1.本实用新型涉及焊接机器人设备领域,具体为一种智能跟踪式焊接小车。
背景技术:
2.当前各种焊接小车多是有轨或增加导向行走,作业时需工人将轨道架设在所需焊合工件一侧,与焊缝保持相对平行,操作过程繁琐,且多为直线型焊缝,对曲线型焊缝不能满足使用,这样一来对焊接作业就会有很大的局限性。
技术实现要素:
3.本实用新型的目的在于提供一种智能跟踪式焊接小车以解决上述背景技术中提出的问题,该焊接小车无需导轨或者导向装置,能够通过遥控或者其他控制方式实现焊缝跟踪作业,并能够与焊缝保持相对位置,并适用于曲线焊缝。
4.为实现上述目的,本实用新型提供了一种智能跟踪式焊接小车,包括焊枪、焊接小车及设置在焊接小车上的焊枪调整机构,所述焊接小车由其转向轮和动力轮搭载在工件焊接工作面上,所述转向轮及动力轮均为通过磁力开关控制开关磁的磁力轮;
5.所述焊枪调整机构包括固定于焊接小车上的z轴滑台及沿着所述z轴滑台滑动的z轴滑台座,且所述z轴滑台座前端面上设有旋转轴,所述旋转轴连接有一能够通过该旋转轴相对z轴滑台座转动的y轴滑台,所述y轴滑台上设有沿着所述y轴滑台方向滑动的y轴滑台座,所述y轴滑台座固定有支座,所述焊枪通过焊枪夹固定于所述支座上。
6.作为本实用新型的优选方案,所述焊接小车为四轮行走小车,且所述动力轮为后轮,转向轮为前轮。
7.作为本实用新型的优选方案,所述焊接小车具有承载所述动力轮、转向轮及焊枪调整机构的车架,且车架外覆盖壳体,所述壳体前端设有提手。
8.作为本实用新型的优选方案,所述z轴滑台及y轴滑台分别包括滑杆、电机及由电机驱动的伸缩杆,其中,z轴滑台座、y轴滑台座分别通过连接其对应的z轴滑台、y轴滑台的伸缩杆从而在其对应滑杆上滑动和固定。
9.作为本实用新型的优选方案,所述焊枪夹具有通过螺栓紧固的锁紧环,且所述锁紧环套接固定于所述支座突出的圆柱端外。
10.作为本实用新型的优选方案,还包括无线遥控器,并且由无线遥控器上的发射器和焊接小车上的接收器两部分组成无线遥控系统。
11.本实用新型的有益效果在于:
12.首先,在焊接作业时,将本实用新型中的焊枪调整机构能够通过控制z轴滑台的上下滑动,从而调控焊枪与工件的相对高度,通过电机及其驱动的伸缩杆实时根据焊接小车的位置控制y轴滑台的滑动距离,从而保障y轴滑台和旋转轴能够调控焊枪在针对曲线型焊缝时的跟随性。
13.其次,本实用新型中焊接小车采用磁力轮吸附在工件上,无需额外的支架或者驱
动装置,同时焊接小车具有转向轮和动力轮,能够在工件上完成不同方向的前进运动,从而配合焊枪调整机构完成对焊枪焊点全方位的适应。
14.此外,本实用新型通过焊接小车自身能够在x轴方向前进并且转向,以及焊枪调整机构的y轴、z轴、旋转轴的配合,能够实现多种焊接模式的切换,满足多种焊缝形式(平焊、立焊、仰焊、管道的环焊等)的焊接作业。
附图说明
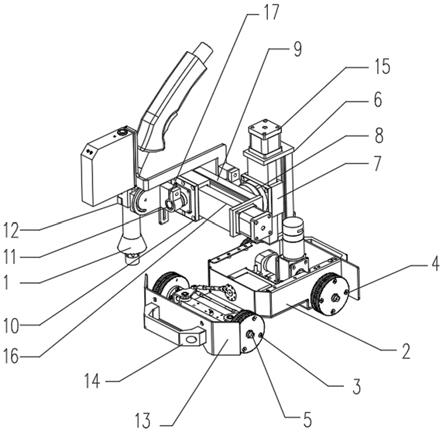
15.图1为实用新型的结构示意图;
16.图2为本实用新型的工作状态示意图;
17.图中:1、焊枪,2、焊接小车,3、转向轮,4、动力轮,5、磁力开关,6、z轴滑台,7、z轴滑台座,8、旋转轴,9、y轴滑台,10、y轴滑台座,11、支座,12、焊枪夹,13、壳体,14、提手,15、电机,16、滑杆,17、锁紧环,18、工作面,19、无线遥控器,20、焊缝。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.实施例一
20.如图1及图2所示的一种智能跟踪式焊接小车,包括焊枪1、焊接小车2及设置在焊接小车2上的焊枪调整机构,所述焊接小车2由其转向轮3和动力轮4搭载在工件焊接工作面18上,所述转向轮3及动力轮4均为通过磁力开关5控制开关磁的磁力轮;
21.所述焊枪调整机构包括固定于焊接小车2上的z轴滑台6及沿着所述z轴滑台6滑动的z轴滑台座7,且所述z轴滑台座前端面上设有旋转轴8,所述旋转轴8连接有一能够通过该旋转轴8相对z轴滑台座7转动的y轴滑台9,所述y轴滑台9上设有沿着所述y轴滑台9方向滑动的y轴滑台座10,所述y轴滑台座10固定有支座11,所述焊枪1通过焊枪夹12固定于所述支座11上。
