1.本发明涉及一种用于运行车辆的辅助系统的方法以及一种车辆的辅助系统。
背景技术:
2.已知车辆的产生周围环境地图、所谓的“占用栅格地图(occupancy grid map)”的辅助系统。在这样一种周围环境地图中,能够映射车辆的周围环境中的对象。通常,借助于由车辆的环境传感装置感测的环境数据来产生周围环境地图。在此,尤其由于具有误差的环境数据和运动信息,能够导致周围环境地图中的图示与现实的偏差。
技术实现要素:
3.与此相对,本发明的方法的任务在于,能够提供具有特别精确且可靠的信息的周围环境地图。这通过一种用于运行车辆的辅助系统的方法来实现,所述方法包括下述步骤:
[0004]-感测、尤其是借助于车辆的环境传感装置来感测该车辆的周围环境;
[0005]-产生周围环境地图,尤其所述周围环境地图具有周围环境的成像,并且将该周围环境地图划分为多个单元格,其中,基于对象在周围环境的相应于单元格的地点处的存在,给每个单元格分配一个预限定值,和
[0006]-基于下述参数中的一个或者多个参数使单元格中性化(neutralisieren):
[0007]-自单元格的分配起的已经过时间,
[0008]-单元格与车辆的瞬时地点之间的距离,和
[0009]-自单元格的分配起所走过的轨迹的轨迹弯曲。
[0010]
换言之,在该方法中,基于所感测的周围环境产生尤其也可以被称为“占用栅格地图(occupancy grid map)”的周围环境地图。将该周围环境地图划分为多个单元格,分别给这些单元格分配预确定的值。在此,基于在与确定的单元格地点相应的车辆周围环境中地点处是否存在对象,给这些单元格分配值。因此,能够通过简单的方式根据周围环境地图求取:周围环境的哪些区域能自由通行而哪些区域不能自由通行。尤其,由此也能够对车辆进行定位,优选相对于对象进行定位。例如,能够将数值作为值分配给单元格,这些数值优选要么标记是否存在对象,要么标记是否不存在对象。
[0011]
在此,基于一个或者多个特定参数,使单元格中性化。在此,将“使单元格的值复位到标准值、尤其在分配之前就存在的标准值”视为中性化。尤其将“使单元格这样复位,使得其代表状态“无对象
””
视为中性化。替代地,也可以通过中性化将单元格设定为状态“已占用”,即能够这样设定,使得该单元格标记对象。作为对于单元格的中性化的判据,可以将自给该单元格分配预确定的值起已过去的已经过时间用作参数。因此,已经过时间相当于相应单元格未改变或者未被观察的持续时长。在已经过时间长的情况下,例如由于与该单元格相关的信息的过时(alterung)可能引起偏差。优选,通过有规律地、周期性地使所有单元格中性化能够实现,在周围环境地图中始终存在相对较实时的数据。由此,能够通过特别简单的方式实现对周围环境地图的精确性的优化。
[0012]
替代于或附加于已经过时间,能够将单元格与车辆的瞬时地点之间的距离用作对单元格的中性化的判据。优选,在此,所观察的单元格与车辆的瞬时位置之间的最小间距被视为距离。替代地,作为距离,能够求取和使用自单元格的分配起所走过的轨迹的长度,以便例如使在较长行驶路程之前所记录的单元格值中性化。
[0013]
另外,替代地或者附加地,能够分析自单元格的分配起车辆已走过的轨迹的轨迹弯曲并且可以基于该轨迹弯曲使单元格中性化。优选,基于:如果单元格位于周围环境地图的存在强烈的轨迹弯曲、例如呈较小的轨迹拐弯半径形式的轨迹弯曲的区域中,使这些单元格中性化。例如,在此,可以使强烈弯曲的轨迹所延伸穿过的单元格和/或与这种单元格相邻的单元格中性化。在沿着确定轨迹的行驶中,在具有强烈的轨迹弯曲的区域中、例如在拐弯行驶中可能引起尤其在车辆的测距法中的特别高的偏差。因此,通过在单元格的中性化时进行相应的考虑能够排除周围环境地图的特别容易有误差的区域。
[0014]
