1.本公开涉及数据处理技术领域,尤其涉及检测异常驾驶行为的方案。
背景技术:
2.随着汽车行业的不断发展,以及人们对驾乘体验的需求攀升,人们对规避交通风险的需求日益增长。其中,检测异常驾驶行为是评估司机驾驶风险和预防交通事故的重要手段。异常驾驶行为例如超速行驶、不按交通指示信号行驶等等。
3.其中,随着经济社会的发展,移动设备(如,智能手机)已经成为人们生活中不可缺少的设备。驾驶人员在驾驶车辆的过程中,经常会存在查看手机、接听电话等行为,开车时使用诸如手机之类的移动设备,已日益成为造成交通事故的异常(危险)驾驶行为的主要原因之一。
4.针对驾驶过程中使用手机这一异常驾驶行为,目前大多数检测方案,都是在驾驶室安装摄像头,来采集驾驶员在驾驶过程中的视频图像信息,之后,通过计算机视觉领域的算法来进行识别。现有方案需要在车辆上布置摄像头,且识别结果依赖后端图像处理算法。
5.因此,针对驾驶过程中使用手机这一异常驾驶行为,需要一种新的检测方案。
技术实现要素:
6.本公开提供了一种检测异常驾驶行为的方法、装置及计算设备,以力图解决或者至少缓解上面存在的至少一个问题。
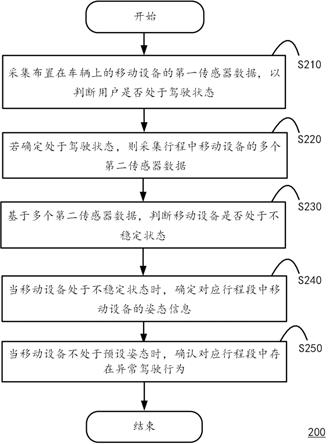
7.根据本公开的一个方面,提供了一种检测异常驾驶行为的方法,包括步骤:采集布置在车辆上的移动设备的第一传感器数据,以判断用户是否处于驾驶状态;若确定处于驾驶状态,则采集行程中移动设备的多个第二传感器数据;基于多个第二传感器数据,判断移动设备是否处于不稳定状态;当移动设备处于不稳定状态时,确定对应行程段中移动设备的姿态信息;当移动设备不处于预设姿态时,确认对应行程段中存在异常驾驶行为。
8.可选地,在根据本公开的方法中,基于多个第二传感器数据,判断移动设备是否处于不稳定状态的步骤包括:基于各第二传感器数据,分别提取指示移动设备的朝向信息的各特征角度;基于所提取的特征角度,对行程进行分段,以得到至少一个行程段;分别确定移动设备在各行程段的状态。
9.可选地,在根据本公开的方法中,特征角度为移动设备的屏幕所在平面的法线与垂直地面的射线之间的夹角。
10.可选地,在根据本公开的方法中,基于各第二传感器数据,分别提取指示移动设备的朝向信息的各特征角度的步骤包括:基于关于射线的第一向量,生成第一四元数;利用各第二传感器数据,分别对第一四元数进行旋转,来生成对应的第二四元数;基于各第二四元数,生成对应的第二向量;分别确定第一向量与各第二向量之间的角度,作为对应的特征角度。
11.可选地,在根据本公开的方法中,基于特征角度,对行程进行分段,以得到至少一
个行程段的步骤包括:利用变点检测算法,对特征角度进行处理,来将行程分为至少一个行程段。
12.可选地,在根据本公开的方法中,分别确定移动设备在各行程段的状态的步骤包括:分别计算各行程段内的特征角度的均值和方差;检测由均值和方差指向的点,与预定区域的位置关系;基于位置关系,确定移动设备在各行程段的状态,状态包括稳定状态和不稳定状态。
13.可选地,在根据本公开的方法中,检测由均值和方差指向的点,与预定区域的位置关系的步骤包括:利用预定义的第一曲线和第二曲线,组成预定区域;检测由均值和方差指向的点,与预定区域的位置关系,其中位置关系包括:所指向的点的坐标在预定区域内,或,所指向的点的坐标不在预定区域内。
14.可选地,在根据本公开的方法中,基于位置关系,确定移动设备在各行程段的状态的步骤包括:若所指向的点的坐标在预定区域内,则移动设备在对应行程段为不稳定状态;若所指向的点的坐标不在预定区域内,则移动设备在对应行程段为稳定状态。
15.可选地,根据本公开的方法还包括步骤:若移动设备在行程段中处于不稳定状态,则利用行程段内的第二传感器数据,来确定对应行程段中移动设备的姿态信息。
16.可选地,根据本公开的方法还包括步骤:基于移动设备水平放置时指向其顶端的射线,生成第三四元数;利用行程段内的各第二传感器数据,分别对第三四元数进行旋转,来对应生成各第四四元数;基于各第四四元数,确定移动设备在行程段内的各姿态信息,其中,移动设备的姿态信息包括:移动设备的顶端相对于水平面的倾斜方向。
