1.本发明属于真空泵控制技术领域,更具体地,涉及一种电动汽车制动真空泵故障诊断及后处理方法及系统。
背景技术:
2.电动真空泵是电动汽车真空液压刹车、助力系统的真空来源。真空泵具有无需润滑油、抽气速度快、能耗小、使用寿命长、安装方便、有效提高汽车制动性能等优点。电动真空泵必须处于持续工作状态来保证真空源能量,这种方法对电动真空泵的耐久可靠性要求高,使用寿命缩短,且浪费电能。虽然一些系统采用真空压力传感器来控制真空泵的开启或停止,但都仅仅是根据真空压力进行简单控制,并没有故障诊断功能和故障降级功能,在很多方面存在安全隐患。比如,当真空罐内的真空度降低到一定水平时,使得真空罐中的压力相当于或接近于大气压力,将导致制动踏板就很难被踩下。因此,需要一种真空泵信号故障诊断和故障降级的方法来解决现有技术中没有诊断功能且在很多方面存在安全隐患的问题。
技术实现要素:
3.针对现有技术的以上缺陷或改进需求,本发明提出了一种电动汽车制动真空泵故障诊断及后处理方法及系统,当故障发生时,能快速报出故障并采取相应降级措施,解决现有整车控制系统所存在的不足。
4.为实现上述目的,按照本发明的一个方面,提供了一种电动汽车制动真空泵故障诊断及后处理方法,包括:
5.由真空度传感器得到的原始电压信号和实际参考电压信号进行真空泵真空度计算得到真空度电压信号和真空度压力信号;
6.由真空度电压信号进行真空度传感器电气故障诊断,并在真空度传感器出现电气故障时,进行相应降级处理;
7.由真空度电压信号进行真空度传感器信号异常故障诊断,并在真空度传感器信号异常时,进行相应降级处理;
8.由真空度压力信号和大气压力传感器得到的大气压力信号进行低真空度故障诊断,并在出现低真空度故障时,进行相应降级处理;
9.由真空度压力信号和制动开关信号进行真空系统泄漏故障诊断,并在真空系统发生泄漏时,进行相应降级处理;
10.由真空度压力信号和制动开关信号进行真空度传感器信号变化梯度过高故障诊断,并在发生真空度传感器信号变化梯度过高故障时,进行相应降级处理;
11.由真空度压力信号和制动开关信号进行真空度传感器信号变化梯度过低故障诊断,并在发生真空度传感器信号变化梯度过低故障时,进行相应降级处理;
12.由真空泵控制信号进行真空泵过热判断,并在真空泵过热时,进行相应降级处理。
13.在一些可选的实施方案中,所述由真空度传感器得到的原始电压信号和实际参考电压信号进行真空泵真空度计算得到真空度电压信号和真空度压力信号,包括:
14.由(原始电压信号
÷
实际参考电压)*标准参考电压对原始电压信号进行修正得到修正后的真空度电压信号;
15.根据真空度传感器特性表,由修正后的真空度电压信号查表得到与修正后的真空度电压信号对应的真空度压力信号。
16.在一些可选的实施方案中,所述由真空度电压信号进行真空度传感器电气故障诊断,并在真空度传感器出现电气故障时,进行相应降级处理,包括:
17.若真空度电压信号≥第一预设电压值或真空度电压信号≤第二预设电压值,且在第一预设时间内满足真空度电压信号≥第一预设电压值或真空度电压信号≤第二预设电压值的累计时间≥第二预设时间,则认为真空度传感器出现电气故障;
18.在出现真空度传感器电气故障时,如果esc从can上过来的真空度信号有效,则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警,且仪表持续显示制动系统故障等级二;如果esc真空度信号无效,电动真空泵工作第三预设时间停第四预设时间,制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级二。
19.在一些可选的实施方案中,所述由真空度电压信号进行真空度传感器信号异常故障诊断,并在真空度传感器信号异常时,进行相应降级处理,包括:
20.若真空度电压信号位于第一预设范围内或真空度电压信号位于第二预设范围内,且在第五预设时间内满足真空度电压信号位于第一预设范围内或真空度电压信号位于第二预设范围内的累计时间≥第六预设时间,则认为真空度传感器信号异常;
21.在出现真空度传感器信号故障时,如果esc从can上过来的真空度信号有效,则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警,且仪表持续显示制动系统故障等级二;如果esc真空度信号无效,电动真空泵工作第七预设时间停第八预设时间,制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级二。
22.在一些可选的实施方案中,所述由真空度压力信号和大气压力传感器得到的大气压力信号进行低真空度故障诊断,并在出现低真空度故障时,进行相应降级处理,包括:
23.若助力器内真空度压力信号低于第一预设比例的大气压力信号,且持续时间大于第九预设时间,则认为出现低真空度故障;
24.在出现低真空度故障时,若电动真空泵工作第十预设时间停第十一预设时间,则制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级三,并存储相关诊断故障代码。
