1.本实用新型涉及扫地机器人的技术领域,尤其涉及一种尘盒的安装结构及其扫地机器人。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成底板清理工作。
3.扫地机器人的机身为无线机器,以圆盘型为主。使用充电电池运作,操作方式以遥控器、或是机器上的操作面板。一般能设定时间预约打扫,自行充电。前方有设置感应器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,并依每间不同厂商设定,而走不同的路线,有规划的清扫地区。
4.扫地机器人是不需要看管而自动对地面进行清洁的智能设备,通常扫地机器人上都设有灰尘盒,用于在地面清洁时收集灰尘。灰尘盒通常设于清洁机器人的尾部,灰尘盒上设有便于操作者取用的提手,这样会缩小灰尘盒的容纳面积,且扫地机器人的尘盒安装结构与灰尘盒之间同样要设置连接装置,导致扫地机器人的尘盒安装结构不够优化。
技术实现要素:
5.本实用新型实施例的目的在于:提供一种尘盒的安装结构及其扫地机器人,旨在解决扫地机器人的尘盒安装结构不够优化的问题。
6.为达上述目的,本实用新型采用以下技术方案:
7.提供一种尘盒的安装结构,包括:
8.安装壳体,所述安装壳体具有与灰尘盒适配的嵌入腔,所述嵌入腔腔壁的边缘沿其竖直方向向内凹陷形成凹面,所述凹面包括至少两个分别对应设于所述嵌入腔相对边缘的取放槽以及至少一个设于所述嵌入腔边缘的容置槽,所述灰尘盒的端部凸设有凸出结构;
9.所述取放槽用于供使用者的手指施力而取出所述灰尘盒;
10.所述容置槽用于对所述凸出结构的避让。
11.进一步地,所述嵌入腔的内壁沿其水平方向向内凸设有进风部,所述进风部具有与外界相连通的进气口,所述进风部与所述灰尘盒的侧壁卡接,且所述进气口与所述灰尘盒的进尘口相连通。
12.进一步地,还包括安装孔,所述安装孔位于所述嵌入腔的侧壁上,且所述安装孔通过与所述灰尘盒上的卡扣装置卡接,进而将所述灰尘盒连接于所述嵌入腔内。
13.进一步地,所述安装孔设置有多个,多个所述安装孔均布于所述嵌入腔的正对侧壁上,且分布于所述嵌入腔的侧壁的所述安装孔对应与所述卡扣装置卡接。
14.进一步地,所述嵌入腔的侧壁凸设有弹性部,所述弹性部、所述安装孔分别位于所述嵌入腔正对或相邻的两侧壁,所述弹性部可沿所述嵌入腔的水平方向进行伸缩,使得所
述灰尘盒设于所述嵌入腔内时,所述弹性部对所述灰尘盒卡接。
15.进一步地,所述嵌入腔的侧壁上还设置有吸风口,所述吸风口、所述进风部分布于所述嵌入腔正对或相邻的侧壁上,所述吸风口与所述灰尘盒的出风口对应设置,当风机对应所述出风口工作时,所述灰尘盒内产生负压。
16.进一步地,所述嵌入腔的上表面与所述灰尘盒的上表面平齐。
17.进一步地,所述安装孔设置有两个,两个所述安装孔位于所述嵌入腔的同一侧边缘上,且位于一个所述取放槽的左右两侧。
18.一种扫地机器人,包括如上述任一项所述的尘盒的安装结构。
19.与现有技术相比,本实用新型的有益效果为:本实用新型在灰尘盒的安装壳体上设置有取放槽以及容置槽,取放槽用于供使用者的手指施力而取出灰尘盒,不需要在灰尘盒上额外增加把手,增大了灰尘盒的使用空间;嵌入腔既能容纳灰尘盒也能对灰尘盒进行卡接,容置槽可用于对灰尘盒本身的凸出结构的避让,实现扫地机器人的结构优化。
附图说明
20.下面根据附图和实施例对本实用新型作进一步详细说明。
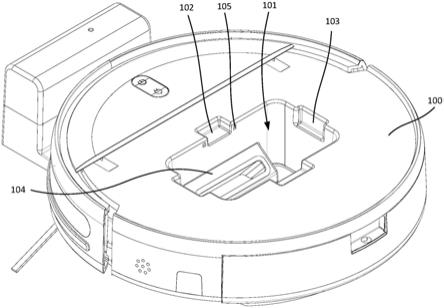
21.图1为本实用新型实施例所述尘盒的安装结构及其扫地机器人立体结构示意图。
22.图2为本实用新型实施例所述尘盒的安装结构及其扫地机器人的安装结构的示意图。
23.图3为本实用新型实施例所述尘盒的安装结构及其扫地机器人的安装结构的另一视角结构示意图。
24.图中:
25.100、安装壳体;101、嵌入腔;102、取放槽;103、容置槽;104、进风部;105、安装孔;106、弹性部;300、顶盖;301、连接部;302、扣合部;303、卡扣装置。