17.可选地,根据本公开的方法还包括步骤:若移动设备在行程段内的各姿态信息均不处于预设状态,则确认对应行程段中存在异常驾驶行为。预设姿态包括:移动设备的顶端相对于水平面向下倾斜。
18.可选地,在根据本公开的方法中,第一传感器数据至少包括速度,第二传感器数据至少包括四元数位姿。
19.根据本公开的另一方面,提供了一种检测异常驾驶行为的装置,包括:数据采集单元,适于采集布置在车辆上的移动设备的第一传感器数据,并在确定处于驾驶状态时,采集行程中对应的移动设备的多个第二传感器数据;驾驶状态确定单元,适于基于第一传感器数据,判断用户是否处于驾驶状态;姿态信息确定单元,适于基于第二传感器数据,判断移动设备是否处于不稳定状态,还适于在移动设备处于不稳定状态时,确定对应行程段中移动设备的姿态信息;异常驾驶行为确定单元,适于在移动设备不处于预设姿态时,确认对应行程段中存在异常驾驶行为。
20.根据本公开的再一方面,提供了一种计算设备,包括:一个或多个处理器存储器;一个或多个程序,其中所述一个或多个程序存储在存储器中并被配置为由一个或多个处理器执行,一个或多个程序包括用于执行如上任一方法的指令。
21.根据本公开的再一方面,提供了一种存储一个或多个程序的计算机可读存储介质,一个或多个程序包括指令,指令在被计算设备执行时,使得计算设备执行如上所述的任一方法。
22.综上所述,根据本公开的方案,先利用移动设备的第一传感器数据,判断用户是否处于驾驶状态。当确认处于驾驶状态时,再开始采集第二传感器数据,并通过分析第二传感
器数据,来对整个行程进行分段;之后,通过提取行程段中的姿态特征,来判断行程段中是否存在异常驾驶行为。
23.基于本方案,无需引入额外设备(如摄像头),仅使用移动设备的传感器数据,就可以分析并判断用户是否在驾驶车辆的过程中有使用移动设备的分心驾驶行为。
附图说明
24.为了实现上述以及相关目的,本文结合下面的描述和附图来描述某些说明性方面,这些方面指示了可以实践本文所公开的原理的各种方式,并且所有方面及其等效方面旨在落入所要求保护的主题的范围内。通过结合附图阅读下面的详细描述,本公开的上述以及其它目的、特征和优势将变得更加明显。遍及本公开,相同的附图标记通常指代相同的部件或元素。
25.图1示出了根据本公开一些实施例的计算设备100的示意图;图2示出了根据本公开一些实施例的检测异常驾驶行为的方法200的流程示意图;图3示出了根据本公开一个实施例的预定区域的示意图;图4示出了根据本公开一些实施例的几种放置移动设备的情形的示意图;图5示出了根据本公开一些实施的检测异常驾驶行为的装置500的示意图。
具体实施方式
26.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
27.根据本公开的检测异常驾驶行为的方案,仅利用移动设备(如,智能手机)本身,来检测用户是否在驾驶车辆的过程中使用该移动设备。由于移动设备系统的限制、和数据的封闭性,通常很难直接获取用户是否在使用某个app(应用程序)。根据本公开的方案,获取移动设备中的传感器数据,利用这些传感器数据来确定出移动设备的姿态特征,进而分析出用户是否在驾驶车辆的过程中使用移动设备。
28.根据本公开,通过计算设备来执行检测异常驾驶行为的方法。根据本公开的一些实施方式,计算设备可以与移动设备相耦接,来获取移动设备上的相关传感器数据,以对其进行处理,进而分析出移动设备的姿态特征。根据本公开的另一些实施方式,计算设备也可以被实现为微型计算模块等,布置在移动设备中,采集相关传感器数据,并对其进行处理,进而分析出移动设备的姿态特征。本发明的实施例对此均不做限制。
29.图1是示例性的计算设备100的构造图。
30.如图1所示,在基本配置102中,计算设备100典型地包括系统存储器106和一个或者多个处理器104。存储器总线108可以用于在处理器104和系统存储器106之间的通信。
31.取决于期望的配置,处理器104可以是任何类型的处理,包括但不限于:微处理器(
