨兵模式、转向模式和停车开门模式;
13.步骤s2、所述照地灯控制系统判断车辆当前处于哪种控制模式,并对所述投影led灯组进行相应的控制:
14.判断车辆是否处于停车锁止状态,若处于停车锁止状态,则继续判断车辆当前是否为哨兵模式,若车辆处于哨兵模式,则进入步骤s3;
15.若车辆未处于哨兵模式,则判断车辆是否处于停车开门模式,若处于停车开门模式,则进入步骤s4;
16.若车辆既不处于哨兵模式,又不处于停车开门模式,则通过转向灯是否打开以及方向盘转动角度是否超过阈值来判断车辆是否处于转向模式,若车辆处于转向模式,则进入步骤s5;
17.步骤s3、当目标物靠近车辆时,若毫米波雷达感知模块识别到目标物,所述控制单元中的mcu处理单元根据毫米波雷达感知模块发出的目标物位置信息,向灯头步进电机发送控制命令,实时地在车辆y方向调节投影led灯组的投影位置,点亮投影led灯组,直至毫米波雷达感知模块的识别范围内无目标物,则哨兵模式结束,所述投影led灯组回到初始投影位置y0;
18.步骤s4、首先判断车辆的后侧门是否打开,若后侧门打开,则所述控制单元中的mcu处理单元发送灯头步进电机控制命令,所述灯头步进电机控制开门侧的投影led灯组转动到对应的开门投影位置y3,点亮开门侧的投影led灯组;若车辆的后侧门未打开,则投影led灯组熄灭并恢复至初始投影位置y0,判断车辆是否处于转向模式,若车辆处于转向模式,则进入步骤s5;
19.然后判断车辆的前侧门是否打开,若前侧门打开,则所述控制单元中的mcu处理单元发送灯头步进电机控制命令,所述灯头步进电机控制开门侧的投影led灯组转动到对应的开门投影位置y2,点亮开门侧的投影led灯组;若车辆的前侧门未打开,则投影led灯组熄灭并恢复至初始投影位置y0,判断车辆是否处于转向模式,若车辆处于转向模式,则进入步骤s5;
20.步骤s5、当车辆向一侧进行转向时,所述控制单元中的mcu处理单元发送灯头步进电机控制命令,车辆一侧的灯头步进电机控制该侧的投影led灯组转动至转向投影位置y1处后,点亮该侧的投影led灯组,当转向结束后,该侧灯头步进电机重新恢复到初始投影位置y0。
21.进一步,所述步骤s3中的目标物为非车主人员或其他车辆。
22.进一步,所述步骤s4中,当车辆开门侧的两个车门同时被打开时,所述控制单元中的mcu处理单元发送灯头步进电机控制命令,所述灯头步进电机控制开门侧的投影led灯组转动至开门投影位置y3处后,激活投影led灯组。
23.进一步,所述开门投影位置y2为车辆开门侧的前门位置,所述开门投影位置y3为车辆开门侧的后门位置。
24.进一步,所述停车开门模式的优先级高于哨兵模式和转向模式的优先级。
25.采用了上述技术方案,本发明在车主设置哨兵模式并锁车后,在非车主人员或其他车辆距离车辆四周1~2米范围内时,照地灯功能被激活,投影led灯组可在车辆左右范围内投影警示图案。同时,在车辆行驶转弯时,投影led灯组可自动在车辆转弯侧前方投影转弯标识,以起到提醒电动车或者行人的作用。进一步,当车辆停车开门时,相应侧车门被打开时,投影led灯组可在对应车门范围内,投影警示图标,提醒其他交通参与者,以防止因突然车门打开而造成对他人的伤害事故。
附图说明
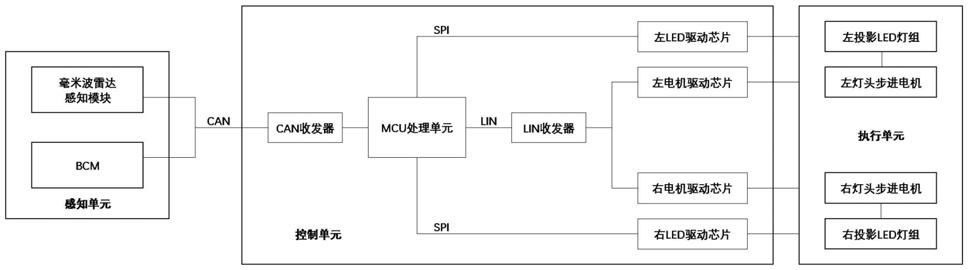
26.图1为本发明的一种照地灯控制系统的系统架构图;
27.图2为本发明的投影led灯组的投影位置示意图;
28.图3为本发明的一种照地灯控制系统的控制方法的逻辑流程图。
具体实施方式
29.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
30.实施例一
31.如图1所示,本实施例提供一种照地灯控制系统,它包括感知单元、控制单元和执行单元,感知单元通过can总线与控制单元的输入端相连,控制单元的输出端与执行单元相连。
32.其中,控制单元包括can收发器、mcu处理单元、lin收发器、led驱动芯片和电机驱动芯片。
33.感知单元通过can总线与can收发器的输入端相连,can收发器的输出端与mcu处理单元相连。
34.led驱动芯片的输入端通过spi总线与mcu处理单元相连,由mcu处理单元通过led驱动芯片实现投影led灯组的亮度以及亮灭控制。lin收发器的输入端通过lin总线与mcu处理单元相连,lin收发器的输出端与电机驱动芯片的输入端相连,mcu处理单元与电机驱动芯片之间通过lin总线相连,用于发送电机控制命令及接收电机反馈信息。
35.其中,感知单元包括毫米波雷达感知模块和bcm,毫米波雷达感知模块的输出端和bcm的输出端分别通过can总线与can收发器的输入端相连。毫米波雷达感知模块又用于感知车辆周围是否有非车主人员或其他车辆,车身bcm用于向控制单元发送车辆转向灯信号、方向盘转角信号以及车门状态信息。