具体实施方式
26.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面对本实用新型实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
28.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特
征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
29.扫地机器人是不需要看管而自动对地面进行清洁的智能设备,通常扫地机器人上都设有灰尘盒,用于在地面清洁时收集灰尘。灰尘盒通常设于清洁机器人的尾部,灰尘盒上设有便于操作者取用的提手,这样不仅会缩小灰尘盒的容纳面积,且扫地机器人的尘盒安装结构与灰尘盒之间同样要设置连接装置,导致扫地机器人的尘盒安装结构不够优化,不利于市场竞争。
30.如图1所示,本实施例提供一种尘盒的安装结构,包括:
31.安装壳体100,所述安装壳体100具有与灰尘盒适配的嵌入腔101,所述嵌入腔101腔壁的相对边缘沿其竖直方向向内凹陷形成凹面,所述凹面包括至少两个分别对应设于所述嵌入腔101相对边缘的取放槽102以及至少一个设于所述嵌入腔101边缘的容置槽103,所述灰尘盒的端部凸设有凸出结构;
32.所述取放槽102用于供使用者的手指施力而取出所述灰尘盒;
33.所述容置槽103用于对所述凸出结构的避让。
34.本实用新型中,在灰尘盒的安装壳体上设置有取放槽102以及容置槽103,取放槽102用于供使用者的手指施力而取出灰尘盒,不需要在灰尘盒上额外增加把手,增大了灰尘盒的使用空间;嵌入腔101既能容纳灰尘盒也能对灰尘盒进行卡接,容置槽103可用于对灰尘盒的凸出结构的避让,实现扫地机器人的结构优化。
35.本实用新型中,所述灰尘盒设于所述嵌入腔101内,且所述灰尘盒从扫地机器人的上部取出或安装,可以理解的是,所述取放槽102设置有两个,两个所述取放槽102可对称设于所述嵌入腔101的相对边缘,在另一实施例中,两个所述取放槽102设于所述嵌入腔101的相对边缘即可。
36.优选的,所述嵌入腔101以及所述灰尘盒设置成矩形状,所述嵌入腔101、所述灰尘盒还可设置成其他形状,以矩形状为例,所述容置槽103设置有两个,两个所述容置槽103对称设置在所述嵌入腔101的相对边缘上,在另一实施例中,所述嵌入腔101的一边缘可间隔设置有所述取放槽102以及所述容置槽103。
37.可以理解的是,所述容置槽103的数量可根据所述顶盖300与所述灰尘盒连接的所述凸出结构的数量进行设置。
38.进一步地,所述嵌入腔101的内壁沿其水平方向向内凸设有进风部104,所述进风部104具有与外界相连通的进气口,所述进风部104与所述灰尘盒的侧壁卡接,且所述进气口与所述灰尘盒的进尘口相连通。
39.如图2所示,所述进风部104设置于所述嵌入腔101的底部,所述进风部 104的上表面设置成从左至右高度降低(图示视角)的倾斜面,所述灰尘盒的侧壁设置有与所述进风部104适配的卡接槽,当所述灰尘盒设于所述嵌入腔101 内时,所述进风部104可对所述灰尘盒的卡接槽进行卡接。
40.在本实用新型中,还包括安装孔105,所述安装孔105位于所述嵌入腔101 的侧壁上,且所述安装孔105通过与所述灰尘盒上的卡扣装置303卡接,进而将所述灰尘盒连接于所述嵌入腔101内。
41.如图2所示,所述安装孔105沿所述嵌入腔101的水平方向向外延伸一段距离,本实
施方式中,所述安装孔105设置有两个,两个所述安装孔105位于所述嵌入腔101的同一侧边缘上,为了所述扫地机器人的结构更优化,两个所述安装孔105位于所述取放槽102的左右两侧,使得所述卡扣装置303与所述安装孔105适配时,方便使用者的手放入所述取放槽102内,对所述卡扣装置 303施加力,进行所述灰尘盒的安装或拆卸。