µ
p)、微控制器(
µ
c)、数字信息处理器(dsp)或者它们的任何组合。处理器104可以包括诸如一级高速缓存110和二级高速缓存112之类的一个或者多个级别的高速缓存、处理器核心114和寄存器116。示例的处理器核心114可以包括运算逻辑单元(alu)、浮点数单元(fpu)、
数字信号处理核心(dsp核心)或者它们的任何组合。示例的存储器控制器118可以与处理器104一起使用,或者在一些实现中,存储器控制器118可以是处理器104的一个内部部分。
32.取决于期望的配置,系统存储器106可以是任意类型的存储器,包括但不限于:易失性存储器(诸如ram)、非易失性存储器(诸如rom、闪存等)或者它们的任何组合。计算设备中的物理内存通常指的是易失性存储器ram,磁盘中的数据需要加载至物理内存中才能够被处理器104读取。系统存储器106可以包括操作系统120、一个或者多个应用122以及程序数据124。在一些实施方式中,应用222可以布置为在操作系统上由一个或多个处理器104利用程序数据124执行指令。操作系统120例如可以是linux、windows等,其包括用于处理基本系统服务以及执行依赖于硬件的任务的程序指令。应用122包括用于实现各种用户期望的功能的程序指令,应用122例如可以是浏览器、即时通讯软件、软件开发工具(例如集成开发环境ide、编译器等)等,但不限于此。当应用122被安装到计算设备100中时,可以向操作系统120添加驱动模块。
33.在计算设备100启动运行时,处理器104会从存储器106中读取操作系统120的程序指令并执行。应用122运行在操作系统120之上,利用操作系统120以及底层硬件提供的接口来实现各种用户期望的功能。当用户启动应用122时,应用122会加载至存储器106中,处理器104从存储器106中读取并执行应用122的程序指令。
34.计算设备100还包括存储设备132,存储设备132包括可移除存储器136和不可移除存储器138,可移除存储器136和不可移除存储器138均与存储接口总线134连接。
35.计算设备100还可以包括有助于从各种接口设备(例如,输出设备142、外设接口144和通信设备146)到基本配置102经由总线/接口控制器130的通信的接口总线140。示例的输出设备142包括图形处理单元148和音频处理单元150。它们可以被配置为有助于经由一个或者多个a/v端口152与诸如显示器153或者扬声器之类的各种外部设备进行通信。示例外设接口144可以包括串行接口控制器154和并行接口控制器156,它们可以被配置为有助于经由一个或者多个i/o端口158和诸如输入设备(例如,键盘、鼠标、笔、语音输入设备、触摸输入设备)或者其他外设(例如打印机、扫描仪等)之类的外部设备进行通信。示例的通信设备146可以包括网络控制器160,其可以被布置为便于经由一个或者多个通信端口164与一个或者多个其他计算设备162通过网络通信链路的通信。
36.网络通信链路可以是通信介质的一个示例。通信介质通常可以体现为在诸如载波或者其他传输机制之类的调制数据信号中的计算机可读指令、数据结构、程序模块,并且可以包括任何信息递送介质。“调制数据信号”可以是这样的信号,它的数据集中的一个或者多个或者它的改变可以在信号中编码信息的方式进行。作为非限制性的示例,通信介质可以包括诸如有线网络或者专线网络之类的有线介质,以及诸如声音、射频(rf)、微波、红外(ir)或者其它无线介质在内的各种无线介质。这里使用的术语计算机可读介质可以包括存储介质和通信介质二者。
37.计算设备100还包括与总线/接口控制器130相连的存储接口总线134。存储接口总线134与存储设备132相连,存储设备132适于进行数据存储。示例的存储设备132可以包括可移除存储器136(例如cd、dvd、u盘、可移动硬盘等)和不可移除存储器138(例如硬盘驱动器hdd等)。
38.一般地,计算设备100可以实现为小尺寸便携(或者移动)电子设备的一部分,这些