25.在一些可选的实施方案中,所述由真空度压力信号和制动开关信号进行真空系统泄漏故障诊断,并在真空系统发生泄漏时,进行相应降级处理,包括:
26.若刹车未被踩下,且电动真空泵工作持续时间大于第十二预设时间时,助力器内的真空度压力信号小于第二预设比例的大气压力信号,则认为真空系统发生泄漏;
27.在出现真空系统泄漏时,若电动真空泵工作第十三预设时间停第十四预设时间,则制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级一,并存储相关诊断故障代码。
28.在一些可选的实施方案中,所述由真空度压力信号和制动开关信号进行真空度传
感器信号变化梯度过高故障诊断,并在发生真空度传感器信号变化梯度过高故障时,进行相应降级处理,包括:
29.在刹车未被踩下时,若真空度压力信号变化梯度大于第一预设变化梯度,且在第十五预设时间内出现真空度压力信号变化梯度大于第一预设变化梯度的次数在第一预设次数以上,则认为发生真空度传感器信号变化梯度过高故障;
30.在出现真空度传感器信号变化梯度过高故障时,如果esc从can上过来的真空度信号有效,则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警,且仪表持续显示制动系统故障等级二;如果esc真空度信号无效,电动真空泵工作第十六预设时间停第十七预设时间,制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级二。
31.在一些可选的实施方案中,所述由真空度压力信号和制动开关信号进行真空度传感器信号变化梯度过低故障诊断,并在发生真空度传感器信号变化梯度过低故障时,进行相应降级处理,包括:
32.在刹车踩下时,若制动过程中的真空度压力信号变化梯度一直为第二预设变化梯度,且一个点火循环内出现制动过程中的真空度压力信号变化梯度一直为第二预设变化梯度的次数在第二预设次数以上,则认为发生真空度传感器信号变化梯度过低故障;
33.在出现真空度传感器信号变化梯度过低故障时,如果esc从can上过来的真空度信号有效,则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警,且仪表持续显示制动系统故障等级二;如果esc真空度信号无效,电动真空泵工作第十八预设时间停第十九预设时间,制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级二。
34.在一些可选的实施方案中,所述由真空泵控制信号进行真空泵过热判断,并在真空泵过热时,进行相应降级处理,包括:
35.当真空泵连续工作超过第二十预设时间,则认为真空泵过热;
36.在真空泵过热时,电动真空泵工作第二十一预设时间停第二十二预设时间,制动系统故障灯点亮,发出报警,仪表显示制动系统故障等级三。
37.按照本发明的另一个方面,提供了一种电动汽车制动真空泵故障诊断及后处理系统,包括:
38.真空泵真空度计算模块,用于由真空度传感器得到的原始电压信号和实际参考电压信号进行真空泵真空度计算得到真空度电压信号和真空度压力信号;
39.真空度传感器电气故障诊断模块,用于由真空度电压信号进行真空度传感器电气故障诊断,并在真空度传感器出现电气故障时,进行相应降级处理;
40.真空度传感器信号异常故障诊断模块,用于由真空度电压信号进行真空度传感器信号异常故障诊断,并在真空度传感器信号异常时,进行相应降级处理;
41.低真空度故障诊断模块,用于由真空度压力信号和大气压力传感器得到的大气压力信号进行低真空度故障诊断,并在出现低真空度故障时,进行相应降级处理;
42.真空系统泄漏故障诊断模块,用于由真空度压力信号和制动开关信号进行真空系统泄漏故障诊断,并在真空系统发生泄漏时,进行相应降级处理;
43.真空度传感器信号变化梯度过高故障诊断,用于由真空度压力信号和制动开关信
号进行真空度传感器信号变化梯度过高故障诊断,并在发生真空度传感器信号变化梯度过高故障时,进行相应降级处理;
44.真空度传感器信号变化梯度过低故障诊断模块,用于由真空度压力信号和制动开关信号进行真空度传感器信号变化梯度过低故障诊断,并在发生真空度传感器信号变化梯度过低故障时,进行相应降级处理;
45.真空泵过热保护模块,用于由真空泵控制信号进行真空泵过热判断,并在真空泵过热时,进行相应降级处理。
46.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
47.本发明的一种电动汽车真空泵信号故障诊断及后处理方法,包括真空泵真空度计算、真空度传感器电气故障诊断、真空泵继电器电气故障诊断、低真空度故障诊断、真空系统泄漏故障诊断、真空度传感器信号异常故障诊断、真空度传感器信号变化梯度过高故障诊断、真空度传感器信号变化梯度过低故障诊断、真空泵过热保护,以及上述故障诊断的后处理方法。在故障发生时,能快速报出故障并采取相应降级措施,解决现有整车控制系统所存在的不足。
