1.本发明涉及一种用于润滑铁路转辙器的装置,该装置是可远程控制的,并且构造成在铁路轨道上移动。本发明还涉及一种系统,其包括所述装置和用于远程控制所述装置的控制器。本发明还涉及一种用于润滑铁路转辙器的方法。
背景技术:
2.铁路转辙器是铁路运营中最重要的资产之一,因为它们允许列车转换轨道并采取不同的路线。然而,它们也是造成大多数列车延误的铁路资产之一,并且它们需要大量维护。事实上,铁路的总维护和检查成本的20
‑
40%与转辙器有关。铁路转辙器的润滑、几何测量以及检查是防止列车延误的基本维护任务。这些活动通过人工劳动来执行,由于安全规定,这需要中断正常的列车服务。这降低了铁路网的货运吨位运力、旅客运力和重大维护能力,并增加了铁路网运转的成本。
3.通常使用测量列车和/或成像列车来执行检查。然而,如果大量地使用路网容量,那么使用这些列车需要中断正常的列车运行。对于每个铁路转辙器,测量列车每年通常要使用2
‑
4次,并且它们不能充当铁路转辙器故障的第一响应者。它们主要针对整个路网的分析。此外,运行测量列车的成本很高。
4.为了避免一些上述缺点,可以使用悬停式无人驾驶空中飞行器(uav)(通常被称为无人机)来进行铁路检查。然而,当在铁路转辙器上执行这种检查时,uav能效差,且运行时间短。此外,在铁路网上进行导航对于悬停式uav来说是困难的,并且对于执行铁路转辙器检查的悬停式uav来说,路线规划的复杂性较高。
技术实现要素:
5.本发明的目的是弥补或减少现有技术的至少一个缺点,或者至少提供一种对现有技术的有用的替代方案。所述目的通过在下文的描述和随后的权利要求中详细说明的特征得以实现。本发明由独立专利权利要求限定,而从属权利要求限定了本发明的有利实施例。
6.在第一方面,本发明更具体地涉及一种用于润滑铁路转辙器的装置,该装置是可远程控制的并且构造成在铁路轨道上移动,其中该装置包括用于润滑剂的容器和构造成用润滑剂润滑铁路转辙器的至少一个喷嘴。该装置例如可以包括适配铁路轨道(通常具有1435mm的间距)的轮子以及为该装置提供推进力的一个或多个马达。由于该装置是可远程控制的,因此它可以是无人的,由此操作者的安全不是问题。被构造为无人的装置也可以被制作得相对小和轻,因此它需要较少的能量来移动。制造起来也可以更便宜。该装置例如可以包括主要由轻质碳材料构成的框架。该装置可以以一种方式来构造,使得其不会干涉任何附近的设施、不会干涉铁路轨道中的电流、或者没有在所述轨道中产生短路的风险。该装置的一些表面或所有表面例如可以涂覆有绝缘材料。此外,如果装置很轻并且列车以高速撞击它,冲击几乎不会影响列车,并且不会伤害乘客。无人且可远程控制的装置还可以是可编程的,以在与使用该铁路轨道的列车的时间表相适配的特定的时间和位置自动运行。因
此,当该装置润滑铁路转辙器时,不需要显著地中断正常列车运行。
7.在一种实施例中,该装置可以包括多个喷嘴和对每个喷嘴进行独立控制的控制系统,其中每个喷嘴被定位成润滑铁路转辙器的不同部分。铁路转辙器通常包括一对连结的锥形铁轨(称为尖轨(switch rails)、尖轨道(points)或尖轨片(point blades)),所述一对连结的锥形铁轨位于分叉的外部铁轨(被称为基本轨)之间。这些尖轨可以侧向地、通常在两个端部位置之间移动,以将来自尖轨的列车引导向两个分叉路径中的任一个。在尖轨下方,通常有多个滑动板来支撑所述尖轨,并确保它们能够在两个位置之间滑动。