电子设备可以是诸如蜂窝电话、数码照相机、个人数字助理(pda)、个人媒体播放器设备、无线网络浏览设备、个人头戴设备、应用专用设备、或者可以包括上面任何功能的混合设备。
39.在根据本公开的计算设备100中,应用122包括用于执行本公开的定位数据的处理方法200的指令。上述指令可以指示处理器104执行本公开的上述方法,以实现对传感器数据的处理及对异常驾驶行为的判定等。
40.图2示出了根据本公开一些实施例的检测异常驾驶行为的方法200的流程示意图。如图2所示,方法200始于步骤s210。
41.在步骤s210中,采集布置在车辆上的移动设备的第一传感器数据,以判断用户是否处于驾驶状态。
42.需要说明的是,该用户即为车辆驾驶人员,该移动设备为车辆驾驶人员的移动设备。应当了解,本方案不考虑车辆上非驾驶人员(如,乘客)使用自己的移动设备的情况。
43.根据本公开的实施例,第一传感器数据至少包括速度,可以通过gnss接收机来获取。全球导航卫星系统(gnss),是目前军用、民用都会使用到的定位技术。目前国际上提供服务的导航卫星系统,主要包括美国的 gps,俄罗斯的 glonass,欧盟的 galileo,以及中国的北斗卫星导航系统。移动设备可以通过使用对应的接收机,来获取多个导航卫星的信号。通过相对论效应等物理定律,可以进而计算出移动设备所处的地理位置和速度、方向等信息。
44.在一种实施例中,利用 gnss接收机提供的速度信息,采集频率设置1hz。当速度值大于10km/h且小于200km/h时,就确定该移动设备所指向的用户,处于驾驶状态。
45.若确定处于驾驶状态,则在随后在步骤s220中,采集行程中移动设备的多个第二传感器数据。
46.根据本公开的实施例,第二传感器数据至少包括四元数位姿,通常通过惯性测量单元(imu)来获取。imu包含加速度计、陀螺仪、磁感应器,是检测和测量加速度与旋转运动的传感器。它可以输出移动设备在三个轴上的加速度、角速度、以及四元数位姿。
47.根据一种实施方式,计算设备一直监听来自gnss接收机中的速度,当其满足预定条件(即,大于10km/h且小于200km/h)时,确定在驾驶状态,将该时间点记作t1。自t1时刻起,计算设备开始采集来自imu的四元数,并对其进行处理。同时,计算设备继续监听gnss接收机的速度,直到速度不满足预定条件,即不在驾驶状态时(记作t2时刻),停止对四元数的采集和处理。这样,自t1至t2时刻,记作一次行程。在一次行程中,可以采集到多个第二传感器数据。在一种实施例中,采集第二传感器数据的采集频率设置10 hz,即每隔100毫秒采集一次。
48.随后,在步骤s230中,基于所采集的多个第二传感器数据,判断移动设备是否处于不稳定状态。
49.根据本公开的实施方式,由于车辆存在转弯,移动设备的姿态中的朝向信息,也会随着车辆转弯在水平方向上更改朝向。因此,提取移动设备在垂直于地面的方向上的姿态变化,进而判断移动设备是否处于不稳定的状态。
50.根据本公开的一些实施例,步骤s230可以分为3个子步骤来实现,即如下的步骤s232至步骤s236。
51.在步骤s232中,基于采集的各第二传感器数据,分别提取指示该移动设备的朝向
信息的各特征角度。换言之,针对每一个第二传感器数据,提取出其对应的特征角度。
52.在一种实施例中,特征角度为移动设备的屏幕所在平面的法线、与垂直地面的射线(记作v)之间的夹角,记作a。并且,当移动设备屏幕朝上且水平放置时,a为0度。当移动设备屏幕朝下且水平放置时,a为180度。当移动设备屏幕垂直于地面时,a为90度。
53.根据一种实施例,在计算特征角度时,使用四元数旋转公式,将射线v所指示的向量进行旋转,得到新向量。再根据平面向量夹角公式,计算两个向量之间的角度,即为要提取的特征角度。
54.具体计算过程如下。
55.首先,基于关于射线v的第一向量,生成第一四元数。射线v的第一向量表示为:。通常可以采用向量与纯量结合的方式,来描述四元数,在本实施例中,将补全为四元数,记作第一四元数:。
56.接着,利用第二传感器数据,对第一四元数进行旋转,来生成第二四元数。