因此,所述方法提供如下优点:能够删除周围环境地图的过时的和/或与车辆相距远的和/或特别容易有误差的区域。因此,尤其保留了地图的如下区域:在记录这些区域时所述区域以较高概率具有小误差。因此,能够提供具有特别高精度的周围环境地图,以便例如允许在周围环境地图中对车辆的尽可能高的定位精确性。
[0015]
优选实施方式的内容是本发明的优选扩展方案。
[0016]
优选地,对每个单元格求取中性化指数,其中,当对应的中性化指数达到或者超过预限定值时,使该单元格中性化。在此,基于已经过时间和/或距离和/或轨迹弯曲来求取中性化指数。优选,在此,中性化指数随已经过时间的提高而提高。在考察距离时,优选,中性化指数在距离增大时提高。替代地或者附加地,中性化指数在轨迹弯曲较强烈的情况下和/或轨迹弯曲持续较长时间的情况下提高。因此,特别优选,在所述方法中借助于确定的算法来求取中性化指数,该中性化指数能够提供关于“单元格的可能的误差判据”的结论。如果例如中性化指数一直递增,直到达到或者超过预限定值,则使相应的单元格中性化。由此,能够通过特别简单且精确的方式对周围环境地图进行以优化的方式适配于多个不同的误差源的优化。
[0017]
特别优选,基于这些参数中的每个参数,也就是说不仅基于已经过时间而且基于距离并且基于轨迹弯曲来确定中性化指数。在此,这些参数被不同地加权。这意味着,根据三个不同的参数来求取一个共同的中性化指数,其中优选,这样构造用于求取的算法,使得这些参数以不同的强度加权。这意味着,第一参数的变化比其他参数更强烈或者更弱地影响中性化指数。由此,能够特别精确地且通过简单的方式来中性化、即排除具有高误差概率的区域。
[0018]
优选地,轨迹弯曲被最强烈地加权。这意味着,与其他参数的份额相比,根据轨迹弯曲确定的、纳入到中性化指数中的份额被特别强烈地加权。因此,与针对其他区域中的单元格相比,尤其针对在具有强烈的轨迹弯曲的区域中的单元格,即针对例如在车辆以小拐弯半径驶过拐弯处的周围环境地图区域中的单元格,中性化指数提高得更强烈。由此,能够优先地排除处于高轨迹弯曲的区域中的单元格,以便能够提供具有特别精确且可靠的数据的周围环境地图。
[0019]
优选地,参数“自单元格的分配起的已经过时间”被最弱地加权。这意味着,与其他参数相比,已经过时间对中性化指数做出的贡献最小。尤其,由此优先考虑与车辆的测距法
有关的参数即距离和轨迹弯曲,由此,能够较早地排除这些特别容易有误差的份额。
[0020]
优选,使如下的每个单元格中性化:对于所述单元格,自这些单元格的分配起的已经过时间为至少60秒、优选至少30秒、尤其至少10秒。这意味着,在达到最大年龄时删除该单元格。因此,能够通过特别简单的方式实现,有规律地更新过时的单元格。
[0021]
进一步优选地,使如下的每个单元格中性化:在所述单元格的情况下,该单元格与车辆的瞬时地点之间的距离为至少50m、优选至少20m、尤其至少7m。因此,对与车辆相距至少一个预定义距离的所有单元格进行中性化,使得仅使用周围环境地图的、靠近车辆地点的单元格。由此,优先考虑周围环境地图的靠近车辆的区域,这些区域能够以相对较高的精确性来确定。
[0022]
优选地,求取自单元格的分配起借助车辆所走过的轨迹的最小间距或者长度作为该单元格与车辆的瞬时地点之间的距离。这意味着,要么求取单元格与车辆之间的最小间距、例如直线距离(luftlinie),由此能够实现特别简单的确定。替代地,作为距离,能够求取所走过的轨迹的长度、即车辆在单元格与瞬时地点之间已走过的路程,以便在对单元格的中性化时也考虑例如具有多个拐弯处的行驶、例如频繁的方向变换。
[0023]
优选地,使如下的所有单元格中性化:沿着借助车辆所走过的轨迹,所述单元格位于轨迹区域以内:在该轨迹区域内,轨迹弯曲具有最大50m、优选最大30m、优选最大15m的拐弯半径。替代地或者附加地,可以使如下的所有单元格中性化:沿着借助车辆所走过的轨迹所述单元格位于该轨迹区域的前面。在此,包括该轨迹在内的区域被视为轨迹区域。优选,轨迹区域包括轨迹延伸穿过的那些单元格以及分别相邻的单元格。优选,轨迹区域相当于紧邻该轨迹至多2m的区域。换言之,使如下的所有单元格中性化:所述单元格位于所走过的轨迹的非常强烈地弯曲的区域处和/或前面。由此,能够通过简单的方式并且可靠地排除这些区域、尤其在借助于车辆的测距法进行感测时可能出现特别高的误差的区域,以便得到特别精确且可靠的周围环境地图。
