1.本发明涉及一种例如使盛饭装置中的选择按钮为非接触传感器从而不触摸选择按钮就能够盛饭的、使用非接触传感器的盛饭装置。
背景技术:
2.以往,提出了如下一种装置:例如在盛饭装置中,在容器载置部设置碗,当启动操作面板的规定的选择按钮(按饭的重量存在多个选择按钮,例如150g的选择按钮)时,食材输送叶片以中心轴为中心旋转,以所述中心轴为中心的固定圆盘上的饭从该固定圆盘的外周缘下落到在下层的旋转圆筒体设置的多个食材室,通过以所述中心轴为中心的旋转圆筒体旋转,食材室在以所述中心轴为中心的固定底板上旋转,通过所述食材室经过所述固定底板上设置的开口,饭从所述开口下落,通过在所述开口的下侧设置的一对释放辊在相向方向上旋转,饭被释放并向下方移动,饭下落到在下方的容器载置部载置的所述碗中从而被供给到该碗,当由电子秤测量出的重量变为150g时,停止所述食材输送叶片、旋转圆筒体的旋转(专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-14981号公报
技术实现要素:
6.发明要解决的问题
7.另外,所述盛饭装置例如设置在职员食堂等,会有很多人触摸其选择按钮,但是由于最近的新型病毒的流行,尽可能避免大量人触摸装置的必要性提高。
8.本发明是鉴于上述以往的问题而完成的,目的在于提供一种使选择按钮为非接触传感器从而不触摸选择按钮就能够盛出期望的盛出量的饭的、使用非接触传感器的盛饭装置。
9.用于解决问题的方案
10.为了实现上述目的,本发明如下:
11.第一,由使用非接触传感器的盛饭装置构成,该使用非接触传感器的盛饭装置与所选择的饭的重量对应地,向载置的容器内供给饭并且测量所述容器内的饭的重量,在饭的重量变为所选择的重量的时间点停止饭的供给,在前表面的操作面板设置有多个非接触传感器,各所述非接触传感器分别与饭的不同重量对应,所述使用非接触传感器的盛饭装置设置有控制部,该控制部探测各所述非接触传感器的中的任一者的触发来进行饭输送部的动作,所述控制部中设置有:重量识别单元,其探测任一个所述非接触传感器的非接触方式的触发,来识别与所述非接触传感器对应的饭的重量;驱动单元,其基于所选择的任一个所述非接触传感器的触发,来驱动所述饭输送部从而向所述容器内供给饭;以及测量单元,其基于来自秤部的测量值,来测量向所述容器内供给的饭的重量,其中,在通过所述测量单
元得到的饭的重量的测量值变为使用所述非接触传感器选择出的重量时,所述重量识别单元对所述驱动单元送出停止信号,停止所述饭输送部的动作。
12.所述饭输送部能够由饭输送部(9)构成。所述饭输送部(9)例如能够由食材输送叶片(9)、固定圆形台(15)、旋转圆筒体(l6)、食材室(18)、开口(23)、释放辊(24a、24b)等构成。所述秤部例如能够由电子秤(28)构成。当这样构成时,能够通过非接触传感器选择饭的重量,因此完全不用触摸选择按钮就能够选择饭的重量,作为新型病毒的感染预防对策而言非常有效。
13.第二,由根据所述第一所述的使用非接触传感器的盛饭装置构成,其中,所述控制部中设置有触发时间判别单元,所述触发时间判别单元判别通过将手或手指覆在任一个所述非接触传感器的各可检测范围内而选择的所述非接触传感器的触发状态是否持续了规定时间,所述驱动单元仅在所述触发时间判别单元中的触发状态持续了所述规定时间时驱动所述饭输送部。
14.所述规定时间例如是0.5秒。当这样构成时,由于是非接触传感器,因此其它某种动作也可能导致变为触发状态,但是根据触发时间判别单元,仅在触发状态持续了规定时间时才驱动饭输送部,因此能够有效地防止非接触传感器的误动作。
15.第三,由根据第一或第二所述的使用非接触传感器的盛饭装置构成,其中,各所述非接触传感器以多个非接触传感器并列配置的方式配置,并且各所述非接触传感器的每个所述非接触传感器具有可检测范围,所述控制部中设置有单独判别单元,在基于所述单独判别单元的判别而判别为2个以上的所述非接触传感器同时被触发的状态下,所述驱动单元不开始所述饭输送部的动作,仅在基于所述单独判别单元的判别而判别为单独的所述非接触传感器被触发的状态下,所述驱动单元开始所述饭输送部的动作。