57.四元旋转公式为:,其中,为第二四元数,为第一四元数,为第二传感器数据,为的逆元。从该四元旋转公式可以看到,计算第二四元数,即对、、进行乘法运算。
58.接着,基于第二四元数,生成第二向量。在本实施例中,第二向量为第二四元数的(x,y,z)分量。设第二四元数为,那么, 。
59.最后,确定第一向量与第二向量之间的角度,作为特征角度。
60.在本实施例中,通过平面向量夹角公式来确定该特征角度,如下所示:。
61.在步骤s234中,基于特征角度,对本次行程进行分段,以得到至少一个行程段。
62.根据一种实施例,将整个行程,按照特征角度的变化趋势来进行分段。也就是,当某一段内的特征角度的变化趋势一致时,就认为这一段对应的移动设备的姿态基本没变化。特征角度的变化趋势例如可以是:稳定地保持在某一范围、持续增长、持续减小等等,本公开对此不作过多限制。
63.具体地,利用变点检测算法,对计算所得的这若干个特征角度进行处理,以实现确定特征角度变化趋势的目的,来将行程分为至少一个行程段。
64.在一种实施例中,定义总代价函数为:,式中,是划分出的区间集合,表示第段区间,是第段区间上的代价,这里取一段区间上的特征角度的方差,作为这段区间上的代价,是一共划分的区间个数,
是惩罚项,即鼓励划分更少段区间。可选地,取20。关于特征角度的方差计算,属于本领域技术人员已知内容,故此处不再具体描述。
65.基于上述总代价函数,通过调用pelt(pruned exact linear time)变点检测算法,来确定出整个行程中,进行行程分段的一个或多个分界点,进而将整个行程分为至少一个行程段。
66.应当了解,当没有分界点时,整个行程就是一个行程段。
67.在步骤s236中,分别确定该移动设备在各行程段的状态。根据本公开的实施方式,移动设备的状态包括稳定状态和不稳定状态。
68.具体地,通过如下三步来确定各行程段的状态。
69.第一步,针对步骤s234中确定出的各行程段,分别计算每个行程段内的特征角度的均值(记作x)和方差(记作y)。
70.在本实施例中,由于被统计量是角度,因此关于均值和方差的计算,采用的是周期性数据均值和方差的计算公式,如下所示:,,其中,为均值,为方差,n为该分段中特征角度的数量,为第个特征角度,为虚数单位,为求复数的幅角的函数,为以自然常数e为底的指数函数。
71.第二步,针对各行程段,检测由均值x和方差y指向的点(即,点(x,y)),与预定区域的位置关系。
72.在一种实施例中,先利用预定义的第一曲线和第二曲线,组成预定区域。再检测点(x,y),与预定区域的位置关系。在本实施例中,点(x,y)与预定区域的位置关系包括:点(x,y)的坐标在预定区域内,或,点(x,y)的坐标不在预定区域内。
73.在本实施例中,定义两个曲线作为第一曲线和第二曲线,其中,第一曲线是椭圆曲线,第二曲线是分段多项式曲线。将它们所围成的区域作为预定区域。
74.如下示出根据本公开的第一曲线和第二曲线的示例:第一曲线:,第二曲线:。
75.如图3示出了根据本公开一个实施例的预定区域的示意图。其中,区域302就是预定区域。在图3中,点a和点b与预定区域302的位置关系分别为:点a在预定区域内,点b不在预定区域内。
76.第三步,基于该位置关系,确定出移动设备在该行程段的状态。
77.根据一种实施例,若所指向的点的坐标在预定区域内,则移动设备在对应行程段为不稳定状态;若所指向的点的坐标不在预定区域内,则移动设备在对应行程段为稳定状
态。
78.继续如图3,根据位置关系,可以确定:移动设备在点a对应的行程段,处于不稳定状态;在点b对应的行程段,处于稳定状态。
79.随后,在步骤s240中,当移动设备处于不稳定状态时,确定对应行程段中移动设备的姿态信息。
80.根据本公开的实施方式,在经步骤s230确定出移动设备在某个行程段中处于不稳定状态后,利用该行程段内的第二传感器数据,来确定对应行程段中移动设备的姿态信息。