尖轨在其自由端部处将具有最大的侧向位移,该位移从所述自由端部向尖轨的相反端部变得越来越小,所述相反端部牢固地连接到铁路轨道的不可移动的铁轨。因此,与更加朝向固定端部处相比,尖轨的自由端部处需要更宽的润滑宽度。如果喷嘴可以被彼此独立地控制,则可以通过具有多个喷嘴来获得可变的润滑宽度,所述多个喷嘴定位在距铁路轨道的中心不同距离处。以这种方式,更多的喷嘴可以在尖轨的自由端部处打开,从而与朝向基本轨的端部处相比,润滑更宽的宽度。因此,尖轨的整个可移动区域可以在装置的单次驱动通过中被润滑,而不会由于同样润滑宽区域而浪费润滑剂,在所述宽区域中,尖轨的位移宽度较窄。由于装置需要携带润滑剂,润滑剂的更少使用意味着其需要被重新充注的次数更少,这节省了时间。作为多个喷嘴的替代方案,可以使用具有可变开口宽度的宽口喷嘴,这提供了与多个喷嘴类似的技术效果。作为另一替代方案,至少一个喷嘴可以是可移动的,并且能够在铁轨的横向方向、即垂直于装置在铁路上的运动方向的宽度上分配润滑剂。以此方式,该装置可以润滑铁路转辙器的整个宽度。
8.在一种实施例中,该装置可以进一步包括允许该装置飞行的旋翼。这将具有的优点是,该装置可以快速地移动往返于铁路轨道,由此即使在非常繁忙的铁路轨道上也不需要干扰列车运行。这种装置可以简单地在轨道旁边等待列车通过转辙器,然后飞行并降落到铁路轨道上以润滑转辙器,并再次迅速地飞离轨道。此外,当轨道没有连接到装置的位置附近时,该装置也可以容易且快速地从一个铁路轨道移动到另一铁路轨道。
9.在一个替代实施例中,该装置可以被构造成可附接至包括旋翼的分离的载具(vessel),例如市场上可买到的没有支腿的多旋翼uav。这具有的优点是,如果分离的载具停止工作,例如由于旋翼或旋翼马达损坏,可以快速更换该分离的载具。
10.由于飞行通常比行驶需要更多的能量,所以一个优点在于该装置被构造成在铁路轨道上移动,即使是在其能够飞行时。以此方式,在需要再充注能量之前,该装置可以做更多的工作。由于该装置通常可以使用电马达和电池来提供能量,能量的再充注通常需要对电池进行再充电。能够在铁路轨道上移动的另一优点在于润滑将更加精确,并且与该装置一直在空中的情况相比,润滑受到的例如风的影响更小。此外,在装置已经降落在铁轨上之后,到铁路转辙器的导航变得容易解决,由此执行铁路转辙器的维护和检查的装置的路线规划的复杂性将会很低。
11.该装置通常可以存放在具有许多转辙器的大型铁路站点的自动无人机机库中。较大的列车站或铁路货运站就是这类站点的示例。在较小的站点,该装置可以用货车运输,并从货车送去进行维护和检查。可选地,如果发生意外情况,操作员可以跟随装置并控制它。
12.该装置可以包括各种传感器,这些传感器可以使装置能够自动进行检查和维护。例如,该装置能够在起飞时、降落在轨道上时、在铁路转辙器的维护和检查期间、以及在返
回起飞点时完全自动地飞行和操作。该装置例如可以包括gps系统、指南针、立体相机、热成像相机、激光雷达系统、用于处理数据的ai单元、和/或数据采集和传输单元。