16.当这样构成时,由于是非接触传感器,因此例如也能够将手等覆在相邻的非接触传感器这两方的可检测范围内,因此在这种情况下不开始动作,仅在只有单独的非接触传感器变为触发状态时开始饭输送部的动作,从而能够有效地防止非接触传感器的误动作。
17.第四,由根据所述第一至第三中的任一项所述的使用非接触传感器的盛饭装置构成,其中,所述控制部中设置有容器重量判别单元,该容器重量判别单元探测容器的重量是否足够,仅在通过所述容器重量判别单元的判别而判别为容器的重量为固定重量以上的重量的情况下,所述驱动单元驱动所述饭输送部,在通过所述容器重量判别单元的判别而判别为所述容器的重量为小于固定重量的重量的情况下,所述驱动单元不进行所述饭输送部的驱动。
18.当这样构成时,例如能够防止在载置了不足以承受热饭、饭的重量等的容器(例如纸容器)等的情况下的误动作,仅在载置了足以承受饭的温度、饭的重量等的容器的情况下驱动饭输送部,由此能够防止误动作。
19.第五,由根据所述第一至第四中的任一项所述的使用非接触传感器的盛饭装置构成,其中,在所述操作面板的多个所述非接触传感器的附近显示有与各所述非接触传感器对应的饭的重量,所述操作面板中设置有显示部,所述控制部中设置有显示控制单元,该显示控制单元在手或手指覆在所述非接触传感器的所述可检测范围内时,使所述显示部显示被分配给该非接触传感器的重量。
20.当这样构成时,在选择了非接触传感器的情况下,也在显示部中显示该非接触传
感器的饭的重量是多少克,因此能够使操作者获知盛饭装置侧已识别所选择的饭的重量。
21.第六,由根据所述第一至第五中的任一项所述的使用非接触传感器的盛饭装置构成,其中,所述操作面板中设置有与多个所述非接触传感器对应的多个接触式的选择按钮,各所述选择按钮被分配与该各所述选择按钮所对应的所述非接触传感器的重量相同的重量,所述控制部在检测到任一个所述选择按钮被按压时,驱动所述饭输送部从而进行向容器供给与所述选择按钮对应的重量的饭的供给动作。
22.当这样构成时,能够设置非接触传感器和接触型的选择按钮这两方,操作者能够随意地选择。
23.发明的效果
24.本发明如上所述,由于能够通过非接触传感器选择饭的重量,因此完全不用接触选择按钮就能够选择饭的重量,作为新型病毒的感染预防对策而言非常有效。
25.另外,由于是非接触传感器,因此可能由于某种其它动作而变为触发状态,但是根据触发时间判别单元,仅在触发状态持续了规定时间时才驱动饭输送部,因此能够有效地防止非接触传感器的误动作。
26.另外,由于是非接触传感器,因此例如也能够将手等覆在相邻的非接触传感器这两方的可检测范围内,因此在这种情况下不开始动作,仅在只有单独的非接触传感器变为触发的状态时开始饭输送部的动作,从而能够有效地防止非接触传感器的误动作。
27.另外,例如能够防止在载置了不足以承受热饭、饭的重量的容器(例如纸容器)等的情况下的误动作,仅在载置了足以承受饭的温度、饭的重量等的容器的情况下驱动饭输送部,由此能够防止误动作。
28.另外,在选择了非接触传感器的情况下,也在显示部中显示该非接触传感器的饭的重量是多少克,因此能够使操作者获知盛饭装置侧已识别所选择的饭的重量。
29.另外,能够设置非接触传感器和接触型的选择按钮这两方,操作者能够随意地选择。
附图说明
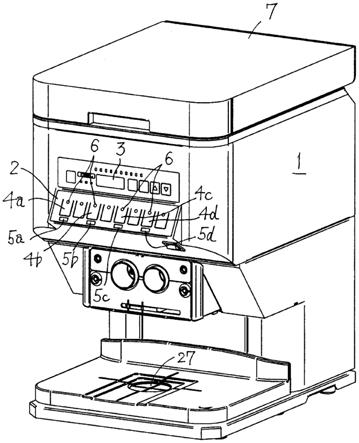
30.图1是本发明所涉及的使用非接触传感器的盛饭装置的立体图。
31.图2是示出同上装置的非接触传感器的可检测范围的图,(a)为侧视图,(b)为正视图。
32.图3是同上装置的侧面侧的纵截面图。
33.图4是同上装置的内部的料斗和饭输送部的立体图。
34.图5是同上装置的内部的饭输送部的立体图。
35.图6是同上装置的饭输送部的里面侧立体图。