81.根据本公开的一些实施例,移动设备的姿态信息包括:移动设备的顶端相对于水平面的倾斜方向。具体来说,移动设备的顶端相对于水平面,可以是向上倾斜或向下倾斜,也可以是水平放置(即,没有倾斜)。在本实施例中,将移动设备的底部所在平面,定义为水平面。
82.在一种实施例中,将移动设备的顶端与水平面的距离,记作b,通过计算b的正负,来确定移动设备的顶端相对于水平面的倾斜方向。换言之,若b>0,则移动设备的顶端相对于水平面向上倾斜;若b<0,则移动设备的顶端相对于水平面向下倾斜。
83.图4示出了根据本公开一些实施例的移动设备的姿态信息的示意图。在图4中,用虚线标示出水平面。如(a)所示,移动设备410被水平放置,此时b为0。如(b)所示,移动设备420向上倾斜,此时b为正数。如(c)所示,移动设备430向下倾斜,此时b为负数。
84.根据一种实施例,还是使用四元数旋转公式,来计算移动设备的顶端与水平面的距离b。
85.首先,基于移动设备水平放置时指向其顶端的射线h,生成第三四元数。射线h对应的向量表示为:,其中,分别表示射线h在x轴、y轴、z轴的分量。将其补全为四元数,即可得到第三四元数。
86.之后,利用行程段内的各第二传感器数据,分别对第三四元数进行旋转,来对应生成各第四四元数。四元旋转公式可参考前文关于步骤s232的相关内容,此处不再赘述。
87.之后,基于各第四四元数,确定移动设备在行程段内的各姿态信息。具体地,取第四四元数的z轴分量,即为b。
88.之后,根据b的取值是否大于0,就能够确定出对应的移动设备的姿态信息。
89.随后在步骤s250中,当移动设备不处于预设姿态时,确认对应行程段中存在异常驾驶行为。
90.根据本公开的实施方式,移动设备在一个行程段中,可能存在不止一个姿态信息,当移动设备在行程段内的各姿态信息均不处于预设状态时,才确认对应行程段中,用户存在异常驾驶行为。
91.考虑到通常人们在使用移动设备时,不太可能会出现移动设备头朝下的情况,即,
移动设备不太会出现向下倾斜的姿态。因此,在本实施例中,预设姿态包括:移动设备的顶端相对于水平面向下倾斜。
92.根据本公开的方案,先利用移动设备的第一传感器数据,判断用户是否处于驾驶状态。当确认处于驾驶状态时,再开始采集第二传感器数据,并通过分析第二传感器数据,来对整个行程进行分段;之后,通过提取行程段中的姿态特征,来判断行程段中是否存在异常驾驶行为。基于本方案,无需引入额外设备(如摄像头),仅使用移动设备的传感器数据,就可以分析并判断用户是否在驾驶车辆的过程中有使用移动设备的分心驾驶行为。而在当前的经济社会中,每个人都会随身携带移动设备(如,智能手机),因此,本方案是一种适应范围广泛、成本低廉的检测方案,具有很强的实用性。
93.相应地,图5示出了根据本公开一些实施的检测异常驾驶行为的装置500的示意图。应当了解,检测异常驾驶行为的装置500与检测异常驾驶行为的方法200互为补充,鉴于此,相同之处不再重复,方法200的相关描述与装置500的相关描述,相互补充说明。
94.如图5所示,检测异常驾驶行为的装置500包括:数据采集单元510、驾驶状态确定单元520、姿态信息确定单元530和异常驾驶行为确定单元540。
95.数据采集单元510采集布置在车辆上的移动设备的第一传感器数据。
96.驾驶状态确定单元520基于所采集的第一传感器数据,判断用户是否处于驾驶状态。
97.在确定处于驾驶状态时,数据采集单元510采集行程中对应的移动设备的多个第二传感器数据。
98.姿态信息确定单元530基于第二传感器数据,判断移动设备是否处于不稳定状态。同时,当确认移动设备处于不稳定状态时,姿态信息确定单元530还会确定对应行程段中,移动设备的姿态信息。
99.异常驾驶行为确定单元540在移动设备不处于预设姿态时,确认对应行程段中存在异常驾驶行为。
100.根据本公开的实施方式,该检测异常驾驶行为的装置500可以布置在移动设备(智能设备)中,以实现对异常驾驶行为的识别。