[0024]
优选地,可以将所述参数的在前面几段中所说明的极限值视为在任何时候都有效的绝对极限,其中,在达到或者超过这些极限值时对相应单元格进行中性化。此外应注意,在使用这些绝对极限时,如果还未达到或者超过这些极限中的任何一个极限,也可能达到对单元格的中性化的判据。这意味着,当还未达到已经过时间的和/或距离的和/或轨迹弯曲的所说明的绝对极限中的任何一个极限时,中性化指数也可能达到或者超过预限定值,在该预限定值的情况下使该单元格中性化。尤其,为此能够这样设计用于确定中性化指数的相应算法,使得能够基于所有三个参数同时求取对应单元格的值有误差的概率。如果这个概率高于预确定值,则能够使相应的单元格中性化。
[0025]
特别优选,在不同的时间点产生多个周围环境地图。在此,该方法还包括下述步骤:将至少两个周围环境地图相互比较。所述比较也能够被称为“匹配(matching)”。优选地,在使两个周围环境地图中的一些单元格中性化了之后,将至少两个周围环境地图相比较。通过单元格的中性化
‑‑
由此尤其删除具有高误差概率的区域
‑‑
留下具有高精确性的周围环境地图。由此,所述比较能够以特别简单的方式、可靠且以高精度地实施,例如借助仍存在于周围环境地图中的所感测的对象。
[0026]
优选地,所述方法还包括下述步骤:基于至少两个周围环境地图的比较在这些周围环境地图中的至少一个周围环境地图中定位车辆。优选地,为此进行第一周围环境地图
的第一次感测作为所谓的“训练”,例如借助于由驾驶员手动控制的车辆行驶来进行。在此,将在周围环境地图内确定车辆的位置和定向视为定位。例如,借助于车辆的测距法和环境传感装置将对象绘入到第一周围环境地图中。稍后,通过在周围环境的同一区域中的第二次行驶可以借助于第二次感测产生第二周围环境地图并且将其与第一周围环境地图相比较。因此,基于该比较能够估计车辆的尤其是相对于绘入在周围环境地图中的对象或者类似物的位置。在此,优选地,基于所描述的参数中的一个或者多个参数对单元格进行的中性化能够利用第一周围环境地图和/或利用第二周围环境地图来实施。由于由此使具有高误差概率的那些单元格中性化,因此能够实现车辆的特别精确且可靠的定位。
[0027]
优选地,所述方法还包括下述步骤:优先考虑布置得与车辆的瞬时地点相距小距离的单元格。尤其,优先考虑布置得与车辆的瞬时地点相距最大10m、优选最大3m的单元格。在此,例如将在分析评价周围环境地图时对被优先考虑的单元格的优先处理可以视为优先考虑。特别优选,能够给周围环境地图的所有单元格分配权重因数,该权重因数例如与单元格的值相乘。在此,优先考虑可以包括权重因数的提高,使得例如在定位车辆时靠近车辆的单元格的值更重要,由此能够实现更高的周围环境地图精确性。
[0028]
特别优选,所述方法还包括下述步骤:优先考虑反映周围环境中的静态对象的单元格。在此,不能运动的障碍物被视为静态对象,例如建筑物或者墙壁或者类似物。例如,能够借助于对借助于环境传感装置所感测的车辆周围环境的分类来识别:感测到的对象是静态对象。例如,借助于该分类能够识别:感测到的对象是车辆还是行人、是建筑物还是墙壁以及例如是否能够运动,或者这些感测到的对象是否总是停留在同一地点。通过对静态对象的这种优先考虑同样能够提高周围环境地图的精确性。
[0029]
另外,本发明提出一种车辆的辅助系统。该辅助系统包括设置为用于感测车辆周围环境的环境传感装置和设置为用于实施所说明的方法的控制设备。尤其,环境传感装置在此还设置为用于感测车辆的测距法数据。在此,能够以特别低且成本有利的硬件耗费来提供该辅助系统,以便能够以对于驾驶员而言的高舒适性和高精确性来运行车辆。
