1.本发明涉及农业机械领域,尤其涉及一种适合在高杆作物田间行走耕作的一种田间高杆作物耕作车的自动铅垂伸缩支臂自走轮。
背景技术:
2.目前,玉米、高粱等高杆作物的田间所使用的耕作车有自走式喷杆喷雾机车、玉米剪稍机车、大型四轮打药施肥车,能在高杆作物田地里的苗期、成熟期作业,但只能在平整的高杆作物田里作业,对于丘陵地区和山区的坡地里,耕作车倾斜,支臂自走轮垂直于坡面没有铅垂,而作物生长无论是水平平整田地还是坡地都是铅垂竖立的,造成作物和支臂自走轮角度不一致、相互间不平行,特别是支臂及自走轮刮高杆作物,出现刮伤断、刮倒作物而损失。
技术实现要素:
3.为了解决上述技术问题,本发明提出一种田间高杆作物耕作车的自动铅垂伸缩支臂自走轮,自动调节支臂及自走轮时刻与高杆作物平行不刮苗。
4.为了实现上述目的,本发明的技术方案如下:
5.一种田间高杆作物耕作车的自动铅垂伸缩支臂自走轮,包括支臂、自走轮、设置在耕作车上的电源、单片机、倾角传感器、液压油泵、液压电磁阀、液压油缸;
6.其中,所述的耕作车底盘大架的筒形支臂内连接双向液压油缸,油缸的活塞下端连接伸缩支臂,伸缩支臂为中空结构下端连接地脚自走轮,双向液压油缸活塞为中空式,中空孔内穿过上传动轴,上传动轴的下端为方形结构伸入到外圆内方的圆形传动套筒内,且传动套筒内上端为与传动轴下端同样的方孔,传动轴可以在方孔内上下滑动,传动套筒的下端固定同轴向的下传动轴且传动套筒与下传动轴固定于一体且与上传动轴同步旋转,传动套筒上下两端各有轴承连接定位在伸缩支臂的内壁,所述的电源模块连接单片机,倾角传感器连接a/d转换器、连接单片机,将倾斜角度模拟信号经a/d转换为数字量给单片机,单片机连接各驱动电源、各驱动电源连接控制各相连接的液压电磁阀ya的开启、关闭来控制液压油缸,倾角传感器固定在驾驶室的前方单片机控制模块区域,所述的单片机分内部带有a/d转换和外接a/d转换,单片机连接手动/自动转换模式开关、连接触摸显示屏,所述的液压油泵,驱动电源连接液压油泵电机、液压油泵连接发动机动力,油电混动力可切换,所述的伸缩支臂支撑耕作车,且在控制液压油缸的作用自动调节地脚自走车轮保持铅垂状态、调节耕作车保持水平状态。
7.进一步地,所述的伸缩支臂设置在筒形支臂内下端,支臂与耕作车体底盘大架垂直连接固定。
8.进一步地,所述的伸缩支臂的筒体与支臂之间设置有转向轴承连接支撑,筒体连同伸缩支臂可以绕铅垂轴线旋转使得耕作车转向。
9.进一步地,所述的筒体壁沿着竖轴方向开有长孔滑道,伸缩支臂上端设置有滑轨
销在长孔内往复上下滑动制约伸缩支臂与筒体保持同一转角,长孔长度为伸缩支臂的伸缩长度。
10.进一步地,所述的液压油缸为两个雷同的双向液压油缸代替中空液压油缸,两个液压油缸的活塞都与伸缩支臂的上端连接,且两个雷同的双向液压油缸共用连通同一个液压电磁阀ya。
11.综上所述,本发明的有益效果是:本发明的一种田间高杆作物耕作车的自动铅垂伸缩支臂自走轮,通过倾角传感器连接单片机控制液压油缸拖动伸缩支臂产生伸缩来实现对耕作车自动调节水平,避免燃料油和药液倾撒、控制调节支臂及自走轮自动铅垂不刮苗,不损伤作物。
附图说明
12.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不构成对本发明的不当限定,在附图中:
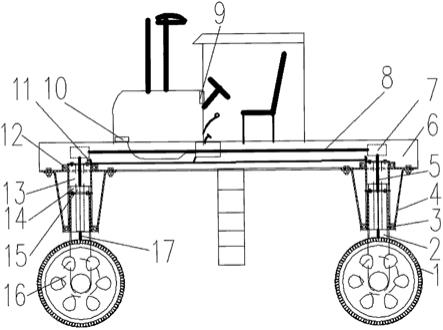
13.图1是本发明的实施例结构示意图;
14.图2是图1的左视图;
15.图3是本发明实施例的伸缩支臂自走轮详细结构示意图;
16.图4是图3的局部放大结构示意图;
17.图5是本发明的另一实施例的结构示意图;
18.图6是本发明的实施例的自动控制线路组成示意图;
19.图7是图6的单片机控制线路详细示意图;
20.图8是图7的液压控制线路详细示意图;
21.图9、图10是本发明的田间对比示意图;
22.图11、图12是本发明的另一田间对比示意图。
23.其中,1、自走轮、2、伸缩支臂、3、下端转向轴承、4、筒形支臂、5、上端竖向传动轴、6、底盘大架、7、直角传动齿轮箱、8、横向传动轴、9、单片机控制模块区及液晶显示触摸屏、10、液压机构、11、转向机构、12、上端转向轴承、13、中空油缸、14、中空活塞、15、活塞空心通孔、16、边减速齿轮、17、下端竖向传动轴、18、下定位传动轴承、19、传动套筒内方孔、20、传动套筒主体、21、竖向传动轴下端方形传动头、22、上定位传动轴承、23、伸缩支臂主体、24、伸缩支臂筒体上的长孔滑道、25、滑轨销、26、实心液压活塞、27、普通双向液压油缸。