101.另外,随着第5代通信技术的发展,越来越多的智能设备接入到移动网络中。根据本公开的一种实施场景,接入同一局域网的多个智能设备中,某一些智能设备具备根据本公开实施例所述的检测异常驾驶行为的装置500,某些智能设备不具备检测异常驾驶行为的装置500。这种情况下,智能设备之间的检测异常驾驶行为的装置500可以共享。即,当不具备检测异常驾驶行为的装置500的智能设备要进行诸如异常驾驶行为的检测时,可以发送请求给具备该装置500的智能设备,并将待计算数据等信息发送给后者,请求通过后者的装置500,来完成相应的计算。
102.这样的智能设备还可以在车辆中使用,例如可以实现为车载设备、或者可以嵌入到车辆中,从而为车辆的智能驾驶提供数据处理能力。
103.以上对智能设备的描述仅仅是示意性的,根据本公开的智能设备不受限于此,所有可以利用根据本公开的装置500进行异常驾驶行为检测的智能设备都在本公开的保护范围之内。
104.在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本公开的实施
例可以在没有这些具体细节的情况下被实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
105.类似地,应当理解,为了精简本公开并帮助理解各个公开方面中的一个或多个,在上面对本公开的示例性实施例的描述中,本公开的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该公开的方法解释成反映如下意图:即所要求保护的本公开要求比在每个权利要求中所明确记载的特征更多特征。更确切地说,如下面的权利要求书所反映的那样,公开方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本公开的单独实施例。
106.本领域那些技术人员应当理解在本文所公开的示例中的设备的模块或单元或组件可以布置在如该实施例中所描述的设备中,或者可替换地可以定位在与该示例中的设备不同的一个或多个设备中。前述示例中的模块可以组合为一个模块或者此外可以分成多个子模块。
107.本领域那些技术人员可以理解,可以对实施例中的设备中的模块进行自适应性地改变并且把它们设置在与该实施例不同的一个或多个设备中。可以把实施例中的模块或单元或组件组合成一个模块或单元或组件,以及此外可以把它们分成多个子模块或子单元或子组件。除了这样的特征和/或过程或者单元中的至少一些是相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的的替代特征来代替。
108.此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本公开的范围之内并且形成不同的实施例。例如,在下面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。
109.此外,所述实施例中的一些在此被描述成可以由计算机系统的处理器或者由执行所述功能的其它装置实施的方法或方法元素的组合。因此,具有用于实施所述方法或方法元素的必要指令的处理器形成用于实施该方法或方法元素的装置。此外,装置实施例的在此所述的元素是如下装置的例子:该装置用于实施由为了实施该公开的目的的元素所执行的功能。
110.如在此所使用的那样,除非另行规定,使用序数词“第一”、“第二”、“第三”等等来描述普通对象仅仅表示涉及类似对象的不同实例,并且并不意图暗示这样被描述的对象必须具有时间上、空间上、排序方面或者以任意其它方式的给定顺序。
111.尽管根据有限数量的实施例描述了本公开,但是受益于上面的描述,本技术领域内的技术人员明白,在由此描述的本公开的范围内,可以设想其它实施例。此外,应当注意,本说明书中使用的语言主要是为了可读性和教导的目的而选择的,而不是为了解释或者限定本公开的主题而选择的。因此,在不偏离所附权利要求书的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。对于本公开的范围,对本公开所做的公开是说明性的,而非限制性的,本公开的范围由所附权利要求书限定。