附图说明
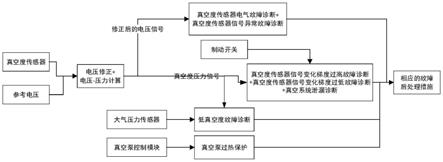
48.图1是本发明实施例提供的一种电动汽车制动真空泵故障诊断及后处理方法的流程示意图;
49.图2是本发明实施例提供的一种真空度计算示意图;
50.图3是本发明实施例提供的一种真空度传感器电气故障诊断及降级流程图;
51.图4是本发明实施例提供的一种真空度传感器信号异常诊断及降级流程图;
52.图5是本发明实施例提供的一种低真空度诊断及降级流程图;
53.图6是本发明实施例提供的一种真空系统泄露诊断及降级流程图;
54.图7是本发明实施例提供的一种真空度传感器信号变化梯度过高故障诊断及降级流程图;
55.图8是本发明实施例提供的一种真空度传感器信号变化梯度过低故障诊断及降级流程图;
56.图9是本发明实施例提供的一种真空泵过热判断及降级流程图。
具体实施方式
57.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
58.在本发明实例中,“第一”、“第二”等是用于区别不同的对象,而不是用于描述特定的顺序或先后次序。
59.如图1所示,一种电动汽车真空泵信号故障诊断及后处理方法,包括真空泵真空度计算、真空度传感器电气故障诊断、真空度传感器信号异常故障诊断、低真空度故障诊断、
真空系统泄漏故障诊断、真空度传感器信号变化梯度过高故障诊断、真空度传感器信号变化梯度过低故障诊断、真空泵过热保护,以及上述故障诊断的后处理措施。其中,真空度计算主要输入信号来自真空度传感器信号和参考电压,真空度传感器电气故障诊断和真空度传感器信号异常故障诊断主要输入信号来自真空度计算得到的真空度电压信号,低真空度故障诊断主要输入信号来自真空度计算得到的真空度压力信号和大气压力传感器信号,真空系统泄漏故障诊断、真空度传感器信号变化梯度过高故障诊断和真空度传感器信号变化梯度过低故障诊断主要输入信号来自真空度计算得到的真空度压力信号和制动开关信号,真空泵过热判断主要信号来自真空泵控制信号。
60.进一步地,真空度计算包括参考电压对原始真空度电压信号的修正和电压-压力换算两部分,如图2所示。
61.更进一步地,参考电压对原始真空度电压信号的修正指的是(原始电压信号
÷
实际参考电压)*标准参考电压(如5v),以消除参考电压波动对原始真空度电压信号的影响。
62.更进一步地,电压-压力换算将根据传感器特性查表实现。
63.进一步地,真空度传感器电气故障诊断主要判断真空度传感器是否对地短路、对电源短路或开路,当真空度传感器电压信号≥第一预设电压值(如4.8v,可标定)或真空度传感器电压信号≤第二预设电压值(如0.2v,可标定)且第一预设时间(如3s,可标定)内累计时间≥第二预设时间(如1.5s,可标定),认为真空度传感器出现电气故障,并进行相应降级,如图3所示。
64.更进一步地,出现真空度传感器电气故障的降级措施是,如果esc从can上过来的真空度信号有效(esc发过来两个信号,真空度传感器信号和真空度有效性信号),则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警声音,且仪表持续显示“制动系统故障等级二”;如果esc真空度信号无效,电动真空泵工作第三预设时间(如10s,可标定)停第四预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪表显示“制动系统故障等级二”。
65.进一步地,真空度传感器信号异常故障诊断主要判断真空度传感器信号是否超出合理范围,当真空度传感器电压信号位于第一预设范围内(如小于4.5v,可标定)或第二预设范围内(如小于0.2v,可标定),且第五预设时间(如5s,可标定)内累计出现时间≥第六预设时间(如3s,可标定),认为真空度传感器信号异常,并进行相应降级,如图4所示。
66.更进一步地,出现真空度传感器信号故障的降级措施是,如果esc从can上过来的真空度信号有效(esc发过来两个信号,真空度传感器信号和真空度有效性信号),则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警声音,且仪表持续显示“制动系统故障等级二”;如果esc真空度信号无效,电动真空泵工作第七预设时间(如10s,可标定)停第八预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪表显示“制动系统故障等级二”。
67.进一步地,低真空度故障诊断主要判断助力器内真空度是否过低,当助力器内真空度压力信号低于第一预设比例(如20%,可标定)的大气压,且持续时间大于第九预设时间(如15s,可标定),认为出现低真空度故障,并进行相应降级,如图5所示。
68.更进一步地,出现低真空度故障的降级措施是,电动真空泵工作第十预设时间(如10s,可标定)停第十一预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪
表显示“制动系统故障等级三”,存储相关诊断故障代码(diagnostic trouble code,dtc)。
69.进一步地,真空系统泄漏故障诊断主要判断助力器是否出现泄漏,当刹车未被踩下,且电动真空泵工作持续时间大于第十二预设时间(如22.5s,可标定)时,真空度传感器监测到助力器内的真空度压力信号小于第二预设比例(如45%,可标定)的大气压,认为真空系统发生泄漏,并进行相应降级,如图6所示。
70.更进一步地,出现真空系统泄漏故障的降级措施是,电动真空泵工作第十三预设时间(如10s,可标定)停第十四预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪表显示“制动系统故障等级一”,存储相关dtc。
71.进一步地,真空度传感器信号变化梯度过高故障诊断指的是,刹车未被踩下时,当真空度压力信号变化梯度大于第一预设变化梯度(如60mbar/30ms,可标定),且第十五预设时间(如500ms,可标定)内出现第一预设次数(如3次,可标定)以上,认为发生真空度传感器信号变化梯度过高故障,并进行相应降级,如图7所示。
72.更进一步地,出现真空度传感器信号变化梯度过高故障的降级措施是,如果esc从can上过来的真空度信号有效(esc发过来两个信号,真空度传感器信号和真空度有效性信号),则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警声音,且仪表持续显示“制动系统故障等级二”;如果esc真空度信号无效,电动真空泵工作第十六预设时间(如10s,可标定)停第十七预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪表显示“制动系统故障等级二”。
73.进一步地,真空度传感器信号变化梯度过低故障诊断指的是,刹车踩下时,当制动过程中的真空度压力信号变化梯度一直为第二预设变化梯度(如0,可标定),且一个点火循环内出现第二预设次数(如3次,可标定)以上,认为发生真空度传感器信号变化梯度过低故障,并进行相应降级,如图8所示。
74.更进一步地,出现真空度传感器信号变化梯度过低故障的降级措施是,如果esc从can上过来的真空度信号有效(esc发过来两个信号,真空度传感器信号和真空度有效性信号),则按照esc提供的真空度信号正常控制真空泵启停,制动系统故障灯点亮,发出报警声音,且仪表持续显示“制动系统故障等级二”;如果esc真空度信号无效,电动真空泵工作第十八预设时间(如10s,可标定)停第十九预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪表显示“制动系统故障等级二”。
75.进一步地,真空泵过热保护指的是,当真空泵连续工作超第二十预设时间(如300s),认为真空泵过热,并进行相应降级,如图9所示。
76.更进一步地,真空泵过热的保护措施是,电动真空泵工作第二十一预设时间(如10s,可标定)停第二十二预设时间(如10s,可标定),制动系统故障灯点亮,发出报警声音,仪表显示“制动系统故障等级三”。
77.在本发明另一实施例中,还提供了一种电动汽车真空泵信号故障诊断及后处理系统,包括:
78.真空泵真空度计算模块,用于由真空度传感器得到的原始电压信号和实际参考电压信号进行真空泵真空度计算得到真空度电压信号和真空度压力信号;
79.真空度传感器电气故障诊断模块,用于由真空度电压信号进行真空度传感器电气故障诊断,并在真空度传感器出现电气故障时,进行相应降级处理;
80.真空度传感器信号异常故障诊断模块,用于由真空度电压信号进行真空度传感器信号异常故障诊断,并在真空度传感器信号异常时,进行相应降级处理;
81.低真空度故障诊断模块,用于由真空度压力信号和大气压力传感器得到的大气压力信号进行低真空度故障诊断,并在出现低真空度故障时,进行相应降级处理;
82.真空系统泄漏故障诊断模块,用于由真空度压力信号和制动开关信号进行真空系统泄漏故障诊断,并在真空系统发生泄漏时,进行相应降级处理;
83.真空度传感器信号变化梯度过高故障诊断,用于由真空度压力信号和制动开关信号进行真空度传感器信号变化梯度过高故障诊断,并在发生真空度传感器信号变化梯度过高故障时,进行相应降级处理;
84.真空度传感器信号变化梯度过低故障诊断模块,用于由真空度压力信号和制动开关信号进行真空度传感器信号变化梯度过低故障诊断,并在发生真空度传感器信号变化梯度过低故障时,进行相应降级处理;
85.真空泵过热保护模块,用于由真空泵控制信号进行真空泵过热判断,并在真空泵过热时,进行相应降级处理。
86.其中,各模块的具体实施方式可以参考上述方法实施例的描述,此处不再赘述。
87.需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
88.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。