1.本实用新型涉及清洁机器人技术领域,尤其涉及一种自动更换机器人清洗旋转抹布模块的机构。
背景技术:
2.随着现代科技的快速发展,机器人的应用领域也越来越广泛,已经与人们的日常生活紧密连接在一起,而清洁机器人是集自动清洁技术和人性智能设计于一体的机器人,一般采用刷扫、吸尘、擦地等方式,将地面杂物吸纳进入自身的垃圾收纳盒,从而完成地面清洁,与其配套使用的还有清洗基站,但是目前市面上清洗基站不具备自动拆装机器人抹布的功能,往往需要人员进行操作,操作繁琐麻烦。
技术实现要素:
3.本实用新型的目的是解决现有技术中存在的缺点,而提出的一种自动更换机器人清洗旋转抹布模块的机构。
4.为了实现上述目的,本实用新型采用了如下技术方案:一种自动更换机器人清洗旋转抹布模块的机构,包括机器人和基站,所述机器人的底面对称固定安装有抹布模块,所述抹布模块的内部设置有磁铁模块,所述基站的两侧对称开设有移动轨道,所述基站的内部对称设置有移动夹头,所述基站的内部设置有抹布安装拆卸平台,所述抹布安装拆卸平台的上表面对称设置有电磁铁。
5.为了方便移动夹头带着机器人进行移动,本实用新型改进有,所述移动夹头与移动轨道的内壁滑动连接。
6.为了实现抹布的自动拆装,本实用新型改进有,所述磁铁模块和电磁铁的尺寸大小相适配。
7.为了提高机器人的移动效果,本实用新型改进有,所述机器人的下表面对称设置有驱动轮,所述机器人远离抹布模块一端的下表面设置有尾轮。
8.为了方便机器人进站,本实用新型改进有,所述基站的一侧固定安装有进站斜坡。
9.与现有技术相比,本实用新型的优点和积极效果在于:
10.本实用新型中,通过设置该磁铁模块和电磁铁,在移动夹头和移动轨道的辅助作用下,通过对电磁铁的通电和反向通电,来控制电磁铁的磁力有无,从而对抹布实现吸附和松开,进而实现对机器人抹布的自动拆装,不需要人工进行拆装,操作简单方便。
附图说明
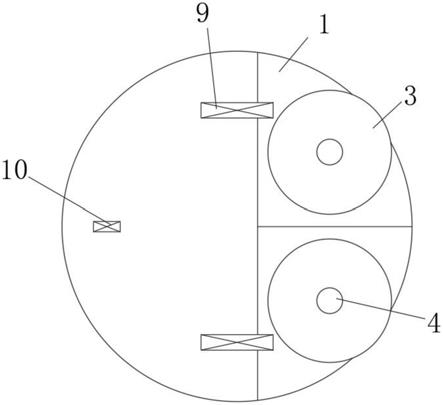
11.图1为本实用新型提出一种自动更换机器人清洗旋转抹布模块机器人结构示意图;
12.图2为本实用新型提出一种自动更换机器人清洗旋转抹布模块基站侧视结构示意图;
13.图3为本实用新型提出一种自动更换机器人清洗旋转抹布模块基站俯视结构示意图。
14.图例说明:
15.1、机器人;2、基站;3、抹布模块;4、磁铁模块;5、移动轨道;6、移动夹头;7、抹布安装拆卸平台;8、电磁铁;9、驱动轮;10、尾轮。
具体实施方式
16.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
17.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
18.请参阅图1-3,本实用新型提供一种技术方案:一种自动更换机器人清洗旋转抹布模块的机构,包括机器人1和基站2,机器人1的底面对称固定安装有抹布模块3,抹布模块3的内部设置有磁铁模块4,基站2的两侧对称开设有移动轨道5,基站2的内部对称设置有移动夹头6,移动夹头6与移动轨道5的内壁滑动连接,基站2的内部设置有抹布安装拆卸平台7,抹布安装拆卸平台7的上表面对称设置有电磁铁8,磁铁模块4和电磁铁8的尺寸大小相适配,在本实用新型中,在机器人1和基站2原有的配合基础上,增设了磁铁模块4和电磁铁8,通过对电磁铁8的通电和反向通电,来控制电磁铁8对抹布的吸附作用,同时利用移动夹头6的夹持作用和移动轨道5的导向作用,带动着机器人1位置的改变,从而保证在整个过程中,能够自动实现机器人1抹布的自动拆装,操作简单方便。