22.在本实施例中,所述焊接小车2为四轮行走小车,且所述动力轮4为后轮,转向轮3为前轮。
23.在本实施例中,所述焊接小车2具有承载所述动力轮4、转向轮3及焊枪调整机构的车架,且车架外覆盖壳体13,所述壳体13前端设有提手14。
24.在本实施例中,所述z轴滑台6及y轴滑台9分别包括滑杆16、电机15及由电机15驱动的伸缩杆,其中,z轴滑台座7、y轴滑台座10分别通过连接其对应的z轴滑台6、y轴滑台9的伸缩杆从而在其对应滑杆16上滑动和固定。
25.在本实施例中,所述焊枪夹12具有通过螺栓紧固的锁紧环17,且所述锁紧环17套接固定于所述支座11突出的圆柱端外。
26.实施例二
27.相比于实施例1,本实施例中的一种智能跟踪式焊接小车,还包括无线遥控系统,该无线遥控系统由无线遥控器19上的发射器和焊接小车2的接收器两部分组成,所述无线
遥控器19能够通过摇杆参数控制焊接小车2的动力轮及转向轮动作,从而实现焊接小车的前后左右移动。
28.基于上述,本实用新型在焊接作业时,首先将工件及工件工作面18调整好,将焊接小车2置于工作面18上,开始工作时打开磁力开关5,操作控制动力轮和转向轮配合完成焊接小车跟随焊缝的前后左右移动,同时控制z轴滑台座7上下滑动调节焊枪1与工作面18的相对高度,并控制旋转轴和y轴滑台座10的运动,使得焊枪1与焊缝的相对位置达到预期,当焊接完成后,焊接小车2停止前进,可通过磁力开关5关磁,通过提手14以便于焊接小车2的转运。
29.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种智能跟踪式焊接小车,包括焊枪、焊接小车及设置在焊接小车上的焊枪调整机构,其特征在于,所述焊接小车由其转向轮和动力轮搭载在工件焊接工作面上,所述转向轮及动力轮均为通过磁力开关控制开关磁的磁力轮;所述焊枪调整机构包括固定于焊接小车上的z轴滑台及沿着所述z轴滑台滑动的z轴滑台座,且所述z轴滑台座前端面上设有旋转轴,所述旋转轴连接有一能够通过该旋转轴相对z轴滑台座转动的y轴滑台,所述y轴滑台上设有沿着所述y轴滑台方向滑动的y轴滑台座,所述y轴滑台座固定有支座,所述焊枪通过焊枪夹固定于所述支座上。2.根据权利要求1所述的一种智能跟踪式焊接小车,其特征在于,所述焊接小车为四轮行走小车,且所述动力轮为后轮,转向轮为前轮。3.根据权利要求1所述的一种智能跟踪式焊接小车,其特征在于,所述焊接小车具有承载所述动力轮、转向轮及焊枪调整机构的车架,且车架外覆盖壳体,所述壳体前端设有提手。4.根据权利要求1所述的一种智能跟踪式焊接小车,其特征在于,所述z轴滑台及y轴滑台分别包括滑杆、电机及由电机驱动的伸缩杆,其中,z轴滑台座、y轴滑台座分别通过连接其对应的z轴滑台、y轴滑台的伸缩杆从而在其对应滑杆上滑动和固定。5.根据权利要求1所述的一种智能跟踪式焊接小车,其特征在于,所述焊枪夹具有通过螺栓紧固的锁紧环,且所述锁紧环套接固定于所述支座突出的圆柱端外。6.根据权利要求1所述的一种智能跟踪式焊接小车,其特征在于,还包括无线遥控器,并且由无线遥控器上的发射器和焊接小车上的接收器两部分组成无线遥控系统。
技术总结
本实用新型公开了一种智能跟踪式焊接小车,所述焊接小车由其转向轮和动力轮搭载在工件焊接工作面上,所述转向轮及动力轮均为通过磁力开关控制开关磁的磁力轮;焊枪调整机构包括固定于焊接小车上的Z轴滑台及沿着所述Z轴滑台滑动的Z轴滑台座,且所述Z轴滑台座前端面上设有旋转轴,所述旋转轴连接有一能够通过该旋转轴相对Z轴滑台座转动的Y轴滑台,所述Y轴滑台上设有沿着所述Y轴滑台方向滑动的Y轴滑台座,所述Y轴滑台座固定有支座,焊枪通过焊枪夹固定于所述支座上。本实用新型中焊接小车无需导轨或者导向装置,能够通过遥控或者其他控制方式实现焊缝跟踪作业,并能够与焊缝保持相对位置,并适用于曲线焊缝。并适用于曲线焊缝。并适用于曲线焊缝。
技术研发人员:李井卫 孔强 李会敏
受保护的技术使用者:山东通祥环保科技有限责任公司
技术研发日:2021.09.01
技术公布日:2022/1/14