42.进一步地,所述安装孔设置有多个,多个所述安装孔均布于所述嵌入腔 101的正对侧壁上,且分布于所述嵌入腔101的侧壁的所述安装孔105对应与所述卡扣装置303卡接。
43.在另一实施例中,所述嵌入腔101的相对侧壁上分别设置有所述安装孔 105,位于所述嵌入腔101同一侧的侧壁上的所述安装孔105设置有两个,这里可以看成一组,每一组的两个所述安装孔105设于所述取放槽102的左右两侧,如图2所示。
44.可以理解的是,所述卡扣装置303设置有两个,两个所述卡扣装置303对应设于所述顶盖300的相对侧壁上,且一个所述卡扣装置303与一个所述取放槽102对应、以与该取放槽102周侧的那组安装孔105对应卡接。
45.其中,所述嵌入腔101的侧壁凸设有弹性部106,所述弹性部106、所述安装孔105分别位于所述嵌入腔101正对或相邻的两侧壁,所述弹性部106可沿所述嵌入腔101的水平方向进行伸缩,使得所述灰尘盒设于所述嵌入腔101内时,所述弹性部106对所述灰尘盒卡接。
46.优选的,为了保证所述灰尘盒与所述嵌入腔101更好的安装与拆卸,所述弹性部106设置成圆弧形,当使用者对所述灰尘盒进行安装或拆卸时,所述弹性部106可在所述灰尘盒的侧壁的挤压下,自动进行伸缩;当所述灰尘盒设于所述嵌入腔101内时,所述弹性部106可对所述灰尘盒进行卡接。
47.进一步的,弹性部106朝向嵌入腔101中心的一端为小端,远离小端的一侧为大端,小端为弧形且用于接触和抵顶灰尘盒;大端为固定端,连接于嵌入腔101内壁,小端与大端之间圆滑过渡。
48.优选的,弹性部106可以仅部分具有弹性收缩能力,比如在小端与大端之间,可轴向伸缩。
49.进一步地,所述嵌入腔101的侧壁上还设置有吸风口,所述吸风口、所述卡接部分布于所述嵌入腔101正对或相邻的侧壁上,所述吸风口与所述灰尘盒的出风口对应设置,当风机对应所述出风口工作时,所述灰尘盒内产生负压。
50.本实施方式中,整体的风路结构大致排列为:嵌入腔101、进风部104(进气口)、灰尘盒、灰尘盒的出风口、嵌入腔101的吸风口。
51.具体的,所述风机设于所述扫地机器人内,且所述风机设于所述嵌入腔 101的外侧,所述灰尘盒具有吸尘口以及所述出风口,所述吸尘口与所述进风部104对应设置,在本实施例中,所述吸风口以及所述卡接部设置于所述嵌入腔101的相对侧壁上。
52.本实施方式中,嵌入腔101的上表面与灰尘盒的上表面平齐。
53.一实施例中,所述灰尘盒盖设有顶盖300,所述凸出结构与所述卡扣装置 303设置于所述顶盖300上,所述顶盖300的周侧与所述灰尘盒的周侧平齐,且所述顶盖300的侧端分别设置有与所述灰尘盒转动连接的连接部301以及与所述灰尘盒的凸出结构卡扣的扣合部302,所述连接部301、所述扣合部302分别对应安置于一个所述容置槽103内。在本实施方式中,容置槽103设置为2个。
54.所述卡扣装置303设于所述顶盖300本体的侧壁上,且所述卡扣装置303 与所述敞
口端的内壁卡接。
55.一种扫地机器人,包括如上述任一项所述的尘盒的安装结构。
56.本实用新型中,具有上述尘盒的安装结构的扫地机机器人,在灰尘盒的安装壳体上设置有取放槽102以及容置槽103,取放槽102用于供使用者的手指施力而取出灰尘盒,不需要在灰尘盒上额外增加把手,增大了灰尘盒的使用空间;嵌入腔101既能容纳灰尘盒也能对灰尘盒进行卡接,容置槽103可用于对灰尘盒的凸出结构的避让,实现扫地机器人的结构优化。
57.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以适当组合,形成本领域技术人员可以理解的其他实施方式。
58.以上结合具体实施例描述了本实用新型的技术原理。这些描述只是为了解释本实用新型的原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型的其它具体实施方式,这些方式都将落入本实用新型的保护范围之内。