1.本实用新型属于辅助焊接技术领域,更具体地说,特别涉及一种托架机器人自动焊接装置。
背景技术:
2.机器人托架是对机器人进行支撑的装置,托架一般由上底座、下底座、芯轴等构件组成,方便机器人在使用过程中的固定设备及加工零件,提高焊接的精准度及其加工效率。
3.对于目前技术还存在以下几点不足:
4.在焊接机器人焊接的时候只能针对单个零件焊接并不能进行多组焊接的过程,使得在多个零件拼凑焊接时效率低下,另一方面在多组焊接的时候需确定零件位置放置准确避免误差过大直接影响到焊接质量。
5.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种托架机器人自动焊接装置,以期达到更加实用的目的。
技术实现要素:
6.为了解决上述技术问题,本实用新型提供一种托架机器人自动焊接装置,以解决现有的焊接机器人焊接的时候只能针对单个零件焊接并不能进行多组焊接的过程,使得在多个零件拼凑焊接时效率低下与在多组焊接的时候需确定零件位置放置准确避免误差过大直接影响到焊接质量的问题。
7.本实用新型一种托架机器人自动焊接装置的目的与功效,由以下具体技术手段所达成:
8.一种托架机器人自动焊接装置,包括工装底架;
9.所述工装底架整体为工字形状,且工装底架四边角位置均设置有一处矩形立柱,每处矩形立柱底部位置均设置有一处架体限位板,工装底架四处矩形立柱上端位置与下固定板底部位置相连接;工装底架包括有:
10.边角板,边角板共有四处,四处边角板均为三角形形状,四处边角板分别设置在工装底架工字形状的两端内侧的转角位置。
11.进一步的,所述下固定板整体为矩形形状,下固定板包括有:
12.插接块,插接块共设置有四处,每处插接块底部均设置有凵字形状的插槽,四处插接块分别对称设置在下固定板底部四边角位置,工装底架四处矩形立柱,分别插接在四处插接块内,每处插接块侧面位置均设置有倾斜形状的连接杆。
13.进一步的,一种托架机器人自动焊接装置包括有上固定板;所述上固定板包括有:
14.上固定板为矩形形状,且上固定板四边角位置为圆角设计,上固定板上端位置设置有四处气缸,且每相邻的气缸间距相同;
15.架体定位销,架体定位销共设置有四处,四处架体定位销分别设置在上固定板内侧位置,四处架体定位销呈方形分布,上固定板底部通过架体定位销的配合与下固定板顶
部位置固定连接。
16.进一步的,所述气缸上端位置设置有t形板,且气缸t形板的前后两侧下方位置均设置有连接柱。
17.进一步的,一种托架机器人自动焊接装置包括有零件定位块;所述零件定位块共设置有八处,且八处零件定位块均设置在上固定板顶端面位置,八处零件定位块分别位于八处夹紧钳下方位置,零件定位块整体为倒t形状。
18.进一步的,所述气缸包括有:夹紧钳,气缸前后两端位置均转动连接有一处夹紧钳,且夹紧钳上端位置与气缸t形板连接柱底部位置相接触;
19.零件定位销,每处夹紧钳均设置有零件定位销。
20.进一步的,一种托架机器人自动焊接装置包括有气动手柄;所述气动手柄设置在上固定板的顶部前端的中间位置,气动手柄前端位置设置有把手。
21.与现有技术相比,本实用新型具有如下有益效果:
22.由于四处边角板均为三角形形状,可以起到稳固工装底架整体的效果,避免工装底架受到外力拉伸变形,致使工装底架寿命缩短的问题发生。
23.由于零件定位块整体为倒t形状,根据每相邻两处零件定位块的形状可以快速确定所需加工零件的储放轮廓位置进行投放,提高放置的效率,在再通过夹紧钳的配合对多个位置确定的零件进行同时固定,便于进行多组焊接的过程提高焊接效率。
24.由于每处插接块底部均设置有凵字形状的插槽,四处插接块分别对称设置在下固定板底部四边角位置,且每处插接块侧面位置均设置有倾斜形状的连接杆,通过连接杆的配合,形成三角形支撑效果,避免插接块凵字形状的插槽变形,影响下固定板与工装底架的对接。
25.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
26.图1是本实用新型的俯视状态结构示意图。
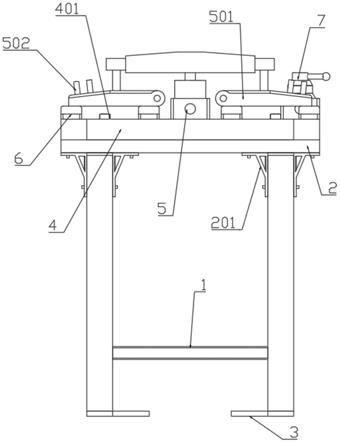
27.图2是本实用新型的左视状态结构示意图。
28.图3是本实用新型的侧视状态结构示意图。
29.图4是本实用新型的下固定板底侧视结构示意图。