19.机器人1的下表面对称设置有驱动轮9,机器人1远离抹布模块3一端的下表面设置有尾轮10,驱动轮9的数量为两组,可以保证机器人1运动过程的流畅,而尾轮10可以保持机器人1运动过程的稳定性。
20.基站2的一侧固定安装有进站斜坡,设置该进站斜坡,可以为机器人1进站提供一个的缓冲平台,方便机器人1进入到基站2的内部。
21.工作原理:当机器人1需要进行吸尘模式,此时机器人1进入基站2并检测进站到位,此时抹布模块3内置的磁铁正好位于抹布安装拆卸平台7电磁铁8的正上方,电磁铁8通电会产生磁力并以一定的吸力吸住抹布模块3,移动夹头6会把机器人1夹住,并沿着移动轨道5上升,机器人1被抬起,抹布模块3由于被电磁力吸住,从机器人1上分离,并留在基站2上,此时基站2上的移动夹头6继续夹紧机器人1,并沿着移动轨道5后移指定距离后把机器人1降落下来,机器人1后退,并退出基站2进入到吸尘的工作状态模式,抹布模块3拆卸动作结束,当机器人1需要进行拖地模式时,此时机器人1进入基站2并检测进站到位,基站2的移动夹头6夹住机器人1并把机器人1抬升,抬升到指定位置后,沿着移动轨道5把机器人1移动到抹布安装拆卸平台7的正上方,移动夹头6下降,机器人1降落,机器人1与抹布模块3的安
装位完成对接并安装到位,电磁铁8反向通电,此时电磁力消失,电磁铁8与抹布模块3之间的吸力消失,机器人1后退并退出基站2,进入到拖地的工作模式,抹布模块3的安装动作结束。
22.以上,仅是本实用新型的较佳实施例而已,并非对本实用新型作其他形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其他领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
技术特征:
1.一种自动更换机器人清洗旋转抹布模块的机构,包括机器人(1)和基站(2),其特征在于:所述机器人(1)的底面对称固定安装有抹布模块(3),所述抹布模块(3)的内部设置有磁铁模块(4),所述基站(2)的两侧对称开设有移动轨道(5),所述基站(2)的内部对称设置有移动夹头(6),所述基站(2)的内部设置有抹布安装拆卸平台(7),所述抹布安装拆卸平台(7)的上表面对称设置有电磁铁(8)。2.根据权利要求1所述的一种自动更换机器人清洗旋转抹布模块的机构,其特征在于:所述移动夹头(6)与移动轨道(5)的内壁滑动连接。3.根据权利要求1所述的一种自动更换机器人清洗旋转抹布模块的机构,其特征在于:所述磁铁模块(4)和电磁铁(8)的尺寸大小相适配。4.根据权利要求1所述的一种自动更换机器人清洗旋转抹布模块的机构,其特征在于:所述机器人(1)的下表面对称设置有驱动轮(9),所述机器人(1)远离抹布模块(3)一端的下表面设置有尾轮(10)。5.根据权利要求1所述的一种自动更换机器人清洗旋转抹布模块的机构,其特征在于:所述基站(2)的一侧固定安装有进站斜坡。
技术总结
本实用新型涉及清洁机器人技术领域,具体为一种自动更换机器人清洗旋转抹布模块的机构,包括机器人和基站,机器人的底面对称固定安装有抹布模块,抹布模块的内部设置有磁铁模块,基站的两侧对称开设有移动轨道,基站的内部对称设置有移动夹头,基站的内部设置有抹布安装拆卸平台,抹布安装拆卸平台的上表面对称设置有电磁铁,移动夹头与移动轨道的内壁滑动连接。本实用新型,通过设置该磁铁模块和电磁铁,在移动夹头和移动轨道的辅助作用下,通过对电磁铁的通电和反向通电,来控制电磁铁的磁力有无,从而对抹布实现吸附和松开,进而实现对机器人抹布的自动拆装,不需要人工进行拆装,操作简单方便。操作简单方便。操作简单方便。
技术研发人员:熊大江 杨正彬
受保护的技术使用者:广东立霖智能科技有限公司
技术研发日:2021.09.10
技术公布日:2022/1/28