13.例如,从起飞点到轨道上的进入点,装置通常可以遵循由若干预定义的gps坐标组成的飞行路径。装置可以从上方进入轨道,同时仍处于轨道和可能的架空线路之间的竖直空间中。该竖直间隔例如可以在5m左右。标记降落地点的最后一个gps坐标可以是铁轨之间的中点。例如当在所述轨道上进行降落时,该装置将开始向该gps坐标下降,而激光雷达系统可以保持该装置与左右铁轨等距以相对于铁路轨道正确定位该装置。这将确保装置正确地降落在轨道上,并且在gps干涉和/或风的情况下特别有利。可以记录3d图像或视频的立体相机可以确保沿着铁轨的正确定向,例如在gps和指南针干涉的情况下。可以包括人工智能(ai)引擎来处理这些信息,并将其发送到飞行计算机。一旦该装置已经降落在铁轨上,空中推进马达可以被关闭,并且该装置可以通过铁轨推进马达和轮子在轨道上朝向铁路转辙器以合适的速度(例如跑步速度或更高的速度)开始向前移动。
14.由于每个铁路转辙器通常具有前部的至少一个gps坐标,达到该坐标意味着该装置可以减速并开始维护和检查程序。这通常可以以步行速度或更高的速度进行。激光雷达通常是探测转辙器的位置以及尖轨与基本轨之间的间隙宽度的主要传感器。这告诉润滑系统应该打开哪些喷嘴来在转辙器处喷射润滑剂。激光雷达和立体相机可以探测转辙器的滑动板在哪里开始和结束。这控制喷嘴应该何时喷射。激光雷达可以同时获取用于几何计量测量的几何计量数据,立体相机可以拍摄用于视觉检查的相片,而热成像相机可以拍摄用于热检查的相片。这些相机可以例如被编程为在转辙器前部的gps坐标处开始操作,并对整个转辙器拍照。ai引擎可以处理数据并控制润滑系统。数据采集和传输单元可以存储数据并将它们发送到转辙器分析平台和/或资产管理系统。当维护和检查完成时,该装置可以加速并行驶到下一转辙器以重复该程序,或者它可以飞回起飞点。该装置例如可以遵循由若干预定义的gps坐标组成的飞行路径。
15.如果铁路转辙器无法运行,该装置还可以为列车调度员和技术人员提供一线支持。
16.该装置的一个用途可以是经由wi
‑
fi、4g或5g将其连接到铁路运营商通常使用的转辙器分析平台。转辙器分析平台可以收集和分析来自转辙器的传感器数据,并可以直接向装置发送工作命令。工作命令可以附带附加信息,比如gps坐标、首选飞行和铁轨路线、首选时隙和转辙器的类型。这可以实现铁路转辙器的自动维护和检查。当装置在维护和检查铁路转辙器时,它可以将信息以检查图像、热图像、几何计量数据和已经执行的维护类型的形式发送回转辙器分析平台。然后,分析平台可以分析维护和检查的结果,并且将转辙器清理为可接受的状态,或者向现场人员发送工作命令以执行更重大的维护,例如更换马达或尖轨片(blade)。
17.该装置的另一用途可以是将其连接到资产管理系统,并使资产管理系统基于计数器或日历经由维护专员向装置发送工作命令。该装置可以从资产管理系统接收工作命令,这能够实现转辙器的半自动维护和检查。当装置在维护和检查铁路转辙器时,它可以将信息以检查图像、热图像、几何计量数据和已经执行的维护类型的形式发送回资产管理系统。维护专员可以分析维护和检查的结果,并且将转辙器清理为可接受的状态,或者向现场人员发送工作命令以执行更重大的维护。
18.通过使用例如立体相机和/或热成像相机,该装置可以用于检查铁路中的所有类型的基础设施。如果该装置具有旋翼,它还可以在列车的干扰区上方以及任何架空线路飞行,并在不中断正常列车交通的情况下检查铁路。该装置的使用示例可以是对铁轨、枕木、排水涵洞和/或道砟的照相检查,和/或对铁轨温度、架空线路系统、牵引回流系统、接地和粘合系统、铁路转辙器加热系统、绝缘铁轨接头、轨道上或附近的人或动物、和/或可能导致列车延误或列车取消的故障的照相和热成像检查。