具体实施方式
24.下面将结合附图以及具体实施例来详细说明本发明,显然,所描述的实施例仅仅是本发明的的一部分实施例,而不是全部实施例,基于本发明中的实施例,本领域技术人员在没有做出创造性的劳动前提下所获得的所有其它实施例,均属于本发明保护的范围,本发明不受下面所公开的具体实施例的限制。
25.请参见图1、图2、图3、图4、图5、图6、图7、图8中,本发明实施例方案提供了一种田间高杆作物耕作车的自动铅垂伸缩支臂自走轮,包括支臂4、自走轮1、设置在耕作车上的电源、单片机、倾角传感器、液压油泵、液压电磁阀ya、液压油缸13;
26.所述的耕作车底盘大架6的筒形支臂4内连接中空双向液压油缸13,油缸的活塞14
下端连接伸缩支臂主体23,伸缩支臂23为中空结构,其下端的伸缩支臂2连接地脚自走轮1,双向液压油缸活塞14为中空式,活塞空心通孔15内穿过上传动轴5,上传动轴5的下端为方形结构传动头21伸入到外圆内方的圆形传动套筒主体20内的方孔里,且传动套筒主体20内上端为与传动轴下端同样的方孔19,方形结构传动头21可以在方孔19内上下滑动,传动套筒20的下端固定同轴向的下端竖向传动轴17且传动套筒20与下传动轴17固定于一体与上传动轴5同步旋转,传动套筒20上下两端各有轴承18、22连接定位在伸缩支臂主体23的内壁,所述的电源模块连接单片机,倾角传感器连接a/d转换器、连接单片机,将倾斜角度模拟信号经a/d转换为数字量给单片机,单片机连接各驱动电源、各驱动电源连接控制各相连接的液压电磁阀ya的开启、关闭来控制液压油缸13、27,倾角传感器固定在驾驶室的前方单片机控制模块区域9,所述的单片机分内部带有a/d转换和外接a/d转换,单片机连接手动/自动转换模式开关、连接触摸显示屏,所述的液压油泵,驱动电源连接液压油泵电机、液压油泵连接发动机动力,油电混动力可切换,所述的伸缩支臂2支撑耕作车,且在控制液压油缸13、27的作用自动调节地脚自走车轮1保持铅垂状态、调节耕作车保持水平状态。
27.具体的,本发明实施例方案中,所述的伸缩支臂2设置在筒形支臂4内下端,支臂4与耕作车体底盘大架6垂直连接固定。
28.具体的,本发明实施例方案中,所述的伸缩支臂主体23的外层筒体24与支臂4之间设置有转向轴承3、12连接支撑,筒体24连同伸缩支臂2、伸缩支臂筒体主体23、地脚自走轮1可以绕竖向传动轴5、17所在的铅垂轴线旋转使得耕作车转向。
29.具体的,本发明实施例方案中,所述的在外层筒体24壁沿着竖轴方向开有长孔滑道,伸缩支臂主体23上端设置有滑轨销25在长孔内往复上下滑动制约伸缩支臂主体23与筒体保持同一转角,长孔长度为伸缩支臂2的伸缩长度。
30.具体的,本发明实施例方案中,所述的液压油缸为两个雷同的双向液压油缸27代替中空液压油缸13,两个液压油缸的活塞26都与伸缩支臂主体23的上端连接,且两个雷同的双向液压油缸27共用连通同一个液压电磁阀ya。
31.对本发明具体的实施例进一步地描述:
32.请参见图9、图10、图11、图12中,耕作车在丘陵地区和山区坡地田里,作物茎秆28都是铅垂向上生长的,如果耕作车的行走支脚轮1不能调节伸缩就会出现图9、图11的情况,支臂4、伸缩支臂2、地脚自走轮1就会刮断、刮倒苗、伤苗!图11较图9坡度大刮伤苗更严重到挂断苗,为此本发明所提供公开了一种田间高杆作物耕作车的自动铅垂伸缩支臂自走轮,倾角传感器在耕作车上的调试,是在水平平台或水平地面调整倾角为零,并记忆保存在单片机控制系统里,耕作车在不同的坡地里通过倾角传感器将倾角模拟信号输入给单片机的a/d转换为数字量经单片机处理控制各个驱动电源连通控制液压电磁阀ya开启、关闭,控制液压油缸活塞14、26行程大小,调节伸缩支臂2的伸缩长度,达到耕作车保持水平状态,各个支臂2及自走轮1铅垂地心与作物茎秆28平行不刮苗。
33.以上对本发明实施例的所提供的技术方案进行了详细公开介绍,本文中应用了具体个例对本发明实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本发明实施例的原理,同时,对于本领域的一般技术人员,依据本发明实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。