36.其中,执行单元包括投影led灯组和灯头步进电机,投影led灯组的输入端与led驱动芯片的输出端相连,灯头步进电机的输入端与电机驱动芯片的输出端相连,灯头步进电机的输出端与投影led灯组相连,灯头步进电机用于驱动投影led灯组转动。
37.本实施例中的led驱动芯片设置有左右两个,投影led灯组设置有左右两组,两组投影led灯组分别安装于左右后视镜的下方。
38.本实施例中的电机驱动芯片设置有左右两个,灯头步进电机设置有左右两个,两个灯头步进电机分别安装于左右后视镜内。
39.照地灯控制系统的工作原理如下:
40.在车辆行驶过程中,如转弯时,控制单元通过bcm获取车辆转向灯信号和方向盘转角信号,以判断车辆是否处于转弯工况。当系统判断车辆处于转弯工况时,系统的控制单元则控制投影灯组及电机在车辆转弯侧前方投影转弯标识,以起到提醒电动车或者行人的作用。
41.当车辆停车开门时,相应侧车门打开时,控制单元通过can总线可获取bcm发送的车门状态信息。当车门打开时,照地灯可在对应打开的车门侧,投影提醒图标,提醒其他交通参与者,以防止因突然车门打开而造成对他人的伤害事故。
42.此外,当系统处于哨兵模式时,电机的运行位置根据毫米波感知模块发送的人和车的位置进行实时调节;转向模式、停车开门模式下,灯头步进电机的运行根据预先存储再mcu处理单元内的预值来执行。
43.实施例二
44.如图3所示,本实施例提供一种照地灯控制系统的控制方法,它包括:
45.步骤s1、照地灯控制系统预设车辆的三种控制模式,三种控制模式包括哨兵模式、转向模式和停车开门模式。如图2所示,设哨兵模式下投影led灯组的初始投影位置为y0;转向模式下投影led灯组沿y方向运行到预设位置为y1;停车开门模式下投影led灯组在车辆开门侧的前门投影位置为y2,后门投影位置为y3。
46.步骤s2、照地灯控制系统判断车辆当前处于哪种控制模式,并对投影led灯组进行相应的控制:
47.判断车辆是否处于停车锁止状态,若处于停车锁止状态,则继续判断车辆当前是否为哨兵模式,若车辆处于哨兵模式,则进入步骤s3;
48.若车辆未处于哨兵模式,则判断车辆是否处于停车开门模式,若处于停车开门模式,则进入步骤s4;
49.若车辆既不处于哨兵模式,又不处于停车开门模式,则通过转向灯是否打开以及方向盘转动角度是否超过阈值来判断车辆是否处于转向模式,若车辆处于转向模式,则进入步骤s5。
50.步骤s3、当目标物靠近车辆时,若毫米波雷达感知模块识别到目标物,控制单元中的mcu处理单元根据毫米波雷达感知模块发出的目标物位置信息,向灯头步进电机发送控制命令,实时地在车辆y方向调节投影led灯组的投影位置,点亮投影led灯组,直至毫米波雷达感知模块的识别范围内无目标物,则哨兵模式结束,投影led灯组回到初始投影位置y0。
51.步骤s4、首先判断车辆的后侧门是否打开,若后侧门打开,则控制单元中的mcu处理单元发送灯头步进电机控制命令,灯头步进电机控制开门侧的投影led灯组转动到对应的开门投影位置y3,点亮开门侧的投影led灯组;若车辆的后侧门未打开,则投影led灯组熄灭并恢复至初始投影位置y0,判断车辆是否处于转向模式,若车辆处于转向模式,则进入步骤s5;
52.然后判断车辆的前侧门是否打开,若前侧门打开,则控制单元中的mcu处理单元发送灯头步进电机控制命令,灯头步进电机控制开门侧的投影led灯组转动到对应的开门投影位置y2,点亮开门侧的投影led灯组;若车辆的前侧门未打开,则投影led灯组熄灭并恢复至初始投影位置y0,判断车辆是否处于转向模式,若车辆处于转向模式,则进入步骤s5;
53.其中,当车辆开门侧的前后两个车门同时被打开时,控制单元中的mcu处理单元发送灯头步进电机控制命令,灯头步进电机控制开门侧的投影led灯组转动至开门投影位置y3处后,点亮开门侧的投影led灯组。
54.步骤s5、当车辆向一侧进行转向时,控制单元中的mcu处理单元发送灯头步进电机控制命令,车辆一侧的灯头步进电机控制该侧的投影led灯组转动至转向投影位置y1处后,点亮该侧的投影led灯组,当转向结束后,该侧灯头步进电机重新恢复到初始投影位置y0。
55.本实施例中所指的目标物为非车主人员或其他车辆。
56.本实施例的停车开门模式的优先级高于哨兵模式和转向模式的优先级,即当转向灯处于开启状态的同时打开车门,控制单元执行停车开门模式的相关控制命令。这种模式适用于车辆靠边停车开双跳灯,车上有乘客下车的情况。
57.以上所述的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。