19.在一种实施例中,该装置可以进一步包括连接该装置的不同部分的至少一根结实且柔韧的线。这将具有的优点是,如果装置破裂,例如在与列车相撞时,它将被分裂成更少的块,因为结实且柔韧的线将把装置的不同部分保持在一起。因此,装置的碎片撞击并伤害例如附近的人、动物或设施的零件的风险更小。该线可以优选地位于构造该装置的材料内部,以确保所述线不会卡在外部障碍物周围。该线例如可以位于框架内,该框架将轮子彼此连接并连接到包括传感器的中央单元。线的一种可能材料是uhmwpe(超高分子量聚乙烯),也称为hmpe(高模量聚乙烯)或hppe(高性能聚乙烯)。uhmwpe是一种非常高分子量(通常在2至6百万克/摩尔之间)的聚烯烃树脂,它具有非常长的聚合物链。通过加强分子间相互作用,长链更有效地将载荷转移到聚合物骨架上。这导致了一种非常坚韧的材料,其可能具有目前可用的任何热塑性塑料中最高冲击强度。
20.在第二方面,本发明涉及一种系统,该系统包括根据本发明第一方面的装置和用于远程控制所述装置的控制器。
21.在第三方面,本发明涉及一种用于润滑铁路转辙器的方法,其中该方法包括以下步骤:将根据本发明第一方面的装置远程导控至铁路转辙器;远程指示该装置润滑铁路转辙器;以及远程导控该装置离开铁路转辙器,以避免阻碍列车允许通过所述转辙器。
附图说明
22.在下文中描述了附图中所示优选实施例的示例,其中:
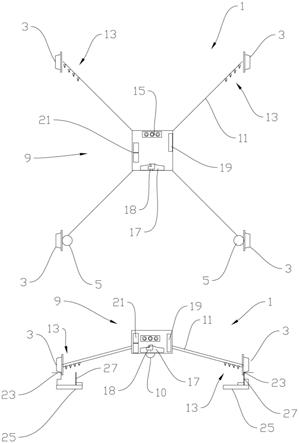
23.图1示出了从上方(图1a)和前方(图1b)观察的根据本发明的装置的实施例;
24.图2示出了从上方观察的并且定位在铁路轨道上在沿着铁路转辙器的两个不同位置处的图1的装置;
25.图3示出了分别从前方和从上方观察的图1和2的装置,其上附接有分离的载具;
26.图4示出了根据本发明的装置的另一实施例,其中旋翼集成到装置中;
27.图5示出了根据本发明的系统,其中该系统包括图4的装置和用于远程控制所述装置的控制器;以及
28.图6示出了可以用在根据本发明的装置上的润滑系统。
29.在附图中,附图标记1表示根据本发明的装置。附图是示意性的,并且其中的特征不一定按比例绘制。相同的附图标记表示相同或相似的特征。
具体实施方式
30.图1a和b示出了分别从上方和前方观察的根据本发明的装置1。装置1包括被构造成在铁路轨道21(图2所示)的铁轨23(图1a中未示出)上移动的轮子3和用于为装置1提供推进力的马达5。尽管附图仅示出了用于装置1后部的轮子3的马达5,但是装置1也可以包括用
于前方的轮子3的马达5。轮子3经由框架11连接,该框架还承载中央单元9。框架11,可能还有中央单元9,可以包括至少一根结实且柔韧的线(在图中不可见),该线内置在所述框架11和可能的中央单元9的材料中,由此在与列车碰撞的情况下,装置1将被破裂成更少的碎片。中央单元9包括具有立体和热成像相机的相机单元15、用于测量距离的激光雷达10、用于处理收集的数据的ai单元19、电池21和用于润滑剂的容器17。装置1包括用于润滑铁路转辙器31(图2示出)的多个喷嘴13,喷嘴13定位在装置1前部的每一侧。容器17与泵18相关联以用于经由合适的管道49(图6示出)将润滑剂泵送到喷嘴13。喷嘴13被单独控制,并且被定位成使得当装置1处于所述铁轨23上的使用位置中时,这些喷嘴具有到铁轨23的不同的距离。以这种方式,喷嘴13可以润滑滑动板25(尖轨27在该滑动板上移动)的基本整个宽度。