[0030]
优选地,环境传感装置具有雷达传感器和/或激光雷达传感器和/或超声波系统和/或摄像机用以感测周围环境。优选,在此基于借助于环境传感装置所感测的环境数据来产生周围环境地图以及优选地还在该周围环境地图中定位车辆。
附图说明
[0031]
下面,根据实施例结合附图描述本发明。在附图中,功能相同的构件分别用相同的附图标记来标明。在此示出:
[0032]
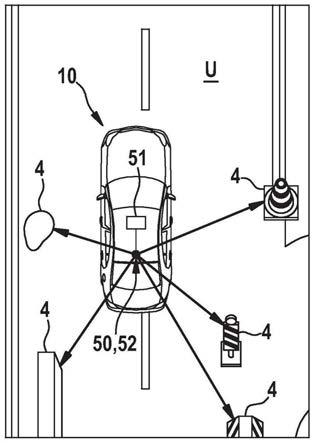
图1根据本发明的一个优选实施例的、对具有辅助系统的车辆的运行的示意性简化图,和
[0033]
图2示出图1的对车辆的运行的另外的示意图。
具体实施方式
[0034]
图1和2示出具有辅助系统50的车辆10的简化示意图。在此,示出用于车辆10的辅助系统50的运行的方法的多个不同的简化视图。
[0035]
辅助系统50包括环境传感装置52,该环境传感装置设置为用于感测车辆10的周围
环境u。环境传感装置52包括雷达传感器、激光雷达传感器、超声波系统和摄像机。借助于环境传感装置52能够感测车辆10的周围环境u中的对象4,如例如图1(a)中所示出的那样。
[0036]
另外,辅助系统50包括控制设备51,该控制设备设置为用于基于所感测的周围环境u产生周围环境地图2,该周围环境地图是周围环境u的影像,如图1(b)中所示出的那样。
[0037]
周围环境地图2划分为多个单元格3。在此,周围环境地图2是二维的并且构造在车道表面的这样的平面中:在该平面上车辆10可以在周围环境u中前进。这些单元格3是正方形的并且具有1m的边长。周围环境地图2同样是正方形的并且在长度和宽度上分别具有十个并列的单元格3,即该周围环境地图反映了具有10m边长的区域。
[0038]
应注意,取代二维的周围环境地图2,也可以替代地使用三维的周围环境地图2。在这种情况下,单元格3优选是长方体形的,特别优选是立方体形的。
[0039]
基于感测到的对象4,给周围环境地图2的如下每个单元格3分配预定义的值:所述单元格位于与周围环境u的具有对象4的地点相应的周围环境地图地点处。例如,给在周围环境地图2中代表如下地点的相应单元格3a分配代表状态“已占用”的值:在该地点处在周围环境u中有对象4(参见图1(b))。
[0040]
借助于周围环境地图2能够实施对周围环境中的车辆10的定位。为此,产生第二周围环境地图2b并且将其与至少一个另外的第一周围环境地图2a比较。这在图2中简化地示出。
[0041]
在此,首先,在第一次训练行驶中例如通过驾驶员手动控制地利用车辆10驶过周围环境u的一个区域。在该训练行驶期间产生第一周围环境地图2a。这在图2(a)中示出。
[0042]
当车辆10例如在后来的时间点重新位于周围环境u的同一区域中时,能够在第二步骤中产生第二周围环境地图2b,如图2(b)中所示出的那样。在此,在这两个周围环境地图2a、2b中的每个周围环境地图中相应地标记单元格3,以便示出周围环境u中的对象4或者空闲区域。
[0043]
接下来,在第三步骤中,将这两个周围环境地图2a、2b相互比较。这在图2(c)中示意性地示出。在此,根据代表对象4的那些单元格3能够将这两个周围环境地图2a、2b上下叠置,并且由此在第二次行驶中对车辆10在周围环境u中进行定位。
[0044]
在感测周围环境u和产生这些周围环境地图2a、2b时,由于误差、尤其车辆10的测距法中的误差在占用周围环境地图2a、2b时和/或在接下来进行定位时可能发生偏差。
[0045]
尤其,如果在产生第一周围环境地图2a和第二周围环境地图2b时存在使其相对彼此有偏差的误差,则这可能产生定位时特别高的不精确性的后果。为了避免或者减少这种误差,实施下文所说明的方法用以对周围环境地图2a、2b进行优化。
[0046]