36.图7是同上装置的饭输送部的俯视图。
37.图8是同上装置的正面侧的纵截面图。
38.图9是同上装置的释放辊的驱动系统的俯视图。
39.图10是同上装置的控制部的电气框图。
40.图11是同上装置的控制部的功能模块。
41.图12是示出同上装置的控制部的动作过程的流程图。
42.图13是示出同上装置的控制部的动作过程的流程图。
43.附图标记说明
44.1:盛饭装置;2:操作面板;3:显示部;4a~4d:选择按钮;5a~5d:非接触传感器;9:饭输送部;26:容器;28:电子秤;29:控制部;29a:重量识别单元;29b:驱动单元;29c:测量单元;29d:单独判别单元;29e:触发时间判别单元;29f:容器重量判别单元;29g:显示控制单元;e:可检测范围;r:饭。
具体实施方式
45.下面,对本发明相关进行详细说明。
46.如图1所示,本发明所涉及的盛饭装置1在正面设置有操作面板2和显示部3,在操作面板2,按饭的重量沿横向并列设置有选择按钮4a(饭50g)、选择按钮4b(饭100g)、选择按钮4c(饭150g)、选择按钮4d(饭200g),在各选择按钮的下侧,按与各选择按钮相同的饭的重量设置有作为非接触式的按钮的非接触传感器5a(饭50g)、非接触传感器5b(饭100g)、非接触传感器5c(饭150g)、非接触传感器5d(饭200g)。
47.另外,在所述选择按钮4a~4d的上部分别设置有使用led的点亮部6,构成为:在选择按钮4a~4d中的任一个被按压时或者在非接触传感器5a~5d中的任一个被触发(on)时,点亮部6点亮。另外,在操作面板2的所述非接触传感器4a~4d的附近或者所述选择按钮5a~5d的附近的部分,通过印刷等而显示有各按钮所对应的饭的重量、即50g、100g、150g、200g。
48.另外,构成为:在操作按钮4a~4d中的任一个被按压时或者在非接触传感器5a~5d中的任一个被触发时,在所述显示部3中显示所选择的饭的重量(例如非接触传感器5b触发时为100g)。
49.所述非接触传感器5a~5d是使用光电传感器的非接触传感器或者静电容型的非接触传感器等(也可以是其它形式的非接触传感器),如图2的(a)、(b)所示,所述非接触传感器5a~5d具有大致圆锥型的检测区域(可检测范围)e,该检测区域e是非接触传感器5a~5d的前方距离t1的范围和以非接触传感器5a~5d为中心p的直径t2的圆形范围,构成为:通过将手、手指覆在该检测区域e(实际是将手等覆在检测区域e并经过例如0.5秒时),非接触传感器5a~5d中的某一个变为触发状态。
50.所述盛饭装置1在上部设置有开闭门7,若打开开闭门7,则在内部设置有用于收纳饭(熟米饭)r的收纳料斗8(参照图3、图4),在收纳料斗8的圆形的下端开口8a的下侧设置有饭输送部9。
51.所述饭输送部9(参照图3、图4、图8、图9)构成为:直立旋转轴10(图3参照)以作为所述下端开口8a(圆形)的中心的中心轴q为中心,以能够旋转的方式竖立设置在机框11上,在所述直立旋转轴10的前端部嵌合有罩12,在该罩12的周围设置有在旋转方向(箭头a方向)上呈凸状地弯曲的食材输送叶片13(4片)(参照图5),由驱动马达m1(参照图6)借助带14将该食材输送叶片13驱动为沿箭头a方向旋转。
52.在所述食材输送叶片13的下侧,以所述中心轴q为共同中心轴的固定圆形台15借助固定管15b(参照图3)被固定于机框11。所述固定圆形台15的上表面与所述食材输送叶片13的下缘的间隔极小,构成为:从收纳料斗8供给的饭通过所述食材输送叶片13的旋转而从
所述固定圆形台15上被送向外周部方向,从固定圆形台15的外周部15a的大致整周均等地下落从而被供给到下方。所述食材输送叶片13形成为前端比所述固定圆形台15的外周部15a略突出的长度(参照图7)。