31.图2a和b示出了从上方观察的并且定位在铁路轨道21上在沿着铁路转辙器31的两个不同位置处的图1的装置1。铁路轨道21包括由铁路枕木29支撑的铁轨23,并且铁路转辙器31包括可在滑动板25上移动的尖轨27。尖轨27在一个端部33处固定,基本上围绕该固定端部33可枢转。因此,相反的自由端部35具有跨越滑动板25的最大侧向移动。在图2a中,装置1刚刚进入铁路转辙器31,使得用于润滑铁路转辙器31的喷嘴13在第一滑动板25上方。相机单元15和/或激光雷达系统10可以探测第一滑动板25的位置。在该位置,尖轨27具有最大侧向移动,因此所有的喷嘴13都打开以润滑滑动板25的相应的宽度区域。随着装置1沿着铁路转辙器31移动,尖轨27的移动范围减小。例如,在图2b所示的装置1的位置,喷嘴13基本上在尖轨27的固定端部33的上方。由于尖轨27在该位置处移动得不明显,因此只需要狭窄的润滑区域,因此只有在尖轨27正上方的喷嘴13是打开的。相机单元15和/或激光雷达系统10可以探测哪些喷嘴13应该打开。替代地,应该在转辙器31的任何给定位置处打开的喷嘴13可以通过转辙器31的几何结构预先确定。以这种方式,将没有润滑剂因被喷洒在铁路转辙器31的转辙器轨道不再移动的部分(因此不需要润滑这些部分)上而被浪费。装置1因此可以在其必须重新充注之前润滑更多的转辙器轨道31。
32.图3a和b示出了分别从前方和上方观察的图1和2中的装置1,包括旋翼7的分离的载具41附接在该装置上。旋翼7由马达8驱动。以此方式,装置1能够飞行。分离的载具41例如可以是商业上可获得的载具,由此如果它被损坏或发生故障,它可以容易地被更换。
33.图4a和b示出了类似于图1
‑
3所示装置1的装置1,但是其中旋翼7和相应的马达8集成在装置1的框架11中。这种集成具有的优点是,图4所示的装置1可以比图3所示的具有附接的分离的载具41的装置1制作得更轻。特别是在飞行时,为了使用尽可能少的能量,装置1的重量很重要。
34.图5示出了根据本发明的系统43,其中系统43包括图4的装置1和用于远程控制所述装置1的控制器45。控制器45例如可以用于直接实时操纵装置1、观看来自装置1的相机单元15的实况记录、和/或对装置1进行编程以执行特定任务。控制器45可以是用于特定装置的专用控制器,或者它可以是可以安装在例如计算机、平板电脑或手机上的计算机程序。
35.图6示出了可以用在根据本发明的装置1上的润滑系统47。润滑系统47包括:容器17,其用于润滑剂;多个喷嘴13,所述多个喷嘴每个都具有可以彼此独立地控制的阀51;以及泵18,其用于经由合适的管道49将润滑剂从容器17泵送到喷嘴13。取决于打开的喷嘴13的数量,泵18可以具有不同的泵速。当润滑剂被泵出时,空气阀57允许空气进入容器17。该系统还包括在容器17和泵18之间的主阀53,由此所述容器17和泵18之间的流体连接可以被
阻断。这可以是有益的,例如当清洁泵18时。螺帽55封闭容器17中的开口。螺帽55可以在在容器17上重新充注润滑剂之前拧下。容器17例如能够容纳10升体积的润滑剂。
36.应当注意的是,上述实施例说明而不是限制本发明,并且本领域技术人员将能够在不脱离所附权利要求的范围的情况下设计许多替代实施例。在权利要求中,括号中的任何附图标记不应被解释为限制权利要求。动词“包括”及其变形的使用不排除权利要求中没有陈述的元件或步骤的存在。元件前面的冠词“一”或“一个”不排除多个这种元件的存在。
37.在相互不同的从属权利要求中叙述的某些措施的纯粹的事实并不表示这些措施的组合不能被使用以获利。