30.图中,部件名称与附图编号的对应关系为:
31.1、工装底架;101、边角板;2、下固定板;201、插接块;3、架体限位板;4、上固定板;401、架体定位销;5、气缸;501、夹紧钳;502、零件定位销;6、零件定位块;7、气动手柄。
具体实施方式
32.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
33.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是
指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
34.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
35.实施例:
36.如附图1至附图4所示:
37.本实用新型提供一种托架机器人自动焊接装置,包括工装底架1;
38.工装底架1整体为工字形状,且工装底架1四边角位置均设置有一处矩形立柱,每处矩形立柱底部位置均设置有一处架体限位板3,工装底架1四处矩形立柱上端位置与下固定板2底部位置相连接;工装底架1包括有:边角板101,边角板101共有四处,四处边角板101均为三角形形状,四处边角板101分别设置在工装底架1工字形状的两端内侧的转角位置;下固定板2整体为矩形形状,下固定板2包括有:插接块201;插接块201共设置有四处,每处插接块201底部均设置有凵字形状的插槽,四处插接块201分别对称设置在下固定板2底部四边角位置,工装底架1四处矩形立柱,分别插接在四处插接块201内,每处插接块201侧面位置均设置有倾斜形状的连接杆。
39.通过采用上述技术方案,通过架体限位板3的连接地面,对限制工装底架1整体位置进行限制,避免工装底架1出现移动的情况,同时四处边角板101均为三角形形状,稳固工装底架1,避免工装底架1受到外力拉伸变形。
40.其中,一种托架机器人自动焊接装置包括有上固定板4;上固定板4包括有:
41.上固定板4为矩形形状,且上固定板4四边角位置为圆角设计,上固定板4上端位置设置有四处气缸5,且每相邻的气缸5间距相同;
42.架体定位销401,架体定位销401共设置有四处,四处架体定位销401分别设置在上固定板4内侧位置,四处架体定位销401呈方形分布,上固定板4底部通过架体定位销401的配合与下固定板2顶部位置固定连接。
43.通过采用上述技术方案,通过架体定位销401的配合可对上固定板4以及下固定板2进行拆卸与组装,同时可以起到位置限制的效果。
44.其中,气缸5上端位置设置有t形板,且气缸5t形板的前后两侧下方位置均设置有连接柱,气缸5包括有:夹紧钳501,气缸5前后两端位置均转动连接有一处夹紧钳501,且夹紧钳501上端位置与气缸5t形板连接柱底部位置相接触;零件定位销502,每处夹紧钳501均设置有零件定位销502。
45.通过采用上述技术方案,零件定位销502对零件放置的位置进行限位,避免出现零件放置不准确的情况下产生误差的情况。
46.一种托架机器人自动焊接装置包括有零件定位块6;零件定位块6共设置有八处,且八处零件定位块6均设置在上固定板4顶端面位置,八处零件定位块6分别位于八处夹紧钳501下方位置,零件定位块6整体为倒t形状。
47.通过采用上述技术方案,根据每相邻两处零件定位块6的形状可以快速确定所需
加工零件的储放轮廓位置进行投放,提高放置的效率。
48.其中,一种托架机器人自动焊接装置包括有气动手柄7;气动手柄7设置在上固定板4的顶部前端的中间位置,气动手柄7前端位置设置有把手。
49.本实施例的具体使用方式与作用:
50.在使用本装置的时候,首先将工装底架1通过四处架体限位板3的配合,将工装底架1整体固定到地面上,避免工装底架1出现晃动移动的情况,排除在放置零件的过程中零件错位的问题,接下来启动气缸5,气缸5带动夹紧钳501向上翻转,之后将零件放置在相邻两处零件定位块6中间位置,再通过气缸5的下降带动夹紧钳501进行复位,对零件定位块6上的零件进行固定,之后对托架机器人的气路进行连接,调试好机器人的参数数据,对零件定位块6上的零件进行焊接。
51.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。