53.在所述固定圆形台15的下方设置有上下开口的旋转圆筒体16,该旋转圆筒体16以所述中心轴q为共同中心轴,并且外径比所述固定圆形台15的外径大。构成为:该旋转圆筒体16的上缘16a位于比所述收纳料斗8的下端开口8a的高度更高水平的位置(参照图3),避免从所述料斗8的下端开口8a供给到下方的饭洒出到旋转圆筒体16的外部。
54.该旋转圆筒体16设置有:以所述中心轴q为中心的内部圆筒体16b(直径小于所述固定圆形台15的直径)、外部圆筒体16c(本旋转圆筒体16的直径)、将所述外部圆筒体16c的内表面与所述内部圆筒体16b的外表面连结的多个分隔板17(实际上是8片),在各分隔板17之间设置有食材室18(实际上是8个食材室18)(参照图5、图7)。
55.所述旋转圆筒体16的所述内部圆筒体16b的中心轴q侧与旋转轴19(参照图3)连接,该旋转轴19构成为能够通过驱动马达m2借助带20使该旋转轴19向与所述食材输送叶片13相反的方向(箭头b方向)旋转(参照图6)。
56.在所述旋转圆筒体16的下侧,圆形固定底板21设置于机框22。此外,所述旋转圆筒体16的分隔板17的下缘与所述圆形固定底板21的上表面的间隔极小,但是构成为所述旋转圆筒体16能够旋转。而且,构成为:饭从所述固定圆形台15的外周部15a与所述旋转圆筒体16(外部圆筒体16c)之间的空间5(参照图7)下落,从而饭被收纳到下方的多个所述食材室18内。
57.在所述圆形固定底板21的1个位置设置有饭的下落用的开口23(参照图5~图7),构成为:通过所述旋转圆筒体16的旋转,所述多个食材室18经过所述开口23的上部,由此食材室18内的饭从所述开口23下落从而被供给到下方。
58.在所述开口23的下方,通过与饭的下落方向(箭头d方向)正交的旋转轴而相互接近地配置有2个释放辊24a、24b(参照图8、图9)。这些释放辊24a、24b在外周具有多个凸状体,向彼此相向的方向(箭头c、c’方向)旋转,由此,通过所述凸状体释放从上方下落的饭,并且使该饭从饭出口25下落从而供给到下方的容器26。这些释放辊24a、24b分别被驱动马达m3、m4驱动为旋转(参照图9)。
59.在所述饭出口25的下方设置有容器载置部27。在所述容器载置部27的内部设置有电子秤28,通过电子秤28来测量容器26的重量以及供给到容器26内的饭的重量(参照图8)。
60.接着,对本发明所涉及的控制部29的结构进行说明(参照图10、图11)。
61.所述控制部29与选择按钮4a~4d连接,并且与非接触开关5a~5d连接。另外,所述控制部29与食材输送叶片13的驱动马达m1、旋转圆筒体16的驱动马达m2、释放辊23a、23b的驱动马达m3、m4、显示部3、电子秤28连接。
62.所述控制部29是具有cpu的计算机,存储有具有图12、图13所示的动作过程的程序,按照该程序(图12、图13所示的动作过程)来进行向容器26供给规定量的饭的供给动作。此外,图11是所述控制部29的功能模块,具体地说,按照下面的动作说明来进行说明。
63.本发明是如上所述那样构成的,因此下面按照图12、图13的动作过程以及图11的功能模块来说明动作。
64.首先,设为在所述盛饭装置1的收纳料斗8内收纳有热的熟饭(米饭),内部的饭r已
到达固定圆形台15上(参照图3)。另外,设为控制部29已确认所有非接触传感器5a~5d均未触发(参照图13,p1)。
65.设为此时食堂等的操作者将容器26载置到容器载置部27且例如在非接触传感器5c(150g)的可检测范围e内覆上了手或手指等(参照图12,p1)。
66.这样一来,非接触传感器5c检测到该动作从而被触发,向控制部29(图11,重量识别单元29a、单独判别单元29d、触发时间判别单元29e)发送触发信号(参照图12,p2)。在非接触传感器5c的情况下,控制部29(图11,重量识别单元29a)识别到是非接触传感器,转变为图13的步骤p1。所述控制部29(图11,重量识别单元29a)识别到从非接触传感器5c输入了触发信号(参照图13,p4)。