为了对周围环境地图2a、2b进行优化,使周围环境地图2a、2b的特定单元格3中性化,也就是说复位到在占用带有特定值的该单元格3之前所存在的值。该值尤其说明,相应的单元格3未被占用,即不存在对象4。
[0047]
在此,基于多个参数进行单元格3的中性化,根据这多个参数对每个单元格3求取中性化指数。在此,具体基于下述参数来求取该中性化指数:
[0048]-自单元格3的分配起的已经过时间,
[0049]-单元格3与车辆10的瞬时地点之间的距离5,和
[0050]-自单元格3的分配起由车辆10所走过的轨迹6的轨迹弯曲60,
[0051]
因此,已经过时间说明单元格3的值的年龄。已经过时间越多,即单元格3的值越老,则中性化指数被提高得就越多。尤其,在超过给单元格3分配的值的预定义年龄(例如至少60秒)时,无论如何都使单元格3中性化。由此,以简单的方式确保,只考虑周围环境地图2a、2b中的实时值。
[0052]
在此,单元格3与车辆10的瞬时地点之间的距离5一方面能够被视为车辆、尤其是车辆10的环境传感装置52与对象4之间的直接间距、即最短路程,如例如在图1中借助于箭头所示出的那样。替代地,距离5能够被视为自单元格3的分配起已走过的轨迹6的长度。因此,在这种情况下,在求取距离5时也考虑车辆10的拐弯行驶。在此,与单元格3的值的年龄越来越大相似地,对于与车辆10的距离增大的单元格3,提高中性化指数。
[0053]
尤其,使如下的每个单元格中性化:对于该单元格,单元格与车辆的瞬时地点之间的距离5大于或等于预定义的距离5(例如至少20m)。由此,也以简单的方式确保,使与车辆10相距远的单元格3中性化,以便降低周围环境地图2a、2b中的误差。尤其,在车辆10的测距法中有误差的情况下,这些误差在距离较大的情况下对周围环境地图2a、2b中的偏差产生特别强烈的影响。
[0054]
另外,求取借助车辆10在由周围环境地图2a、2b反映的区域内走过的轨迹6的弯曲、尤其是拐弯半径(参见图2(a))作为轨迹弯曲60。在此,轨迹6延伸穿过并且在其中存在轨迹6的弯曲的单元格3也得到中性化指数的提高。除了轨迹6直接延伸穿过的单元格3之外,这种情况附加地适用于在轨迹区域61内的分别相邻的、直接邻接的单元格3。对于轨迹弯曲60特别强烈的情况,尤其当拐弯半径为30m或者更少时,直接使相应的单元格3中性化。由于在轨迹弯曲60强烈的区域中可能在测距法中存在特别大的误差,因此通过使相应的单元格3中性化能够特别有效地提高周围环境地图2a、2b的精确性。
[0055]
另外,不仅使直接处于轨迹弯曲60的区域中的单元格中性化或提高其中性化指数,而且也使位于弯曲的轨迹6的轨迹区域61的前面的所有单元格和对应相邻的单元格,即在车辆10驶过轨迹区域61之前就沿着轨迹6的那些单元格中性化或提高其中性化指数。
[0056]
换言之,优选借助于相应的算法,根据所提到的参数,即已经过时间、距离5和轨迹弯曲60,针对每个单元格3单独地计算对中性化指数的贡献,并且当这个中性化指数达到或者超过预限定值时,使该单元格3中性化。
[0057]
例如,借助于该方法使在图2(a)中示出的周围环境地图2a的下边缘处的单元格3b中性化,因为这些单元格沿着轨迹6位于具有强烈的轨迹弯曲60的轨迹区域61的前面、与车辆10的瞬时地点远离,并且还自较长时间起未被观察到,即自该值的分配起存在长的已经过时间。
[0058]
例如,不同的参数对中性化指数的贡献能够被相同地加权。然而,特别有利的是,这些贡献被不同地加权。在此,特别有利的是,轨迹弯曲60被最强烈地加权,而已经过时间被最弱地加权。由此,能够就周围环境地图2a、2b中的小误差而言特别好地优化单元格3的性能。
[0059]
在此,特定单元格3的中性化提供下述优点:能够删除周围环境地图2a、2b的特别容易有误差的区域。因此,尤其保留周围环境地图2a、2b的以更高概率具有小误差的区域。因此,能够提供具有特别高精度的周围环境地图2a、2b,以便借助于这些周围环境地图2a、2b能够实现车辆10的尽可能高的定位精确性。