67.所述控制部29(图11,单独判别单元29d)识别到仅非接触传感器5c处于触发状态(参照图12,p8),向重量识别单元29a送出单独判别信号。此外,在多个非接触传感器(例如与非接触传感器5c相邻的非接触传感器5d)同时被触发的情况下,在图13的步骤p8中,返回到开始(图13的步骤p1),成为待机状态。这样,所述驱动单元29b构成为在基于所述单独判别单元29d的判别而判别为2个以上的所述非接触传感器同时被触发的状态下,不开始所述饭输送部9的动作。而且,所述驱动单元29b构成为仅在基于所述单独判别单元29d的判别而判别为单独的所述非接触传感器被触发的状态下,开始所述饭输送部9的动作。
68.所述控制部29(图11,触发时间判别单元29e)检测到非接触传感器5c的触发状态持续了例如0.5秒,向重量识别单元29a送出触发时间判别信号(参照图12,p12)。此外,在触发时间不到0.5秒的情况下,在图13的步骤p12中,返回到开始(图13的步骤p1),成为待机状态。这样,作为结果,所述驱动单元29b仅在所述触发时间判别单元29e中的触发状态持续了所述规定时间(例如0.5秒)时,被控制为驱动所述饭输送部9。此外,规定时间(0.5秒)的设定能够变更。
69.在图13的步骤p12中为“是”的情况下,控制部29(图11,重量识别单元29a)识别与非接触传感器5c对应的饭的重量“150g”,存储到临时存储区域30(参照图13,p16),向测量单元29c送出表示饭的重量“150g”的信号。
70.之后,控制部29(图11,容器重量判别单元29f)接受来自电子秤28的测量信号的输入,检查容器重量(参照图13,p18)。在此,当检测到容器26的重量足够(例如容器重量为30g以上)时(参照图13,p19),控制部29(图11,容器重量判别单元29)对驱动单元29b送出表示容器重量足够的意思的信号(驱动开始信号)(参照图13,p19)。此外,在容器26的重量不足的情况下(例如,在容器26为纸等而过轻从而无法承受饭的温度、饭的重量的情况下),在图13的步骤p19中,返回到图13的步骤p1而成为待机状态。这样,所述驱动单元29b构成为仅在通过所述容器重量判别单元29f识别到容器26的重量为固定重量以上的重量时驱动所述饭输送部9。另外,所述驱动单元29b构成为:在识别到所述容器26的重量为低于固定重量的重量的情况下,即使探测到所述非接触传感器的触发,也不进行所述饭输送部9的驱动。
71.所述控制部29(图11,驱动单元29b)当接收到来自所述容器重量判别单元29f的驱动开始信号时,开始驱动马达m1、m2、m3、m4的驱动,开始饭输送部9的动作(参照图12,p6)。
72.这样一来,食材输送叶片13向箭头a方向旋转,饭从固定圆形台15的外周部15a均等地下落从而被供给到下层的食材室18。所述旋转圆筒体16向反方向(箭头b方向)旋转,因此从外周部15a下落的饭被投入到多个食材室18内,食材室18内的饭被分隔板17向箭头b方
向输送,从开口23下落从而被供给到下方。
73.在所述开口23的正下方,释放辊24a、24b向相向方向(箭头c、c’方向)旋转,因此从所述开口23下落的饭一边被释放一边下落从而被供给到正下方的容器26内。而且,电子秤28测量饭的重量(容器26的重量+饭的重量-容器26的重量)的测量值,向测量单元29c送出测量信号(参照图12,p7)。
74.所述控制部29(图11,测量单元29c)在测量值变为“150g”时向重量识别单元29a送出到达信号。这样一来,控制部29(图11,重量识别单元29a)对驱动单元29b送出停止信号(参照图12,p8)。由此,驱动马达m1、m2、m3、m4停止,饭输送动作被中止。通过所述动作,容器26内会被供给150g的饭。
75.之后,操作者将盛有饭的容器26从容器载置部27中取出。所述控制部29(图11,重量识别单元29a)借助测量单元29c检测到电子秤28的测量值已变为“0”,从而检测到容器26已从容器载置部27中被取出(图12,p9),返回到图12的步骤p1。
76.所述操作者选择了其它非接触传感器5a、5b、5d时的动作也相同(图13,在非接触传感器5a的情况下为p2、p6、p10、p14,在非接触传感器5b的情况下为p3、p7、p11、p15,在非接触传感器5d的情况下为p5、p9、p13、p17),各所选择的重量的饭被供给到容器26内。
77.另外,在流程图中未示出,但是在选择了非接触传感器5a~5d中的任一者的情况下,控制部29(图11,重量识别单元29a)识别与所选择的非接触传感器对应的重量,指示显示控制单元29g显示所选择的重量。所述显示控制手段29g进行控制以在显示部3中显示所选择的重量。其结果,在显示部3中显示使用非接触传感器选择的饭的重量(例如若是非接触传感器5a则为50g)。
78.这样,操作者完全不用触摸选择按钮4a~4d,通过将手或手指覆在非接触传感器5a~5d的可检测范围e内就能够选择饭的重量,作为新型病毒的感染预防对策而言非常有效。
79.此外,接触式的选择按钮4a~4d中的任一者被按压时的动作大致相同(参照图12,p1),图12的步骤p2中为“否”,与选择按钮4a~4d对应的饭的重量被控制部29(图11,重量识别单元29a)存储到临时存储器30(参照图12,p3),之后,由控制部29(图11,容器重量判别单元29f)检查容器重量是否足够(参照图12,p4、p5),之后的动作与选择非接触传感器时的图12的步骤p6之后的动作相同,因此省略其详情。
80.这样,所述控制部29在检测到任一个所述选择按钮4a~4d被按压时,驱动所述饭输送部9来进行向容器26供给与所述选择按钮对应的重量的饭的供给动作。
81.本发明如以上那样,能够通过非接触传感器5a~5d选择饭r的重量,因此完全不接触选择按钮4a~4d就能够选择饭r的重量,作为新型病毒的感染预防对策而言非常有效。
82.另外,由于是非接触传感器,因此其它某种动作也可能导致变为触发状态,但是根据触发时间判别单元29e,仅在触发状态持续了规定时间时才驱动饭输送部9,因此能够有效地防止非接触传感器的误动作。
83.另外,由于是非接触传感器,因此例如也能够将手等覆在相邻的非接触传感器这两方的可检测范围e内,因此在这种情况下不开始动作,仅在只有单独的非接触传感器变为触发状态时开始饭输送部9的动作,从而能够有效地防止非接触传感器的误动作。
84.另外,能够防止载置在载置了不足以承受热饭、饭的重量的容器(例如纸容器)等
的情况下的误动作,仅在载置了足以承受饭的温度、饭的重量的容器的情况下驱动饭输送部9,由此能够防止误动作。
85.另外,在选择了非接触传感器的情况下,也在显示部3中显示该非接触传感器的饭的重量是多少克,因此能够使操作者获知盛饭装置侧已识别所选择的饭的重量。
86.另外,能够设置非接触传感器和接触型的选择按钮这两方,操作者能够随意地选择。
87.对所述的饭输送部9使用食材输送叶片13、旋转圆筒体16等的实施方式进行了说明,但是饭输送部9的形式并不限定于所述。因而,也可以是,使用送饭辊或者螺旋输送机等将饭向一个方向输送,使饭从一个方向的端部下落到下方,使用一对释放辊将饭释放到下方,饭下落从而供给到下方的容器,饭输送部9的形式并不被限定。
88.另外,对所述非接触传感器仅在通过单独判别单元探测到只有1个传感器的情况下驱动饭输送部的事例进行了说明,但是例如也可以构成为:将多个非接触传感器进行排列,在连续的3个非接触传感器变为触发状态的情况下,认为其正中间的非接触传感器变为触发状态,重量识别单元识别与正中间的非接触传感器对应的饭的重量(例如100g)。当这样构成时,虽然需要手或手指在空中的操作以触发非接触传感器,但是相较于使1个非接触传感器为触发状态,能够通过比较粗略的手或手指的操作来触发非接触传感器。
89.产业上的可利用性
90.根据本发明所涉及的使用非接触传感器的盛饭装置,能够实现作为新型病毒的感染预防对策而言非常有效的装置。